 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Crash: Hijacking Your Autonomous Vehicle for Fun and Profit
Feb 06, 2026Autonomous Vehicles (AVs), especially vision-based AVs, are rapidly being deployed without human operators. As AVs operate in safety-critical environments, understanding their robustness in an adversarial environment is an important research problem. Prior physical adversarial attacks on vision-based autonomous vehicles predominantly target immediate safety failures (e.g., a crash, a traffic-rule violation, or a transient lane departure) by inducing a short-lived perception or control error. This paper shows a qualitatively different risk: a long-horizon route integrity compromise, where an attacker gradually steers a victim AV away from its intended route and into an attacker-chosen destination while the victim continues to drive "normally." This will not pose a danger to the victim vehicle itself, but also to potential passengers sitting inside the vehicle. In this paper, we design and implement the first adversarial framework, called JackZebra, that performs route-level hijacking of a vision-based end-to-end driving stack using a physically plausible attacker vehicle with a reconfigurable display mounted on the rear. The central challenge is temporal persistence: adversarial influence must remain effective in changing viewpoints, lighting, weather, traffic, and the victim's continual replanning -- without triggering conspicuous failures. Our key insight is to treat route hijacking as a closed-loop control problem and to convert adversarial patches into steering primitives that can be selected online via an interactive adjustment loop. Our adversarial patches are also carefully designed against worst-case background and sensor variations so that the adversarial impacts on the victim. Our evaluation shows that JackZebra can successfully hijack victim vehicles to deviate from original routes and stop at adversarial destinations with a high success rate.
Evaluating Cybersecurity Risks of Cooperative Ramp Merging in Mixed Traffic Environments
Nov 18, 2021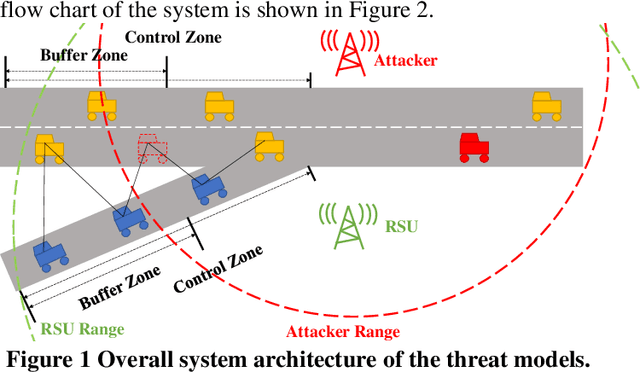
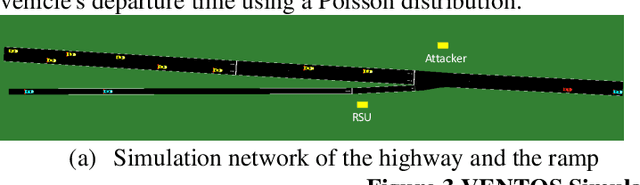
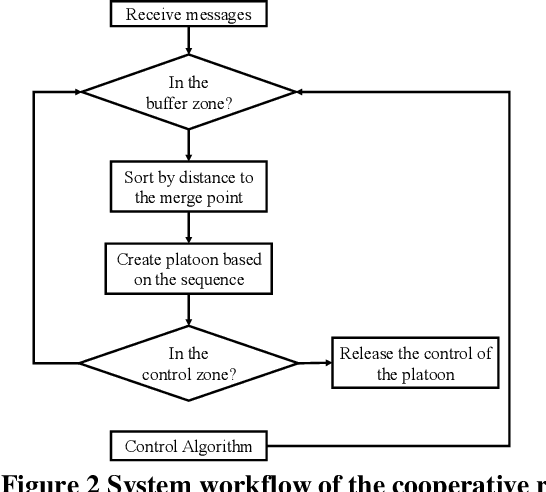
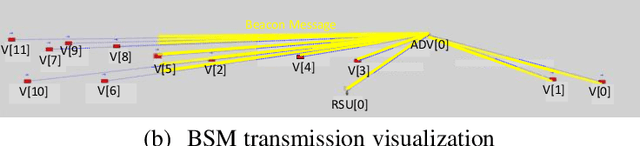
Connected and Automated Vehicle (CAV) technology has the potential to greatly improve transportation mobility, safety, and energy efficiency. However, ubiquitous vehicular connectivity also opens up the door for cyber-attacks. In this study, we investigate cybersecurity risks of a representative cooperative traffic management application, i.e., highway on-ramp merging, in a mixed traffic environment. We develop threat models with two trajectory spoofing strategies on CAVs to create traffic congestion, and we also devise an attack-resilient strategy for system defense. Furthermore, we leverage VENTOS, a Veins extension simulator made for CAV applications, to evaluate cybersecurity risks of the attacks and performance of the proposed defense strategy. A comprehensive case study is conducted across different traffic congestion levels, penetration rates of CAVs, and attack ratios. As expected, the results show that the performance of mobility decreases up to 55.19% at the worst case when the attack ratio increases, as does safety and energy. With our proposed mitigation defense algorithm, the system's cyber-attack resiliency is greatly improved.