 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRVS: a Generalizable and Recurrent Approach to Monocular Dynamic View Synthesis
Mar 31, 2026Synthesizing novel views from monocular videos of dynamic scenes remains a challenging problem. Scene-specific methods that optimize 4D representations with explicit motion priors often break down in highly dynamic regions where multi-view information is hard to exploit. Diffusion-based approaches that integrate camera control into large pre-trained models can produce visually plausible videos but frequently suffer from geometric inconsistencies across both static and dynamic areas. Both families of methods also require substantial computational resources. Building on the success of generalizable models for static novel view synthesis, we adapt the framework to dynamic inputs and propose a new model with two key components: (1) a recurrent loop that enables unbounded and asynchronous mapping between input and target videos and (2) an efficient use of plane sweeps over dynamic inputs to disentangle camera and scene motion, and achieve fine-grained, six-degrees-of-freedom camera controls. We train and evaluate our model on the UCSD dataset and on Kubric-4D-dyn, a new monocular dynamic dataset featuring longer, higher resolution sequences with more complex scene dynamics than existing alternatives. Our model outperforms four Gaussian Splatting-based scene-specific approaches, as well as two diffusion-based approaches in reconstructing fine-grained geometric details across both static and dynamic regions.
Off The Grid: Detection of Primitives for Feed-Forward 3D Gaussian Splatting
Dec 17, 2025



Feed-forward 3D Gaussian Splatting (3DGS) models enable real-time scene generation but are hindered by suboptimal pixel-aligned primitive placement, which relies on a dense, rigid grid and limits both quality and efficiency. We introduce a new feed-forward architecture that detects 3D Gaussian primitives at a sub-pixel level, replacing the pixel grid with an adaptive, "Off The Grid" distribution. Inspired by keypoint detection, our multi-resolution decoder learns to distribute primitives across image patches. This module is trained end-to-end with a 3D reconstruction backbone using self-supervised learning. Our resulting pose-free model generates photorealistic scenes in seconds, achieving state-of-the-art novel view synthesis for feed-forward models. It outperforms competitors while using far fewer primitives, demonstrating a more accurate and efficient allocation that captures fine details and reduces artifacts. Moreover, we observe that by learning to render 3D Gaussians, our 3D reconstruction backbone improves camera pose estimation, suggesting opportunities to train these foundational models without labels.
Charge: A Comprehensive Novel View Synthesis Benchmark and Dataset to Bind Them All
Dec 15, 2025This paper presents a new dataset for Novel View Synthesis, generated from a high-quality, animated film with stunning realism and intricate detail. Our dataset captures a variety of dynamic scenes, complete with detailed textures, lighting, and motion, making it ideal for training and evaluating cutting-edge 4D scene reconstruction and novel view generation models. In addition to high-fidelity RGB images, we provide multiple complementary modalities, including depth, surface normals, object segmentation and optical flow, enabling a deeper understanding of scene geometry and motion. The dataset is organised into three distinct benchmarking scenarios: a dense multi-view camera setup, a sparse camera arrangement, and monocular video sequences, enabling a wide range of experimentation and comparison across varying levels of data sparsity. With its combination of visual richness, high-quality annotations, and diverse experimental setups, this dataset offers a unique resource for pushing the boundaries of view synthesis and 3D vision.
ViDAR: Video Diffusion-Aware 4D Reconstruction From Monocular Inputs
Jun 23, 2025



Dynamic Novel View Synthesis aims to generate photorealistic views of moving subjects from arbitrary viewpoints. This task is particularly challenging when relying on monocular video, where disentangling structure from motion is ill-posed and supervision is scarce. We introduce Video Diffusion-Aware Reconstruction (ViDAR), a novel 4D reconstruction framework that leverages personalised diffusion models to synthesise a pseudo multi-view supervision signal for training a Gaussian splatting representation. By conditioning on scene-specific features, ViDAR recovers fine-grained appearance details while mitigating artefacts introduced by monocular ambiguity. To address the spatio-temporal inconsistency of diffusion-based supervision, we propose a diffusion-aware loss function and a camera pose optimisation strategy that aligns synthetic views with the underlying scene geometry. Experiments on DyCheck, a challenging benchmark with extreme viewpoint variation, show that ViDAR outperforms all state-of-the-art baselines in visual quality and geometric consistency. We further highlight ViDAR's strong improvement over baselines on dynamic regions and provide a new benchmark to compare performance in reconstructing motion-rich parts of the scene. Project page: https://vidar-4d.github.io
Better Together: Unified Motion Capture and 3D Avatar Reconstruction
Mar 12, 2025We present Better Together, a method that simultaneously solves the human pose estimation problem while reconstructing a photorealistic 3D human avatar from multi-view videos. While prior art usually solves these problems separately, we argue that joint optimization of skeletal motion with a 3D renderable body model brings synergistic effects, i.e. yields more precise motion capture and improved visual quality of real-time rendering of avatars. To achieve this, we introduce a novel animatable avatar with 3D Gaussians rigged on a personalized mesh and propose to optimize the motion sequence with time-dependent MLPs that provide accurate and temporally consistent pose estimates. We first evaluate our method on highly challenging yoga poses and demonstrate state-of-the-art accuracy on multi-view human pose estimation, reducing error by 35% on body joints and 45% on hand joints compared to keypoint-based methods. At the same time, our method significantly boosts the visual quality of animatable avatars (+2dB PSNR on novel view synthesis) on diverse challenging subjects.
Global Latent Neural Rendering
Dec 13, 2023



A recent trend among generalizable novel view synthesis methods is to learn a rendering operator acting over single camera rays. This approach is promising because it removes the need for explicit volumetric rendering, but it effectively treats target images as collections of independent pixels. Here, we propose to learn a global rendering operator acting over all camera rays jointly. We show that the right representation to enable such rendering is the 5-dimensional plane sweep volume, consisting of the projection of the input images on a set of planes facing the target camera. Based on this understanding, we introduce our Convolutional Global Latent Renderer (ConvGLR), an efficient convolutional architecture that performs the rendering operation globally in a low-resolution latent space. Experiments on various datasets under sparse and generalizable setups show that our approach consistently outperforms existing methods by significant margins.
Efficient View Synthesis and 3D-based Multi-Frame Denoising with Multiplane Feature Representations
Apr 05, 2023



While current multi-frame restoration methods combine information from multiple input images using 2D alignment techniques, recent advances in novel view synthesis are paving the way for a new paradigm relying on volumetric scene representations. In this work, we introduce the first 3D-based multi-frame denoising method that significantly outperforms its 2D-based counterparts with lower computational requirements. Our method extends the multiplane image (MPI) framework for novel view synthesis by introducing a learnable encoder-renderer pair manipulating multiplane representations in feature space. The encoder fuses information across views and operates in a depth-wise manner while the renderer fuses information across depths and operates in a view-wise manner. The two modules are trained end-to-end and learn to separate depths in an unsupervised way, giving rise to Multiplane Feature (MPF) representations. Experiments on the Spaces and Real Forward-Facing datasets as well as on raw burst data validate our approach for view synthesis, multi-frame denoising, and view synthesis under noisy conditions.
Tunable Convolutions with Parametric Multi-Loss Optimization
Apr 03, 2023Behavior of neural networks is irremediably determined by the specific loss and data used during training. However it is often desirable to tune the model at inference time based on external factors such as preferences of the user or dynamic characteristics of the data. This is especially important to balance the perception-distortion trade-off of ill-posed image-to-image translation tasks. In this work, we propose to optimize a parametric tunable convolutional layer, which includes a number of different kernels, using a parametric multi-loss, which includes an equal number of objectives. Our key insight is to use a shared set of parameters to dynamically interpolate both the objectives and the kernels. During training, these parameters are sampled at random to explicitly optimize all possible combinations of objectives and consequently disentangle their effect into the corresponding kernels. During inference, these parameters become interactive inputs of the model hence enabling reliable and consistent control over the model behavior. Extensive experimental results demonstrate that our tunable convolutions effectively work as a drop-in replacement for traditional convolutions in existing neural networks at virtually no extra computational cost, outperforming state-of-the-art control strategies in a wide range of applications; including image denoising, deblurring, super-resolution, and style transfer.
FlexHDR: Modelling Alignment and Exposure Uncertainties for Flexible HDR Imaging
Jan 07, 2022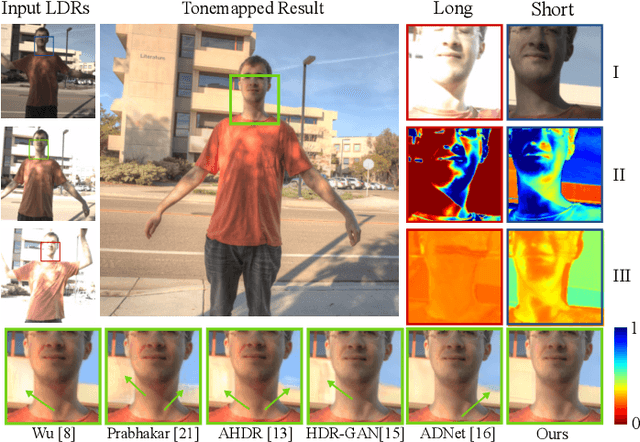
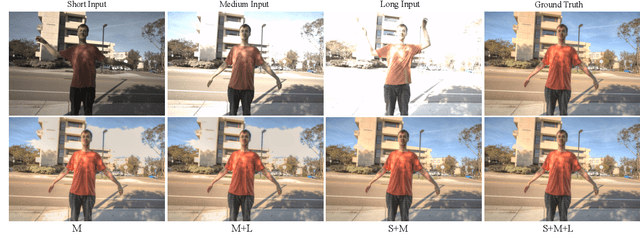
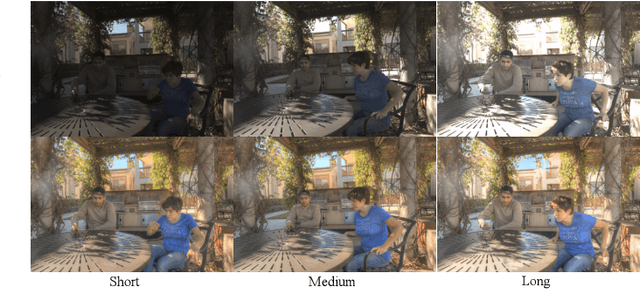
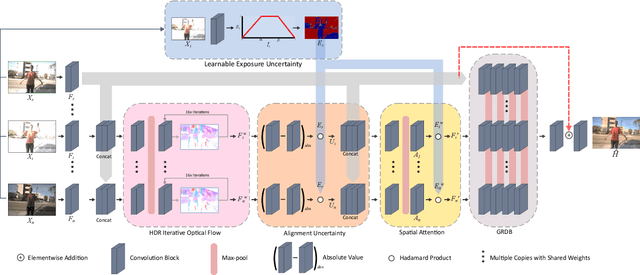
High dynamic range (HDR) imaging is of fundamental importance in modern digital photography pipelines and used to produce a high-quality photograph with well exposed regions despite varying illumination across the image. This is typically achieved by merging multiple low dynamic range (LDR) images taken at different exposures. However, over-exposed regions and misalignment errors due to poorly compensated motion result in artefacts such as ghosting. In this paper, we present a new HDR imaging technique that specifically models alignment and exposure uncertainties to produce high quality HDR results. We introduce a strategy that learns to jointly align and assess the alignment and exposure reliability using an HDR-aware, uncertainty-driven attention map that robustly merges the frames into a single high quality HDR image. Further, we introduce a progressive, multi-stage image fusion approach that can flexibly merge any number of LDR images in a permutation-invariant manner. Experimental results show our method can produce better quality HDR images with up to 0.8dB PSNR improvement to the state-of-the-art, and subjective improvements in terms of better detail, colours, and fewer artefacts.
NTIRE 2021 Challenge on Quality Enhancement of Compressed Video: Methods and Results
May 02, 2021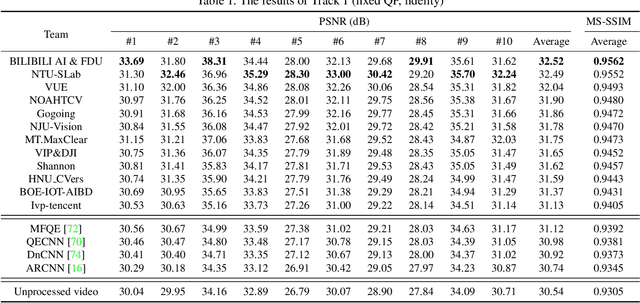
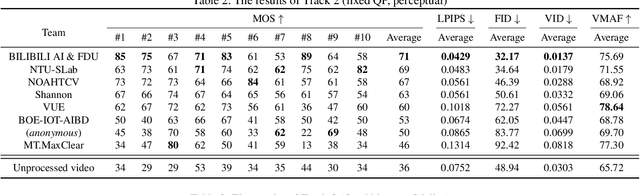
This paper reviews the first NTIRE challenge on quality enhancement of compressed video, with a focus on the proposed methods and results. In this challenge, the new Large-scale Diverse Video (LDV) dataset is employed. The challenge has three tracks. Tracks 1 and 2 aim at enhancing the videos compressed by HEVC at a fixed QP, while Track 3 is designed for enhancing the videos compressed by x265 at a fixed bit-rate. Besides, the quality enhancement of Tracks 1 and 3 targets at improving the fidelity (PSNR), and Track 2 targets at enhancing the perceptual quality. The three tracks totally attract 482 registrations. In the test phase, 12 teams, 8 teams and 11 teams submitted the final results of Tracks 1, 2 and 3, respectively. The proposed methods and solutions gauge the state-of-the-art of video quality enhancement. The homepage of the challenge: https://github.com/RenYang-home/NTIRE21_VEnh