 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-modal Detection System for Infrastructure-based Freight Signal Priority
Feb 19, 2026Freight vehicles approaching signalized intersections require reliable detection and motion estimation to support infrastructure-based Freight Signal Priority (FSP). Accurate and timely perception of vehicle type, position, and speed is essential for enabling effective priority control strategies. This paper presents the design, deployment, and evaluation of an infrastructure-based multi-modal freight vehicle detection system integrating LiDAR and camera sensors. A hybrid sensing architecture is adopted, consisting of an intersection-mounted subsystem and a midblock subsystem, connected via wireless communication for synchronized data transmission. The perception pipeline incorporates both clustering-based and deep learning-based detection methods with Kalman filter tracking to achieve stable real-time performance. LiDAR measurements are registered into geodetic reference frames to support lane-level localization and consistent vehicle tracking. Field evaluations demonstrate that the system can reliably monitor freight vehicle movements at high spatio-temporal resolution. The design and deployment provide practical insights for developing infrastructure-based sensing systems to support FSP applications.
PDB: Not All Drivers Are the Same -- A Personalized Dataset for Understanding Driving Behavior
Mar 09, 2025


Driving behavior is inherently personal, influenced by individual habits, decision-making styles, and physiological states. However, most existing datasets treat all drivers as homogeneous, overlooking driver-specific variability. To address this gap, we introduce the Personalized Driving Behavior (PDB) dataset, a multi-modal dataset designed to capture personalization in driving behavior under naturalistic driving conditions. Unlike conventional datasets, PDB minimizes external influences by maintaining consistent routes, vehicles, and lighting conditions across sessions. It includes sources from 128-line LiDAR, front-facing camera video, GNSS, 9-axis IMU, CAN bus data (throttle, brake, steering angle), and driver-specific signals such as facial video and heart rate. The dataset features 12 participants, approximately 270,000 LiDAR frames, 1.6 million images, and 6.6 TB of raw sensor data. The processed trajectory dataset consists of 1,669 segments, each spanning 10 seconds with a 0.2-second interval. By explicitly capturing drivers' behavior, PDB serves as a unique resource for human factor analysis, driver identification, and personalized mobility applications, contributing to the development of human-centric intelligent transportation systems.
Cyber Mobility Mirror: A Deep Learning-based Real-World Object Perception Platform Using Roadside LiDAR
Apr 07, 2022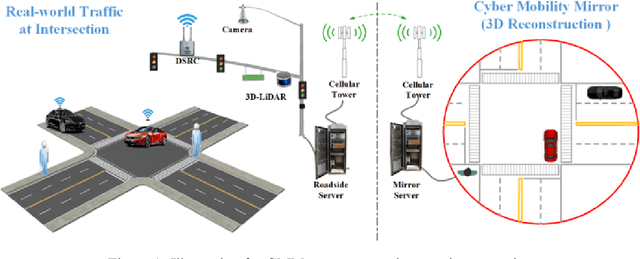
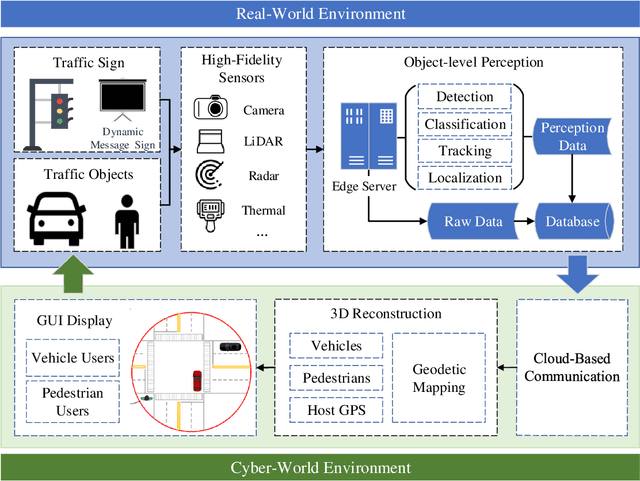
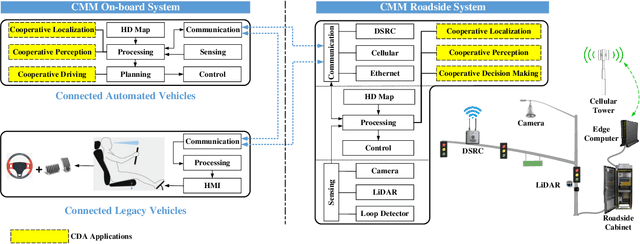
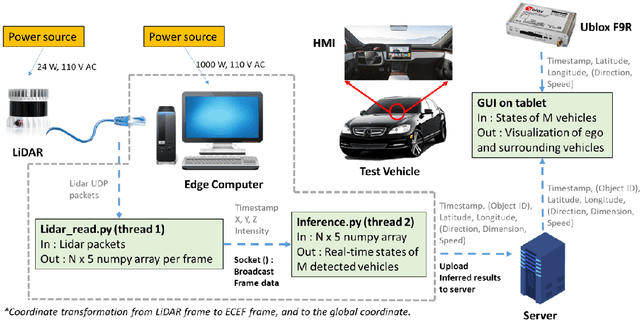
Object perception plays a fundamental role in Cooperative Driving Automation (CDA) which is regarded as a revolutionary promoter for the next-generation transportation systems. However, the vehicle-based perception may suffer from the limited sensing range and occlusion as well as low penetration rates in connectivity. In this paper, we propose Cyber Mobility Mirror (CMM), a next-generation real-time traffic surveillance system for 3D object perception and reconstruction, to explore the potential of roadside sensors for enabling CDA in the real world. The CMM system consists of six main components: 1) the data pre-processor to retrieve and preprocess the raw data; 2) the roadside 3D object detector to generate 3D detection results; 3) the multi-object tracker to identify detected objects; 4) the global locator to map positioning information from the LiDAR coordinate to geographic coordinate using coordinate transformation; 5) the cloud-based communicator to transmit perception information from roadside sensors to equipped vehicles, and 6) the onboard advisor to reconstruct and display the real-time traffic conditions via Graphical User Interface (GUI). In this study, a field-operational system is deployed at a real-world intersection, University Avenue and Iowa Avenue in Riverside, California to assess the feasibility and performance of our CMM system. Results from field tests demonstrate that our CMM prototype system can provide satisfactory perception performance with 96.99% precision and 83.62% recall. High-fidelity real-time traffic conditions (at the object level) can be geo-localized with an average error of 0.14m and displayed on the GUI of the equipped vehicle with a frequency of 3-4 Hz.
Evaluating Cybersecurity Risks of Cooperative Ramp Merging in Mixed Traffic Environments
Nov 18, 2021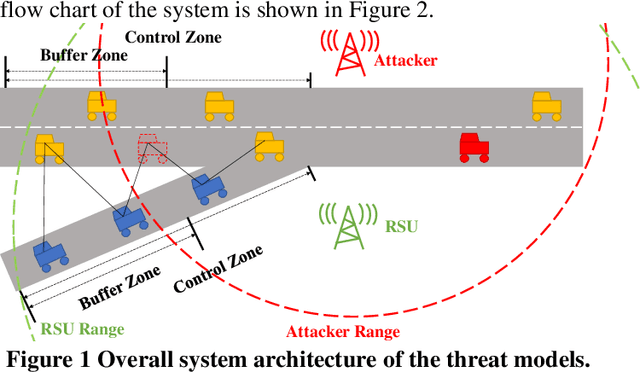
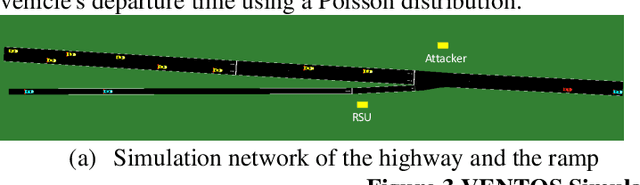
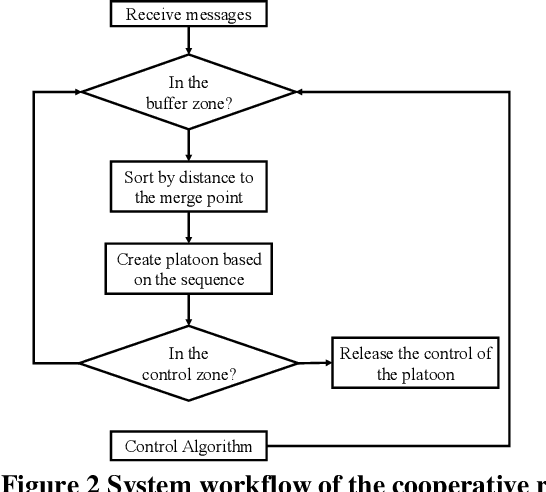
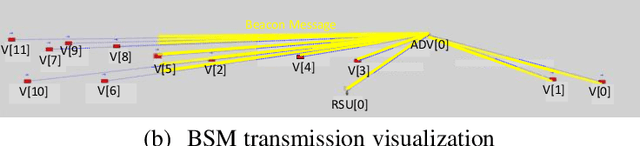
Connected and Automated Vehicle (CAV) technology has the potential to greatly improve transportation mobility, safety, and energy efficiency. However, ubiquitous vehicular connectivity also opens up the door for cyber-attacks. In this study, we investigate cybersecurity risks of a representative cooperative traffic management application, i.e., highway on-ramp merging, in a mixed traffic environment. We develop threat models with two trajectory spoofing strategies on CAVs to create traffic congestion, and we also devise an attack-resilient strategy for system defense. Furthermore, we leverage VENTOS, a Veins extension simulator made for CAV applications, to evaluate cybersecurity risks of the attacks and performance of the proposed defense strategy. A comprehensive case study is conducted across different traffic congestion levels, penetration rates of CAVs, and attack ratios. As expected, the results show that the performance of mobility decreases up to 55.19% at the worst case when the attack ratio increases, as does safety and energy. With our proposed mitigation defense algorithm, the system's cyber-attack resiliency is greatly improved.