 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakly-Supervised Learning via Multi-Lateral Decoder Branching for Guidewire Segmentation in Robot-Assisted Cardiovascular Catheterization
Apr 11, 2024Although robot-assisted cardiovascular catheterization is commonly performed for intervention of cardiovascular diseases, more studies are needed to support the procedure with automated tool segmentation. This can aid surgeons on tool tracking and visualization during intervention. Learning-based segmentation has recently offered state-of-the-art segmentation performances however, generating ground-truth signals for fully-supervised methods is labor-intensive and time consuming for the interventionists. In this study, a weakly-supervised learning method with multi-lateral pseudo labeling is proposed for tool segmentation in cardiac angiograms. The method includes a modified U-Net model with one encoder and multiple lateral-branched decoders that produce pseudo labels as supervision signals under different perturbation. The pseudo labels are self-generated through a mixed loss function and shared consistency in the decoders. We trained the model end-to-end with weakly-annotated data obtained during robotic cardiac catheterization. Experiments with the proposed model shows weakly annotated data has closer performance to when fully annotated data is used. Compared to three existing weakly-supervised methods, our approach yielded higher segmentation performance across three different cardiac angiogram data. With ablation study, we showed consistent performance under different parameters. Thus, we offer a less expensive method for real-time tool segmentation and tracking during robot-assisted cardiac catheterization.
A Novel Sample-efficient Deep Reinforcement Learning with Episodic Policy Transfer for PID-Based Control in Cardiac Catheterization Robots
Oct 28, 2021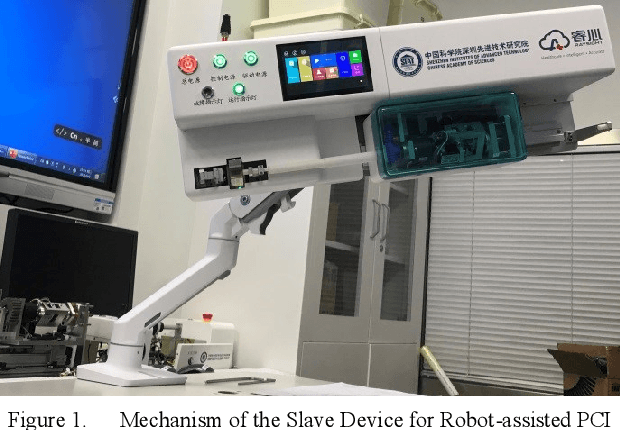
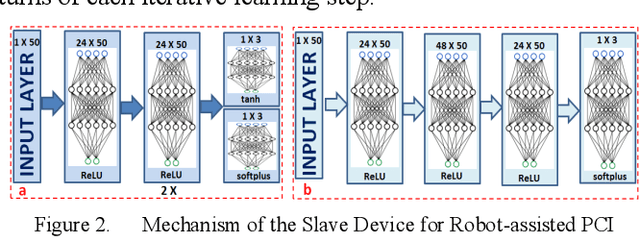
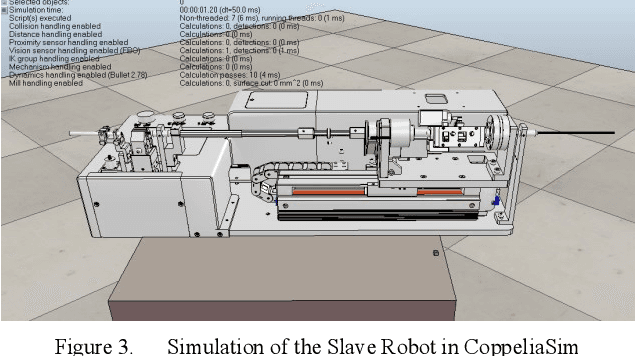
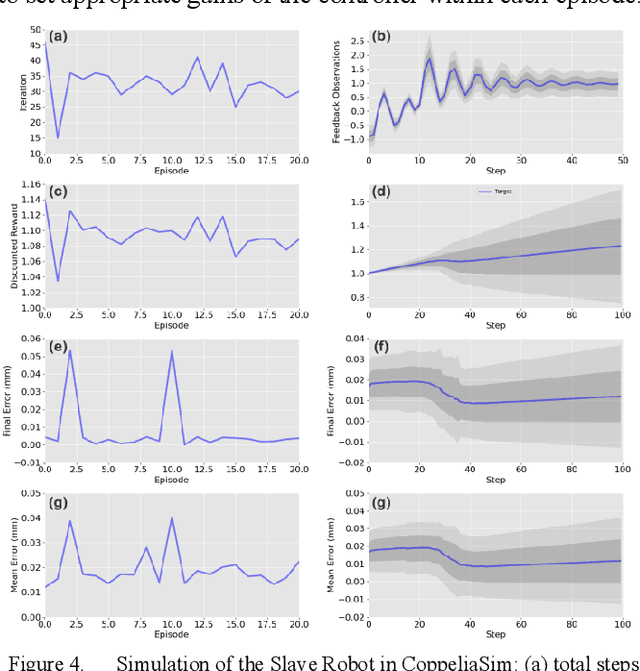
Robotic catheterization is typically used for percutaneous coronary intervention procedures nowadays and it involves steering flexible endovascular tools to open up occlusion in the coronaries. In this study, a sample-efficient deep reinforcement learning with episodic policy transfer is, for the first time, used for motion control during robotic catheterization with fully adaptive PID tuning strategy. The reinforcement model aids the agent to continuously learn from its interactions in its environment and adaptively tune PID control gains for axial navigation of endovascular tool. The model was validated for axial motion control of a robotic system designed for intravascular catheterization. Simulation and experimental trials were done to validate the application of the model, and results obtained shows it could self-tune PID gains appropriately for motion control of a robotic catheter system. Performance comparison with conventional methods in average of 10 trials shows the agent tunes the gain better with error of 0.003 mm. Thus, the proposed model would offer more stable set-point motion control robotic catheterization.