 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPS-Enhanced Tourist Mobility Modeling with Seasonal Spatial Priors and LLM-Based Activity Chain Generation
May 28, 2026Tourist mobility poses a distinct challenge for urban transportation planning. Unlike resident commuting, tourist travel is largely non-routine, attraction driven, and highly sensitive to trip purpose, travel season, and trip member composition. Existing approaches either measure aggregate tourist spatial patterns without generating individual schedules, or synthesize mobility without tourist specific structure such as trip duration conditioning, month varying attraction demand, and household co-travel rules. To address these challenges, we propose a four stage simulation framework combining month conditioned spatial priors derived from GPS and survey data, trip extent prediction from tourist demographics, distance feasible ward sequence assignment, and LLM-based activity chain generation under household and spatial constraints. GPS data are used only in privacy preserving aggregated form as month conditioned spatial priors, with no individual traces retained or exposed. Experiments on tourism in Tokyo demonstrate that the GPS based tourist cohort extraction recovers spatial visitation signatures consistent with survey references, and our framework produces demographically aligned synthetic schedules whose ward-level visitation shares align closely with both survey distributions and staypoint derived monthly visitation patterns. The results demonstrate the framework's effectiveness as a geographically grounded, demographically aware approach to tourist mobility modeling.
MobiFuse: Learning Universal Human Mobility Patterns through Cross-domain Data Fusion
Mar 20, 2025Human mobility modeling is critical for urban planning and transportation management, yet existing datasets often lack the resolution and semantic richness required for comprehensive analysis. To address this, we proposed a cross-domain data fusion framework that integrates multi-modal data of distinct nature and spatio-temporal resolution, including geographical, mobility, socio-demographic, and traffic information, to construct a privacy-preserving and semantically enriched human travel trajectory dataset. This framework is demonstrated through two case studies in Los Angeles (LA) and Egypt, where a domain adaptation algorithm ensures its transferability across diverse urban contexts. Quantitative evaluation shows that the generated synthetic dataset accurately reproduces mobility patterns observed in empirical data. Moreover, large-scale traffic simulations for LA County based on the generated synthetic demand align well with observed traffic. On California's I-405 corridor, the simulation yields a Mean Absolute Percentage Error of 5.85% for traffic volume and 4.36% for speed compared to Caltrans PeMS observations.
Reconstructing Human Mobility Pattern: A Semi-Supervised Approach for Cross-Dataset Transfer Learning
Oct 03, 2024



Understanding human mobility patterns is crucial for urban planning, transportation management, and public health. This study tackles two primary challenges in the field: the reliance on trajectory data, which often fails to capture the semantic interdependencies of activities, and the inherent incompleteness of real-world trajectory data. We have developed a model that reconstructs and learns human mobility patterns by focusing on semantic activity chains. We introduce a semi-supervised iterative transfer learning algorithm to adapt models to diverse geographical contexts and address data scarcity. Our model is validated using comprehensive datasets from the United States, where it effectively reconstructs activity chains and generates high-quality synthetic mobility data, achieving a low Jensen-Shannon Divergence (JSD) value of 0.001, indicating a close similarity between synthetic and real data. Additionally, sparse GPS data from Egypt is used to evaluate the transfer learning algorithm, demonstrating successful adaptation of US mobility patterns to Egyptian contexts, achieving a 64\% of increase in similarity, i.e., a JSD reduction from 0.09 to 0.03. This mobility reconstruction model and the associated transfer learning algorithm show significant potential for global human mobility modeling studies, enabling policymakers and researchers to design more effective and culturally tailored transportation solutions.
Human Mobility Modeling with Limited Information via Large Language Models
Sep 26, 2024



Understanding human mobility patterns has traditionally been a complex challenge in transportation modeling. Due to the difficulties in obtaining high-quality training datasets across diverse locations, conventional activity-based models and learning-based human mobility modeling algorithms are particularly limited by the availability and quality of datasets. Furthermore, current research mainly focuses on the spatial-temporal travel pattern but lacks an understanding of the semantic information between activities, which is crucial for modeling the interdependence between activities. In this paper, we propose an innovative Large Language Model (LLM) empowered human mobility modeling framework. Our proposed approach significantly reduces the reliance on detailed human mobility statistical data, utilizing basic socio-demographic information of individuals to generate their daily mobility patterns. We have validated our results using the NHTS and SCAG-ABM datasets, demonstrating the effective modeling of mobility patterns and the strong adaptability of our framework across various geographic locations.
NUMOSIM: A Synthetic Mobility Dataset with Anomaly Detection Benchmarks
Sep 04, 2024



Collecting real-world mobility data is challenging. It is often fraught with privacy concerns, logistical difficulties, and inherent biases. Moreover, accurately annotating anomalies in large-scale data is nearly impossible, as it demands meticulous effort to distinguish subtle and complex patterns. These challenges significantly impede progress in geospatial anomaly detection research by restricting access to reliable data and complicating the rigorous evaluation, comparison, and benchmarking of methodologies. To address these limitations, we introduce a synthetic mobility dataset, NUMOSIM, that provides a controlled, ethical, and diverse environment for benchmarking anomaly detection techniques. NUMOSIM simulates a wide array of realistic mobility scenarios, encompassing both typical and anomalous behaviours, generated through advanced deep learning models trained on real mobility data. This approach allows NUMOSIM to accurately replicate the complexities of real-world movement patterns while strategically injecting anomalies to challenge and evaluate detection algorithms based on how effectively they capture the interplay between demographic, geospatial, and temporal factors. Our goal is to advance geospatial mobility analysis by offering a realistic benchmark for improving anomaly detection and mobility modeling techniques. To support this, we provide open access to the NUMOSIM dataset, along with comprehensive documentation, evaluation metrics, and benchmark results.
An Attention-Based Multi-Context Convolutional Encoder-Decoder Neural Network for Work Zone Traffic Impact Prediction
May 31, 2024



Work zone is one of the major causes of non-recurrent traffic congestion and road incidents. Despite the significance of its impact, studies on predicting the traffic impact of work zones remain scarce. In this paper, we propose a data integration pipeline that enhances the utilization of work zone and traffic data from diversified platforms, and introduce a novel deep learning model to predict the traffic speed and incident likelihood during planned work zone events. The proposed model transforms traffic patterns into 2D space-time images for both model input and output and employs an attention-based multi-context convolutional encoder-decoder architecture to capture the spatial-temporal dependencies between work zone events and traffic variations. Trained and validated on four years of archived work zone traffic data from Maryland, USA, the model demonstrates superior performance over baseline models in predicting traffic speed, incident likelihood, and inferred traffic attributes such as queue length and congestion timings (i.e., start time and duration). Specifically, the proposed model outperforms the baseline models by reducing the prediction error of traffic speed by 5% to 34%, queue length by 11% to 29%, congestion timing by 6% to 17%, and increasing the accuracy of incident predictions by 5% to 7%. Consequently, this model offers substantial promise for enhancing the planning and traffic management of work zones.
Deep Activity Model: A Generative Approach for Human Mobility Pattern Synthesis
May 24, 2024



Human mobility significantly impacts various aspects of society, including transportation, urban planning, and public health. The increasing availability of diverse mobility data and advancements in deep learning have revolutionized mobility modeling. Existing deep learning models, however, mainly study spatio-temporal patterns using trajectories and often fall short in capturing the underlying semantic interdependency among activities. Moreover, they are also constrained by the data source. These two factors thereby limit their realism and adaptability, respectively. Meanwhile, traditional activity-based models (ABMs) in transportation modeling rely on rigid assumptions and are costly and time-consuming to calibrate, making them difficult to adapt and scale to new regions, especially those regions with limited amount of required conventional travel data. To address these limitations, we develop a novel generative deep learning approach for human mobility modeling and synthesis, using ubiquitous and open-source data. Additionally, the model can be fine-tuned with local data, enabling adaptable and accurate representations of mobility patterns across different regions. The model is evaluated on a nationwide dataset of the United States, where it demonstrates superior performance in generating activity chains that closely follow ground truth distributions. Further tests using state- or city-specific datasets from California, Washington, and Mexico City confirm its transferability. This innovative approach offers substantial potential to advance mobility modeling research, especially in generating human activity chains as input for downstream activity-based mobility simulation models and providing enhanced tools for urban planners and policymakers.
Semantic Trajectory Data Mining with LLM-Informed POI Classification
May 20, 2024



Human travel trajectory mining is crucial for transportation systems, enhancing route optimization, traffic management, and the study of human travel patterns. Previous rule-based approaches without the integration of semantic information show a limitation in both efficiency and accuracy. Semantic information, such as activity types inferred from Points of Interest (POI) data, can significantly enhance the quality of trajectory mining. However, integrating these insights is challenging, as many POIs have incomplete feature information, and current learning-based POI algorithms require the integrity of datasets to do the classification. In this paper, we introduce a novel pipeline for human travel trajectory mining. Our approach first leverages the strong inferential and comprehension capabilities of large language models (LLMs) to annotate POI with activity types and then uses a Bayesian-based algorithm to infer activity for each stay point in a trajectory. In our evaluation using the OpenStreetMap (OSM) POI dataset, our approach achieves a 93.4% accuracy and a 96.1% F-1 score in POI classification, and a 91.7% accuracy with a 92.3% F-1 score in activity inference.
Evaluating Cybersecurity Risks of Cooperative Ramp Merging in Mixed Traffic Environments
Nov 18, 2021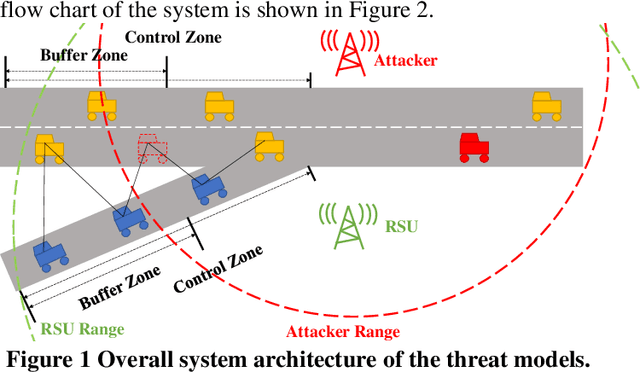
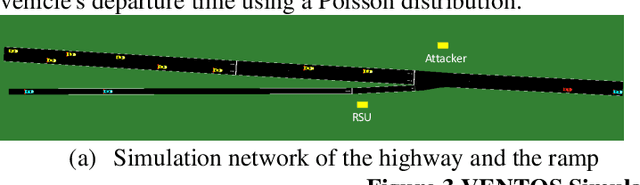
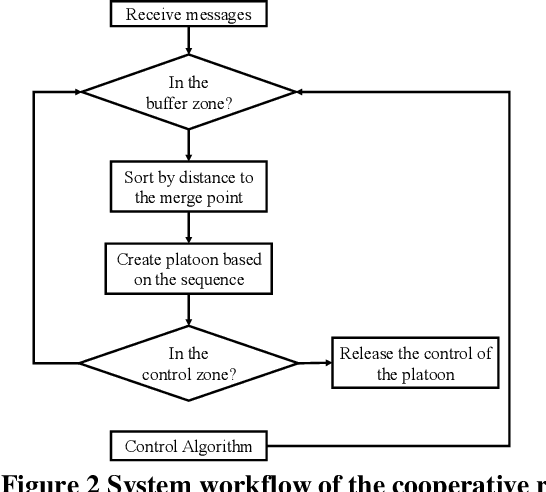
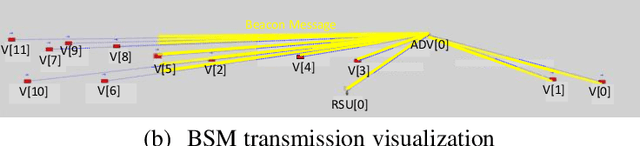
Connected and Automated Vehicle (CAV) technology has the potential to greatly improve transportation mobility, safety, and energy efficiency. However, ubiquitous vehicular connectivity also opens up the door for cyber-attacks. In this study, we investigate cybersecurity risks of a representative cooperative traffic management application, i.e., highway on-ramp merging, in a mixed traffic environment. We develop threat models with two trajectory spoofing strategies on CAVs to create traffic congestion, and we also devise an attack-resilient strategy for system defense. Furthermore, we leverage VENTOS, a Veins extension simulator made for CAV applications, to evaluate cybersecurity risks of the attacks and performance of the proposed defense strategy. A comprehensive case study is conducted across different traffic congestion levels, penetration rates of CAVs, and attack ratios. As expected, the results show that the performance of mobility decreases up to 55.19% at the worst case when the attack ratio increases, as does safety and energy. With our proposed mitigation defense algorithm, the system's cyber-attack resiliency is greatly improved.
End-to-End Vision-Based Adaptive Cruise Control Using Deep Reinforcement Learning
Jan 24, 2020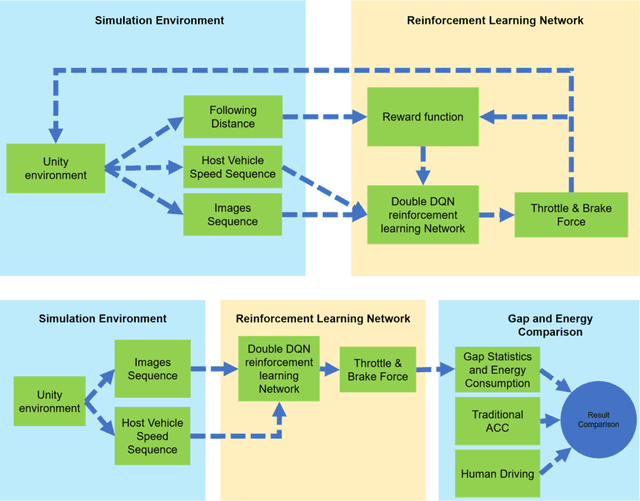
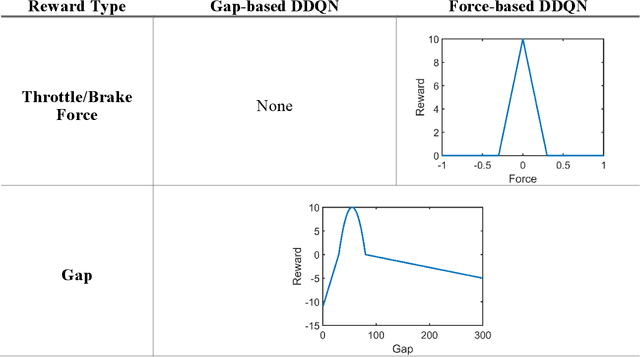
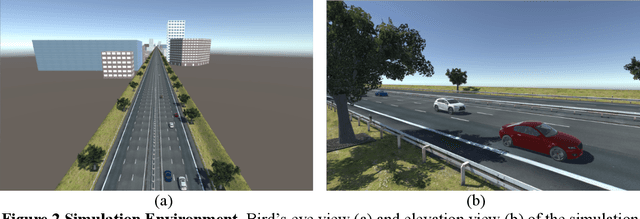
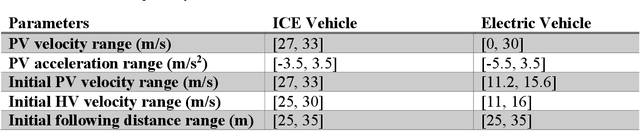
This paper presented a deep reinforcement learning method named Double Deep Q-networks to design an end-to-end vision-based adaptive cruise control (ACC) system. A simulation environment of a highway scene was set up in Unity, which is a game engine that provided both physical models of vehicles and feature data for training and testing. Well-designed reward functions associated with the following distance and throttle/brake force were implemented in the reinforcement learning model for both internal combustion engine (ICE) vehicles and electric vehicles (EV) to perform adaptive cruise control. The gap statistics and total energy consumption are evaluated for different vehicle types to explore the relationship between reward functions and powertrain characteristics. Compared with the traditional radar-based ACC systems or human-in-the-loop simulation, the proposed vision-based ACC system can generate either a better gap regulated trajectory or a smoother speed trajectory depending on the preset reward function. The proposed system can be well adaptive to different speed trajectories of the preceding vehicle and operated in real-time.