 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeERNIE 5.0 Technical Report
Feb 04, 2026In this report, we introduce ERNIE 5.0, a natively autoregressive foundation model desinged for unified multimodal understanding and generation across text, image, video, and audio. All modalities are trained from scratch under a unified next-group-of-tokens prediction objective, based on an ultra-sparse mixture-of-experts (MoE) architecture with modality-agnostic expert routing. To address practical challenges in large-scale deployment under diverse resource constraints, ERNIE 5.0 adopts a novel elastic training paradigm. Within a single pre-training run, the model learns a family of sub-models with varying depths, expert capacities, and routing sparsity, enabling flexible trade-offs among performance, model size, and inference latency in memory- or time-constrained scenarios. Moreover, we systematically address the challenges of scaling reinforcement learning to unified foundation models, thereby guaranteeing efficient and stable post-training under ultra-sparse MoE architectures and diverse multimodal settings. Extensive experiments demonstrate that ERNIE 5.0 achieves strong and balanced performance across multiple modalities. To the best of our knowledge, among publicly disclosed models, ERNIE 5.0 represents the first production-scale realization of a trillion-parameter unified autoregressive model that supports both multimodal understanding and generation. To facilitate further research, we present detailed visualizations of modality-agnostic expert routing in the unified model, alongside comprehensive empirical analysis of elastic training, aiming to offer profound insights to the community.
A Novel Sample-efficient Deep Reinforcement Learning with Episodic Policy Transfer for PID-Based Control in Cardiac Catheterization Robots
Oct 28, 2021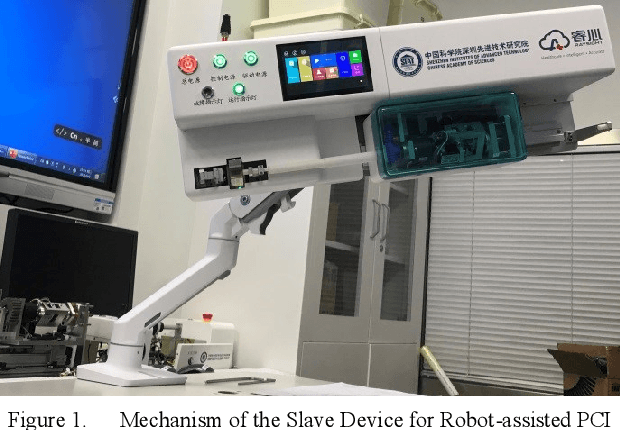
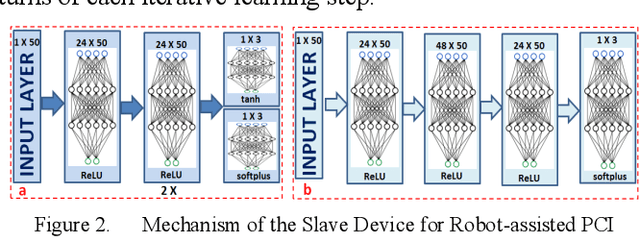
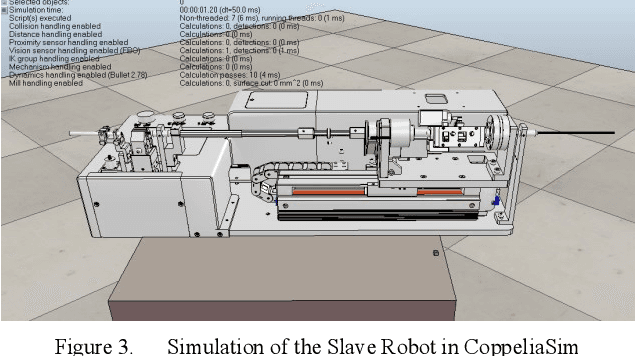
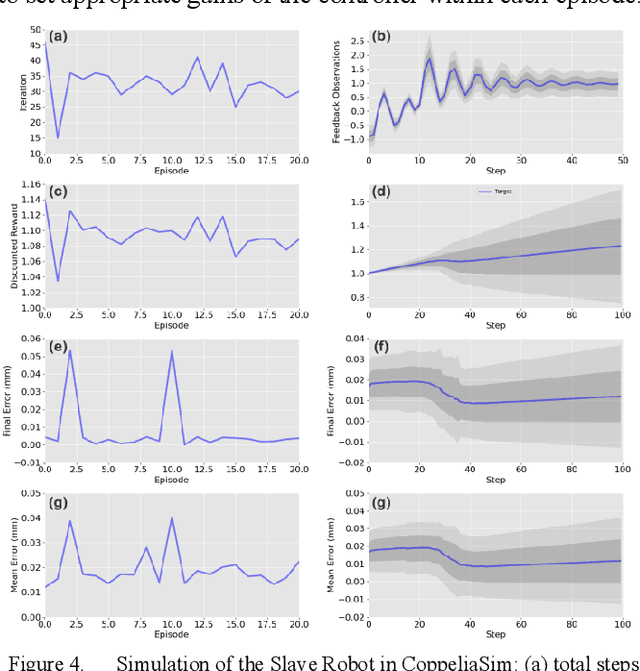
Robotic catheterization is typically used for percutaneous coronary intervention procedures nowadays and it involves steering flexible endovascular tools to open up occlusion in the coronaries. In this study, a sample-efficient deep reinforcement learning with episodic policy transfer is, for the first time, used for motion control during robotic catheterization with fully adaptive PID tuning strategy. The reinforcement model aids the agent to continuously learn from its interactions in its environment and adaptively tune PID control gains for axial navigation of endovascular tool. The model was validated for axial motion control of a robotic system designed for intravascular catheterization. Simulation and experimental trials were done to validate the application of the model, and results obtained shows it could self-tune PID gains appropriately for motion control of a robotic catheter system. Performance comparison with conventional methods in average of 10 trials shows the agent tunes the gain better with error of 0.003 mm. Thus, the proposed model would offer more stable set-point motion control robotic catheterization.
Exploration of Surgeons' Natural Skills for Robotic Catheterization
Mar 06, 2020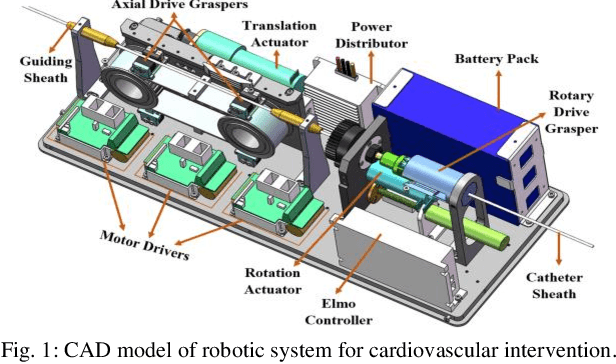
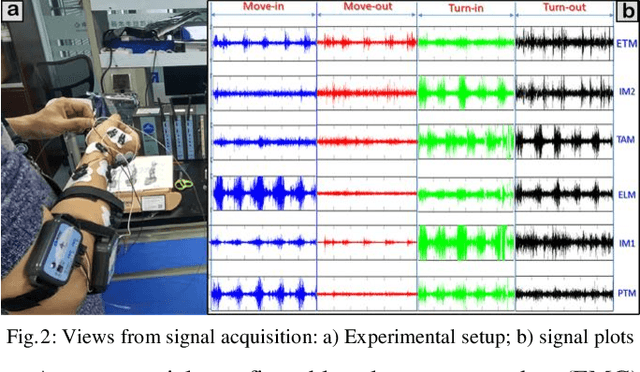
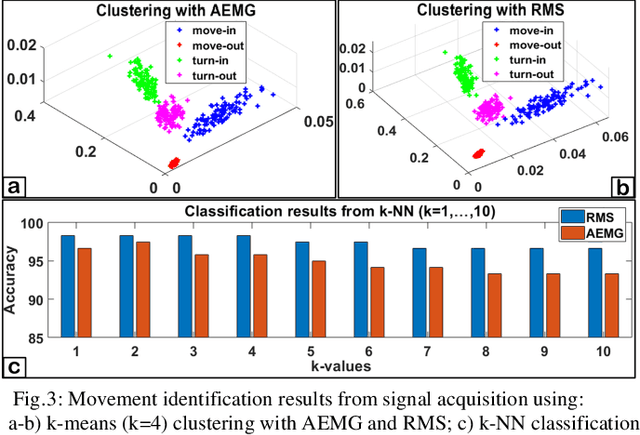
Despite having the robotic catheter systems which have recently emerged as safe way of performing cardiovascular interventions, a number of important challenges are yet to be investigated. One of them is exploration of surgeons' natural skills during vascular catheterization with robotic systems. In this study, surgeons' natural hand motions were investigated for identification of four basic movements used for intravascular catheterization. Controlled experiment was setup to acquire surface electromyography (sEMG) signals from six muscles that are innervated when a subject with catheterization skills made the four movements in open settings. k-means and k-NN models were implemented over average EMG and root means square features to uniquely identify the movements. The result shows great potentials of sEMG analysis towards designing intelligent cyborg control for safe and efficient robotic catheterization.