 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinRpt: Dataset, Evaluation System and LLM-based Multi-agent Framework for Equity Research Report Generation
Nov 11, 2025While LLMs have shown great success in financial tasks like stock prediction and question answering, their application in fully automating Equity Research Report generation remains uncharted territory. In this paper, we formulate the Equity Research Report (ERR) Generation task for the first time. To address the data scarcity and the evaluation metrics absence, we present an open-source evaluation benchmark for ERR generation - FinRpt. We frame a Dataset Construction Pipeline that integrates 7 financial data types and produces a high-quality ERR dataset automatically, which could be used for model training and evaluation. We also introduce a comprehensive evaluation system including 11 metrics to assess the generated ERRs. Moreover, we propose a multi-agent framework specifically tailored to address this task, named FinRpt-Gen, and train several LLM-based agents on the proposed datasets using Supervised Fine-Tuning and Reinforcement Learning. Experimental results indicate the data quality and metrics effectiveness of the benchmark FinRpt and the strong performance of FinRpt-Gen, showcasing their potential to drive innovation in the ERR generation field. All code and datasets are publicly available.
Beyond Static Testbeds: An Interaction-Centric Agent Simulation Platform for Dynamic Recommender Systems
May 22, 2025Evaluating and iterating upon recommender systems is crucial, yet traditional A/B testing is resource-intensive, and offline methods struggle with dynamic user-platform interactions. While agent-based simulation is promising, existing platforms often lack a mechanism for user actions to dynamically reshape the environment. To bridge this gap, we introduce RecInter, a novel agent-based simulation platform for recommender systems featuring a robust interaction mechanism. In RecInter platform, simulated user actions (e.g., likes, reviews, purchases) dynamically update item attributes in real-time, and introduced Merchant Agents can reply, fostering a more realistic and evolving ecosystem. High-fidelity simulation is ensured through Multidimensional User Profiling module, Advanced Agent Architecture, and LLM fine-tuned on Chain-of-Thought (CoT) enriched interaction data. Our platform achieves significantly improved simulation credibility and successfully replicates emergent phenomena like Brand Loyalty and the Matthew Effect. Experiments demonstrate that this interaction mechanism is pivotal for simulating realistic system evolution, establishing our platform as a credible testbed for recommender systems research.
PEER: Expertizing Domain-Specific Tasks with a Multi-Agent Framework and Tuning Methods
Jul 10, 2024



In domain-specific applications, GPT-4, augmented with precise prompts or Retrieval-Augmented Generation (RAG), shows notable potential but faces the critical tri-lemma of performance, cost, and data privacy. High performance requires sophisticated processing techniques, yet managing multiple agents within a complex workflow often proves costly and challenging. To address this, we introduce the PEER (Plan, Execute, Express, Review) multi-agent framework. This systematizes domain-specific tasks by integrating precise question decomposition, advanced information retrieval, comprehensive summarization, and rigorous self-assessment. Given the concerns of cost and data privacy, enterprises are shifting from proprietary models like GPT-4 to custom models, striking a balance between cost, security, and performance. We developed industrial practices leveraging online data and user feedback for efficient model tuning. This study provides best practice guidelines for applying multi-agent systems in domain-specific problem-solving and implementing effective agent tuning strategies. Our empirical studies, particularly in the financial question-answering domain, demonstrate that our approach achieves 95.0% of GPT-4's performance, while effectively managing costs and ensuring data privacy.
Direction and Trajectory Tracking Control for Nonholonomic Spherical Robot by Combining Sliding Mode Controller and Model Prediction Controller
May 27, 2022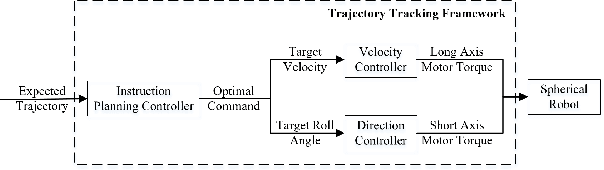
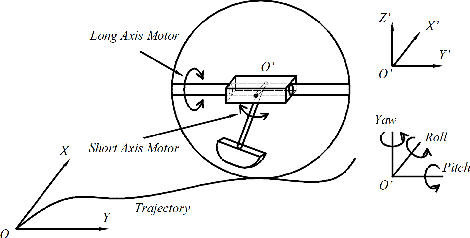
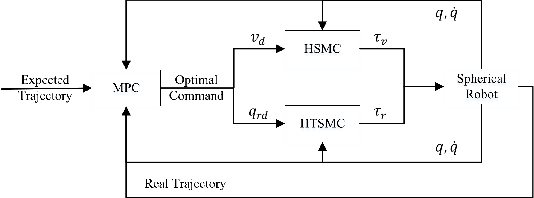
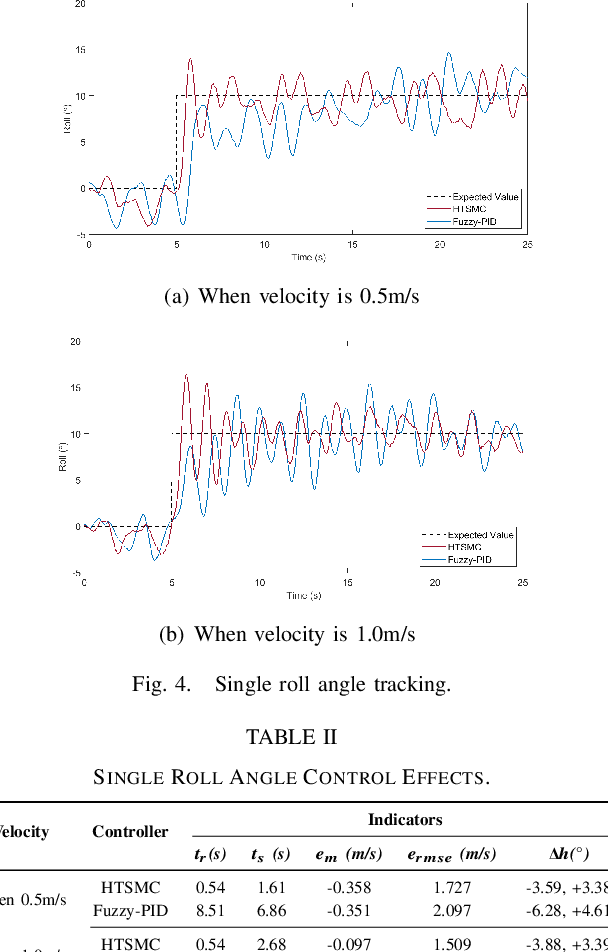
Spherical robot is a nonlinear, nonholonomic and unstable system which increases the difficulty of the direction and trajectory tracking problem. In this study, we propose a new direction controller HTSMC, an instruction planning controller MPC, and a trajectory tracking framework MHH. The HTSMC is designed by integrating a fast terminal algorithm, a hierarchical method, the motion features of a spherical robot, and its dynamics. In addition, the new direction controller has an excellent control effect with a quick response speed and strong stability. MPC can obtain optimal commands that are then transmitted to the velocity and direction controller. Since the two torque controllers in MHH are all Lyapunov-based sliding mode controllers, the MHH framework may achieve optimal control performance while assuring stability. Finally, the two controllers eliminate the requirement for MPC's stability and dynamic constraints. Finally, hardware experiments demonstrate the efficacy of the HTSMC, MPC, and MHH.
Automatic acute ischemic stroke lesion segmentation using semi-supervised learning
Aug 10, 2019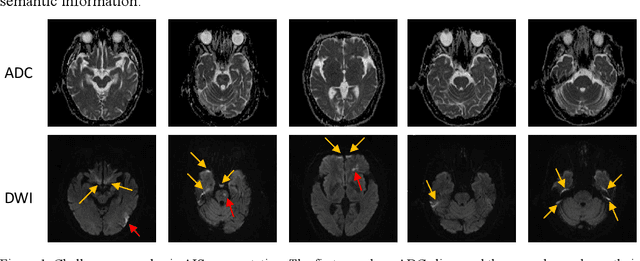
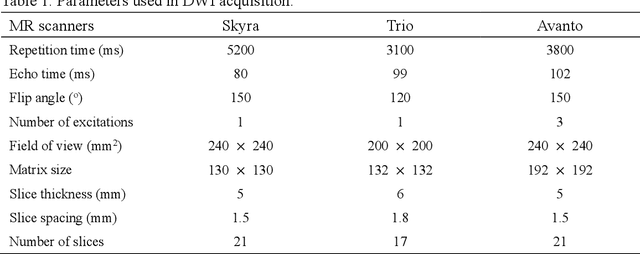
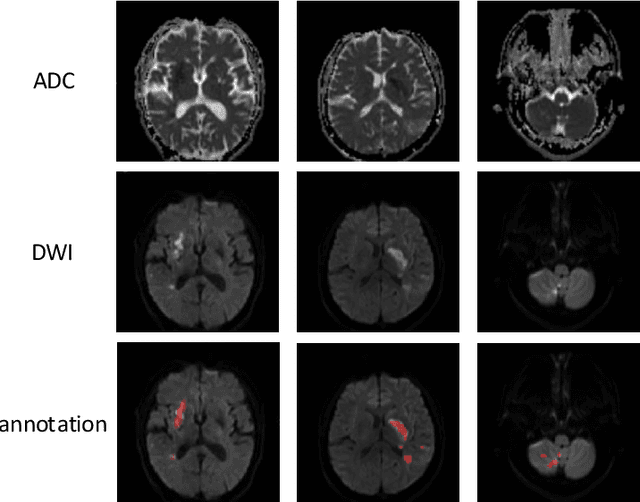
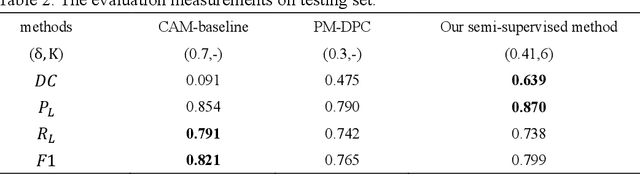
Ischemic stroke is a common disease in the elderly population, which can cause long-term disability and even death. However, the time window for treatment of ischemic stroke in its acute stage is very short. To fast localize and quantitively evaluate the acute ischemic stroke (AIS) lesions, many deep-learning-based lesion segmentation methods have been proposed in the literature, where a deep convolutional neural network (CNN) was trained on hundreds of fully labeled subjects with accurate annotations of AIS lesions. Despite that high segmentation accuracy can be achieved, the accurate labels should be annotated by experienced clinicians, and it is therefore very time-consuming to obtain a large number of fully labeled subjects. In this paper, we propose a semi-supervised method to automatically segment AIS lesions in diffusion weighted images and apparent diffusion coefficient maps. By using a large number of weakly labeled subjects and a small number of fully labeled subjects, our proposed method is able to accurately detect and segment the AIS lesions. In particular, our proposed method consists of three parts: 1) a double-path classification net (DPC-Net) trained in a weakly-supervised way is used to detect the suspicious regions of AIS lesions; 2) a pixel-level K-Means clustering algorithm is used to identify the hyperintensive regions on the DWIs; and 3) a region-growing algorithm combines the outputs of the DPC-Net and the K-Means to obtain the final precise lesion segmentation. In our experiment, we use 460 weakly labeled subjects and 15 fully labeled subjects to train and fine-tune the proposed method. By evaluating on a clinical dataset with 150 fully labeled subjects, our proposed method achieves a mean dice coefficient of 0.639, and a lesion-wise F1 score of 0.799.