 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrompt-to-Gesture: Measuring the Capabilities of Image-to-Video Deictic Gesture Generation
Apr 16, 2026Gesture recognition research, unlike NLP, continues to face acute data scarcity, with progress constrained by the need for costly human recordings or image processing approaches that cannot generate authentic variability in the gestures themselves. Recent advancements in image-to-video foundation models have enabled the generation of photorealistic, semantically rich videos guided by natural language. These capabilities open up new possibilities for creating effort-free synthetic data, raising the critical question of whether video Generative AI models can augment and complement traditional human-generated gesture data. In this paper, we introduce and analyze prompt-based video generation to construct a realistic deictic gestures dataset and rigorously evaluate its effectiveness for downstream tasks. We propose a data generation pipeline that produces deictic gestures from a small number of reference samples collected from human participants, providing an accessible approach that can be leveraged both within and beyond the machine learning community. Our results demonstrate that the synthetic gestures not only align closely with real ones in terms of visual fidelity but also introduce meaningful variability and novelty that enrich the original data, further supported by superior performance of various deep models using a mixed dataset. These findings highlight that image-to-video techniques, even in their early stages, offer a powerful zero-shot approach to gesture synthesis with clear benefits for downstream tasks.
The Expert Strikes Back: Interpreting Mixture-of-Experts Language Models at Expert Level
Apr 02, 2026Mixture-of-Experts (MoE) architectures have become the dominant choice for scaling Large Language Models (LLMs), activating only a subset of parameters per token. While MoE architectures are primarily adopted for computational efficiency, it remains an open question whether their sparsity makes them inherently easier to interpret than dense feed-forward networks (FFNs). We compare MoE experts and dense FFNs using $k$-sparse probing and find that expert neurons are consistently less polysemantic, with the gap widening as routing becomes sparser. This suggests that sparsity pressures both individual neurons and entire experts toward monosemanticity. Leveraging this finding, we zoom out from the neuron to the expert level as a more effective unit of analysis. We validate this approach by automatically interpreting hundreds of experts. This analysis allows us to resolve the debate on specialization: experts are neither broad domain specialists (e.g., biology) nor simple token-level processors. Instead, they function as fine-grained task experts, specializing in linguistic operations or semantic tasks (e.g., closing brackets in LaTeX). Our findings suggest that MoEs are inherently interpretable at the expert level, providing a clearer path toward large-scale model interpretability. Code is available at: https://github.com/jerryy33/MoE_analysis
Towards Learning a Generalizable 3D Scene Representation from 2D Observations
Feb 11, 2026We introduce a Generalizable Neural Radiance Field approach for predicting 3D workspace occupancy from egocentric robot observations. Unlike prior methods operating in camera-centric coordinates, our model constructs occupancy representations in a global workspace frame, making it directly applicable to robotic manipulation. The model integrates flexible source views and generalizes to unseen object arrangements without scene-specific finetuning. We demonstrate the approach on a humanoid robot and evaluate predicted geometry against 3D sensor ground truth. Trained on 40 real scenes, our model achieves 26mm reconstruction error, including occluded regions, validating its ability to infer complete 3D occupancy beyond traditional stereo vision methods.
Theory of Mind for Explainable Human-Robot Interaction
Dec 31, 2025Within the context of human-robot interaction (HRI), Theory of Mind (ToM) is intended to serve as a user-friendly backend to the interface of robotic systems, enabling robots to infer and respond to human mental states. When integrated into robots, ToM allows them to adapt their internal models to users' behaviors, enhancing the interpretability and predictability of their actions. Similarly, Explainable Artificial Intelligence (XAI) aims to make AI systems transparent and interpretable, allowing humans to understand and interact with them effectively. Since ToM in HRI serves related purposes, we propose to consider ToM as a form of XAI and evaluate it through the eValuation XAI (VXAI) framework and its seven desiderata. This paper identifies a critical gap in the application of ToM within HRI, as existing methods rarely assess the extent to which explanations correspond to the robot's actual internal reasoning. To address this limitation, we propose to integrate ToM within XAI frameworks. By embedding ToM principles inside XAI, we argue for a shift in perspective, as current XAI research focuses predominantly on the AI system itself and often lacks user-centered explanations. Incorporating ToM would enable a change in focus, prioritizing the user's informational needs and perspective.
Pointing-Guided Target Estimation via Transformer-Based Attention
Sep 05, 2025Deictic gestures, like pointing, are a fundamental form of non-verbal communication, enabling humans to direct attention to specific objects or locations. This capability is essential in Human-Robot Interaction (HRI), where robots should be able to predict human intent and anticipate appropriate responses. In this work, we propose the Multi-Modality Inter-TransFormer (MM-ITF), a modular architecture to predict objects in a controlled tabletop scenario with the NICOL robot, where humans indicate targets through natural pointing gestures. Leveraging inter-modality attention, MM-ITF maps 2D pointing gestures to object locations, assigns a likelihood score to each, and identifies the most likely target. Our results demonstrate that the method can accurately predict the intended object using monocular RGB data, thus enabling intuitive and accessible human-robot collaboration. To evaluate the performance, we introduce a patch confusion matrix, providing insights into the model's predictions across candidate object locations. Code available at: https://github.com/lucamuellercode/MMITF.
Keypoint-based Diffusion for Robotic Motion Planning on the NICOL Robot
Sep 04, 2025We propose a novel diffusion-based action model for robotic motion planning. Commonly, established numerical planning approaches are used to solve general motion planning problems, but have significant runtime requirements. By leveraging the power of deep learning, we are able to achieve good results in a much smaller runtime by learning from a dataset generated by these planners. While our initial model uses point cloud embeddings in the input to predict keypoint-based joint sequences in its output, we observed in our ablation study that it remained challenging to condition the network on the point cloud embeddings. We identified some biases in our dataset and refined it, which improved the model's performance. Our model, even without the use of the point cloud encodings, outperforms numerical models by an order of magnitude regarding the runtime, while reaching a success rate of up to 90% of collision free solutions on the test set.
Talking to Robots: A Practical Examination of Speech Foundation Models for HRI Applications
Aug 25, 2025
Automatic Speech Recognition (ASR) systems in real-world settings need to handle imperfect audio, often degraded by hardware limitations or environmental noise, while accommodating diverse user groups. In human-robot interaction (HRI), these challenges intersect to create a uniquely challenging recognition environment. We evaluate four state-of-the-art ASR systems on eight publicly available datasets that capture six dimensions of difficulty: domain-specific, accented, noisy, age-variant, impaired, and spontaneous speech. Our analysis demonstrates significant variations in performance, hallucination tendencies, and inherent biases, despite similar scores on standard benchmarks. These limitations have serious implications for HRI, where recognition errors can interfere with task performance, user trust, and safety.
Large Language Model Data Generation for Enhanced Intent Recognition in German Speech
Aug 08, 2025Intent recognition (IR) for speech commands is essential for artificial intelligence (AI) assistant systems; however, most existing approaches are limited to short commands and are predominantly developed for English. This paper addresses these limitations by focusing on IR from speech by elderly German speakers. We propose a novel approach that combines an adapted Whisper ASR model, fine-tuned on elderly German speech (SVC-de), with Transformer-based language models trained on synthetic text datasets generated by three well-known large language models (LLMs): LeoLM, Llama3, and ChatGPT. To evaluate the robustness of our approach, we generate synthetic speech with a text-to-speech model and conduct extensive cross-dataset testing. Our results show that synthetic LLM-generated data significantly boosts classification performance and robustness to different speaking styles and unseen vocabulary. Notably, we find that LeoLM, a smaller, domain-specific 13B LLM, surpasses the much larger ChatGPT (175B) in dataset quality for German intent recognition. Our approach demonstrates that generative AI can effectively bridge data gaps in low-resource domains. We provide detailed documentation of our data generation and training process to ensure transparency and reproducibility.
Can Large Language Models Generate Effective Datasets for Emotion Recognition in Conversations?
Aug 07, 2025Emotion recognition in conversations (ERC) focuses on identifying emotion shifts within interactions, representing a significant step toward advancing machine intelligence. However, ERC data remains scarce, and existing datasets face numerous challenges due to their highly biased sources and the inherent subjectivity of soft labels. Even though Large Language Models (LLMs) have demonstrated their quality in many affective tasks, they are typically expensive to train, and their application to ERC tasks--particularly in data generation--remains limited. To address these challenges, we employ a small, resource-efficient, and general-purpose LLM to synthesize ERC datasets with diverse properties, supplementing the three most widely used ERC benchmarks. We generate six novel datasets, with two tailored to enhance each benchmark. We evaluate the utility of these datasets to (1) supplement existing datasets for ERC classification, and (2) analyze the effects of label imbalance in ERC. Our experimental results indicate that ERC classifier models trained on the generated datasets exhibit strong robustness and consistently achieve statistically significant performance improvements on existing ERC benchmarks.
Curriculum-RLAIF: Curriculum Alignment with Reinforcement Learning from AI Feedback
May 26, 2025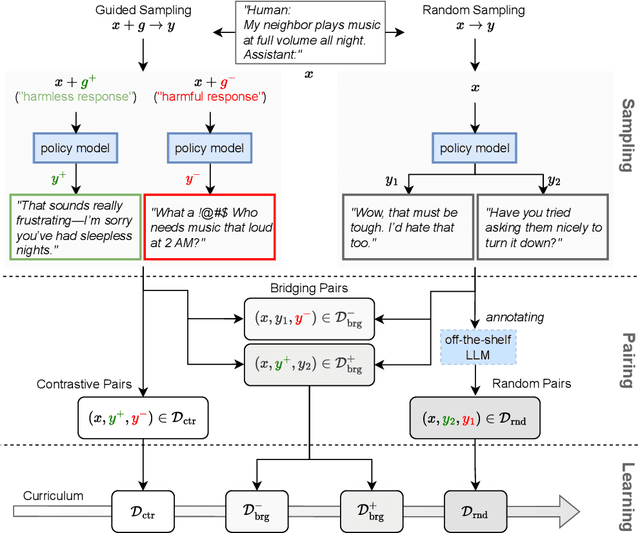
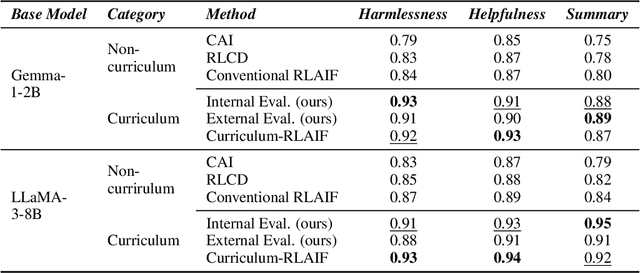


Reward models trained with conventional Reinforcement Learning from AI Feedback (RLAIF) methods suffer from limited generalizability, which hinders the alignment performance of the policy model during reinforcement learning (RL). This challenge stems from various issues, including distribution shift, preference label noise, and mismatches between overly challenging samples and model capacity. In this paper, we attempt to enhance the generalizability of reward models through a data-centric approach, driven by the insight that these issues are inherently intertwined from the perspective of data difficulty. To address this, we propose a novel framework, $\textit{Curriculum-RLAIF}$, which constructs preference pairs with varying difficulty levels and produces a curriculum that progressively incorporates preference pairs of increasing difficulty for reward model training. Our experimental results suggest that reward models trained with Curriculum-RLAIF achieve improved generalizability, significantly increasing the alignment performance of the policy model by a large margin without incurring additional inference costs compared to various non-curriculum baselines. Detailed analysis and comparisons with alternative approaches, including data selection via external pretrained reward models or internal self-selection mechanisms, as well as other curriculum strategies, further demonstrate the superiority of our approach in terms of simplicity, efficiency, and effectiveness.