 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Model Prediction Control-Based Multi-Terrain Trajectory Tracking Framework for Mobile Spherical Robots
Mar 31, 2023



Owing to uncertainties in both kinematics and dynamics, the current trajectory tracking framework for mobile robots like spherical robots cannot function effectively on multiple terrains, especially uneven and unknown ones. Since this is a prerequisite for robots to execute tasks in the wild, we enhance our previous hierarchical trajectory tracking framework to handle this issue. First, a modified adaptive RBF neural network (RBFNN) is proposed to represent all uncertainties in kinodynamics. Then the Lyapunov function is utilized to design its adaptive law, and a variable step-size algorithm is employed in the weights update procedure to accelerate convergence and improve stability. Hence, a new adaptive model prediction control-based instruction planner (VAN-MPC) is proposed. Without modifying the bottom controllers, we finally develop the multi-terrain trajectory tracking framework by employing the new instruction planner VAN-MPC. The practical experiments demonstrate its effectiveness and robustness.
An MPC-based Optimal Motion Control Framework for Pendulum-driven Spherical Robots
Feb 17, 2023



Motion control is essential for all autonomous mobile robots, and even more so for spherical robots. Due to the uniqueness of the spherical robot, its motion control must not only ensure accurate tracking of the target commands, but also minimize fluctuations in the robot's attitude and motors' current while tracking. In this paper, model predictive control (MPC) is applied to the control of spherical robots and an MPC-based motion control framework is designed. There are two controllers in the framework, an optimal velocity controller ESO-MPC which combines extend states observers (ESO) and MPC, and an optimal orientation controller that uses multilayer perceptron (MLP) to generate accurate trajectories and MPC with changing weights to achieve optimal control. Finally, the performance of individual controllers and the whole control framework are verified by physical experiments. The experimental results show that the MPC-based motion control framework proposed in this work is much better than PID in terms of rapidity and accuracy, and has great advantages over sliding mode controller (SMC) for overshoot, attitude stability, current stability and energy consumption.
Direction and Trajectory Tracking Control for Nonholonomic Spherical Robot by Combining Sliding Mode Controller and Model Prediction Controller
May 27, 2022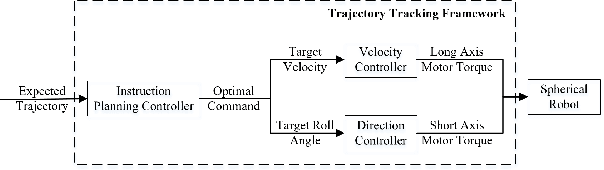
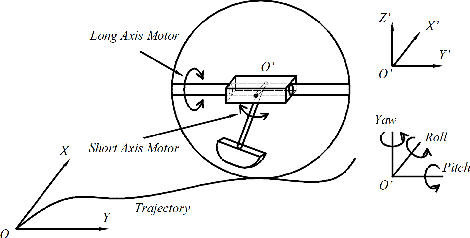
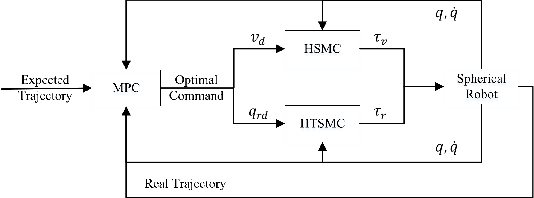
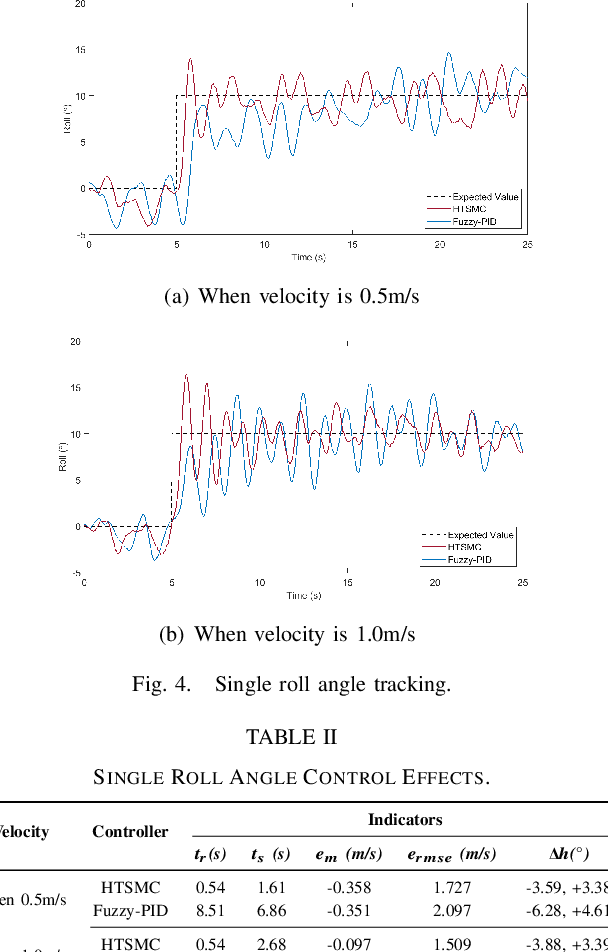
Spherical robot is a nonlinear, nonholonomic and unstable system which increases the difficulty of the direction and trajectory tracking problem. In this study, we propose a new direction controller HTSMC, an instruction planning controller MPC, and a trajectory tracking framework MHH. The HTSMC is designed by integrating a fast terminal algorithm, a hierarchical method, the motion features of a spherical robot, and its dynamics. In addition, the new direction controller has an excellent control effect with a quick response speed and strong stability. MPC can obtain optimal commands that are then transmitted to the velocity and direction controller. Since the two torque controllers in MHH are all Lyapunov-based sliding mode controllers, the MHH framework may achieve optimal control performance while assuring stability. Finally, the two controllers eliminate the requirement for MPC's stability and dynamic constraints. Finally, hardware experiments demonstrate the efficacy of the HTSMC, MPC, and MHH.
Boost AI Power: Data Augmentation Strategies with unlabelled Data and Conformal Prediction, a Case in Alternative Herbal Medicine Discrimination with Electronic Nose
Feb 05, 2021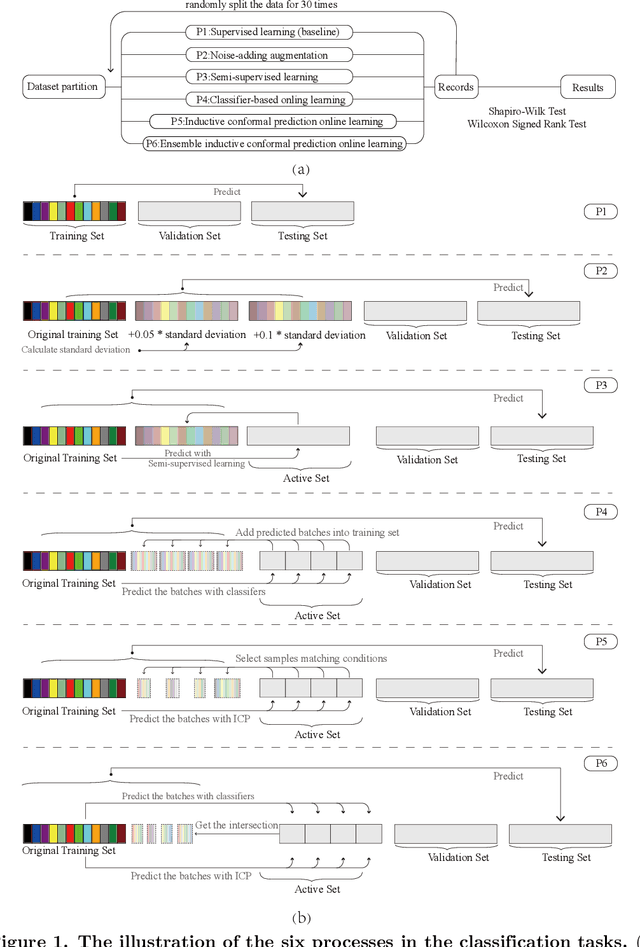
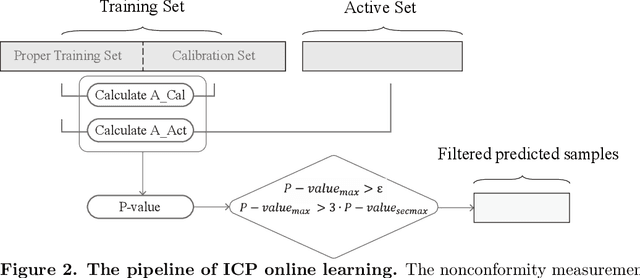
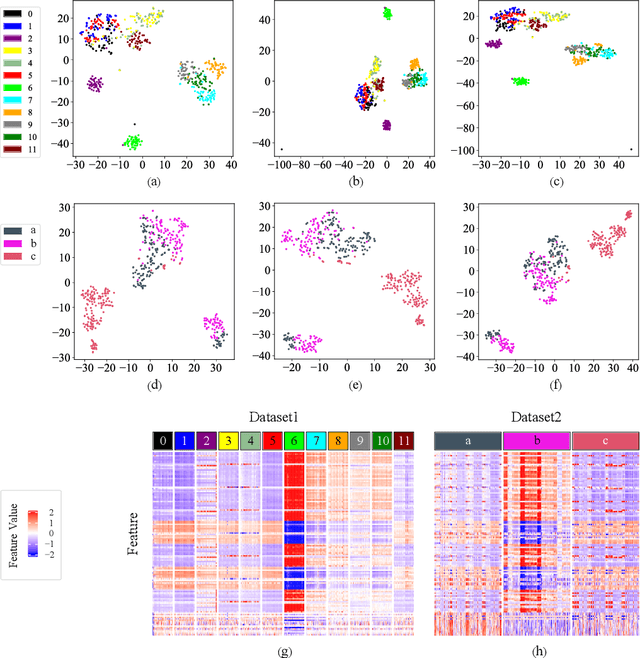
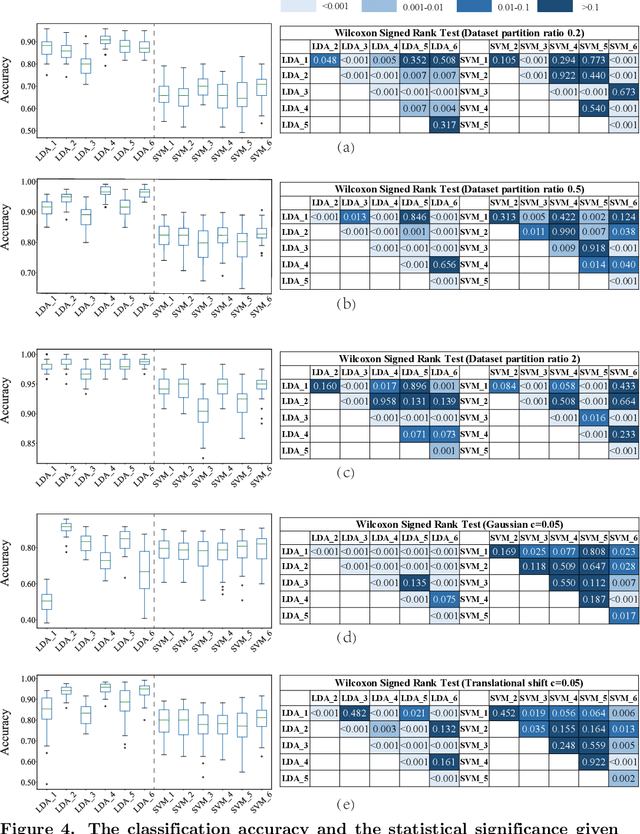
Electronic nose proves its effectiveness in alternativeherbal medicine classification, but due to the supervised learn-ing nature, previous research relies on the labelled training data,which are time-costly and labor-intensive to collect. Consideringthe training data inadequacy in real-world applications, this studyaims to improve classification accuracy via data augmentationstrategies. We stimulated two scenarios to investigate the effective-ness of five data augmentation strategies under different trainingdata inadequacy: in the noise-free scenario, different availability ofunlabelled data were simulated, and in the noisy scenario, differentlevels of Gaussian noises and translational shifts were added tosimulate sensor drifts. The augmentation strategies: noise-addingdata augmentation, semi-supervised learning, classifier-based online learning, inductive conformal prediction (ICP) onlinelearning and the novel ensemble ICP online learning proposed in this study, were compared against supervised learningbaseline, with Linear Discriminant Analysis (LDA) and Support Vector Machine (SVM) as the classifiers. We found thatat least one strategies significantly improved the classification accuracy with LDA(p<=0.05) and showed non-decreasingclassification accuracy with SVM in each tasks. Moreover, our novel strategy: ensemble ICP online learning outperformedthe others by showing non-decreasing classification accuracy on all tasks and significant improvement on most tasks(25/36 tasks,p<=0.05). This study provides a systematic analysis over augmentation strategies, and we provided userswith recommended strategies under specific circumstances. Furthermore, our newly proposed strategy showed botheffectiveness and robustness in boosting the classification model generalizability, which can also be further employed inother machine learning applications.