 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability-Aware Retargeting for Humanoid Multi-Contact Teleoperation
Oct 05, 2025Teleoperation is a powerful method to generate reference motions and enable humanoid robots to perform a broad range of tasks. However, teleoperation becomes challenging when using hand contacts and non-coplanar surfaces, often leading to motor torque saturation or loss of stability through slipping. We propose a centroidal stability-based retargeting method that dynamically adjusts contact points and posture during teleoperation to enhance stability in these difficult scenarios. Central to our approach is an efficient analytical calculation of the stability margin gradient. This gradient is used to identify scenarios for which stability is highly sensitive to teleoperation setpoints and inform the local adjustment of these setpoints. We validate the framework in simulation and hardware by teleoperating manipulation tasks on a humanoid, demonstrating increased stability margins. We also demonstrate empirically that higher stability margins correlate with improved impulse resilience and joint torque margin.
Human-inspired Grasping Strategies of Fresh Fruits and Vegetables Applied to Robotic Manipulation
Oct 30, 2024



Robotic manipulation of fresh fruits and vegetables, including the grasping of multiple loose items, has a strong industrial need but it still is a challenging task for robotic manipulation. This paper outlines the distinctive manipulation strategies used by humans to pick loose fruits and vegetables with the aim to better adopt them for robotic manipulation of diverse items. In this work we present a first version of a robotic setup designed to pick different single or multiple fresh items, featuring multi-fingered compliant robotic gripper. We analyse human grasping strategies from the perspective of industrial Key Performance Indicators (KPIs) used in the logistic sector. The robotic system was validated using the same KPIs, as well as taking into account human performance and strategies. This paper lays the foundation for future development of the robotic demonstrator for fresh fruit and vegetable intelligent manipulation, and outlines the need for generic approaches to handle the complexity of the task.
* *Authors contributed equally
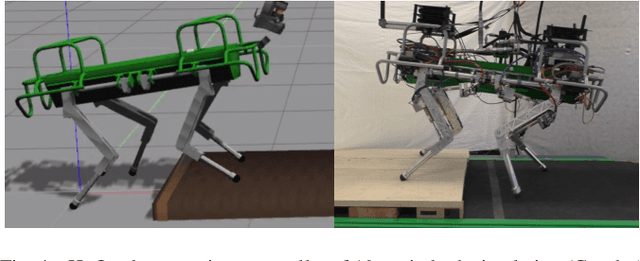
Receding-Horizon Perceptive Trajectory Optimization for Dynamic Legged Locomotion with Learned Initialization
Apr 19, 2021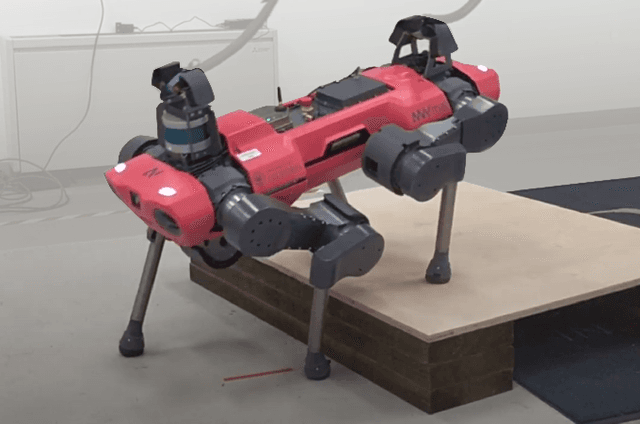
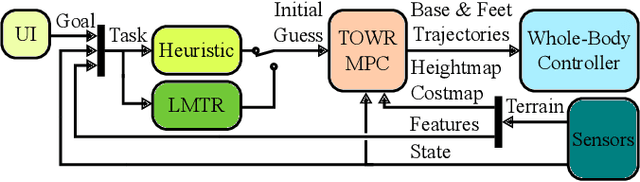
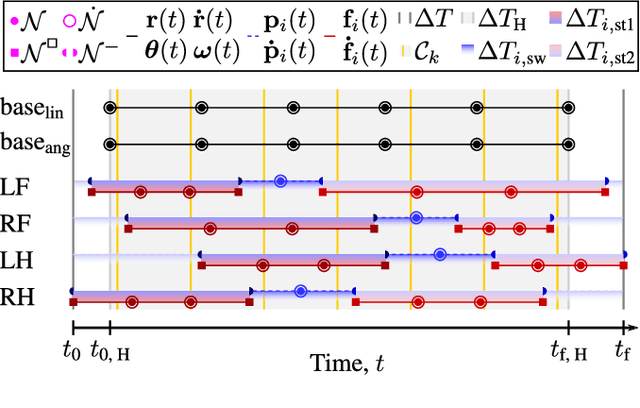
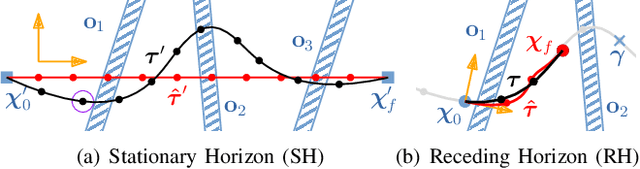
To dynamically traverse challenging terrain, legged robots need to continually perceive and reason about upcoming features, adjust the locations and timings of future footfalls and leverage momentum strategically. We present a pipeline that enables flexibly-parametrized trajectories for perceptive and dynamic quadruped locomotion to be optimized in an online, receding-horizon manner. The initial guess passed to the optimizer affects the computation needed to achieve convergence and the quality of the solution. We consider two methods for generating good guesses. The first is a heuristic initializer which provides a simple guess and requires significant optimization but is nonetheless suitable for adaptation to upcoming terrain. We demonstrate experiments using the ANYmal C quadruped, with fully onboard sensing and computation, to cross obstacles at moderate speeds using this technique. Our second approach uses latent-mode trajectory regression (LMTR) to imitate expert data - while avoiding invalid interpolations between distinct behaviors - such that minimal optimization is needed. This enables high-speed motions that make more expansive use of the robot's capabilities. We demonstrate it on flat ground with the real robot and provide numerical trials that progress toward deployment on terrain. These results illustrate a paradigm for advancing beyond short-horizon dynamic reactions, toward the type of intuitive and adaptive locomotion planning exhibited by animals and humans.
RLOC: Terrain-Aware Legged Locomotion using Reinforcement Learning and Optimal Control
Dec 05, 2020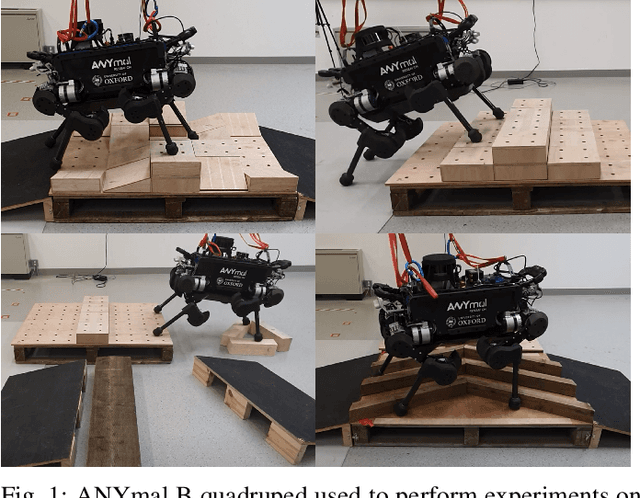
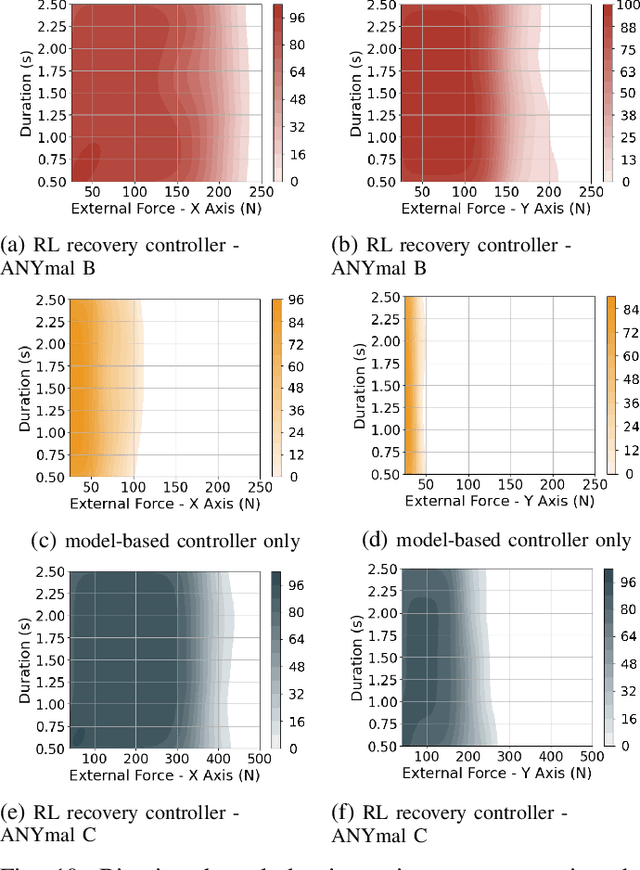
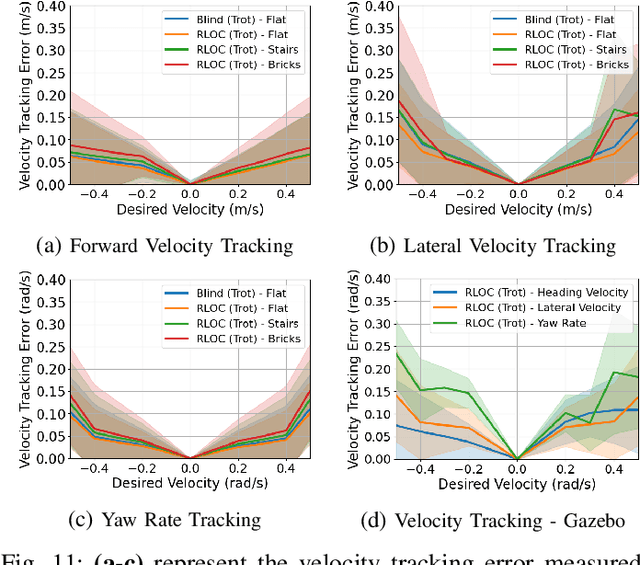

We present a unified model-based and data-driven approach for quadrupedal planning and control to achieve dynamic locomotion over uneven terrain. We utilize on-board proprioceptive and exteroceptive feedback to map sensory information and desired base velocity commands into footstep plans using a reinforcement learning (RL) policy trained in simulation over a wide range of procedurally generated terrains. When ran online, the system tracks the generated footstep plans using a model-based controller. We evaluate the robustness of our method over a wide variety of complex terrains. It exhibits behaviors which prioritize stability over aggressive locomotion. Additionally, we introduce two ancillary RL policies for corrective whole-body motion tracking and recovery control. These policies account for changes in physical parameters and external perturbations. We train and evaluate our framework on a complex quadrupedal system, ANYmal version B, and demonstrate transferability to a larger and heavier robot, ANYmal C, without requiring retraining.
An Efficient Paradigm for Feasibility Guarantees in Legged Locomotion
Nov 16, 2020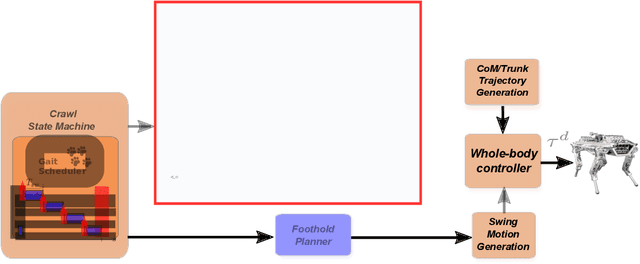
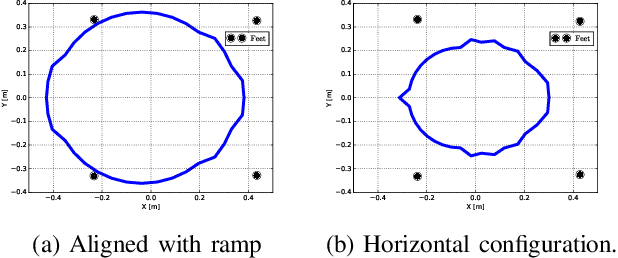
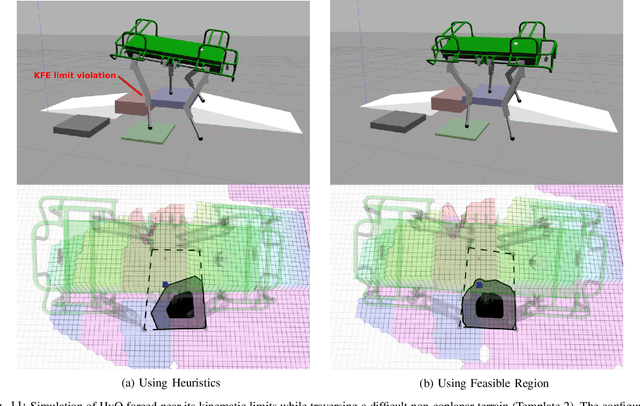
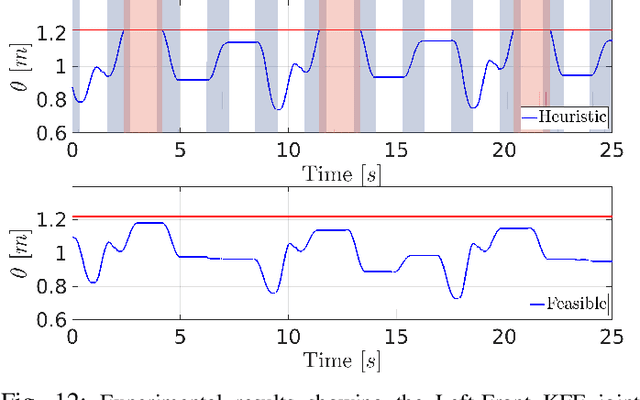
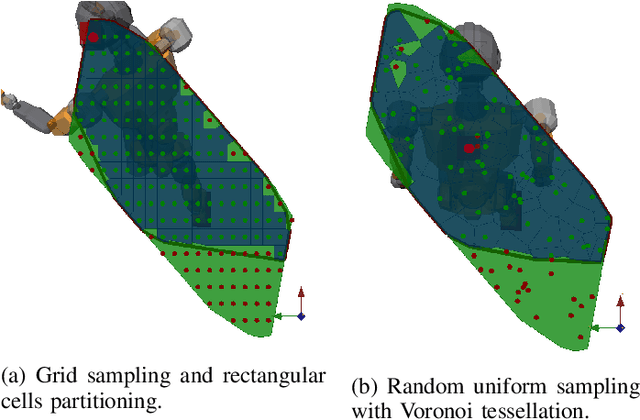
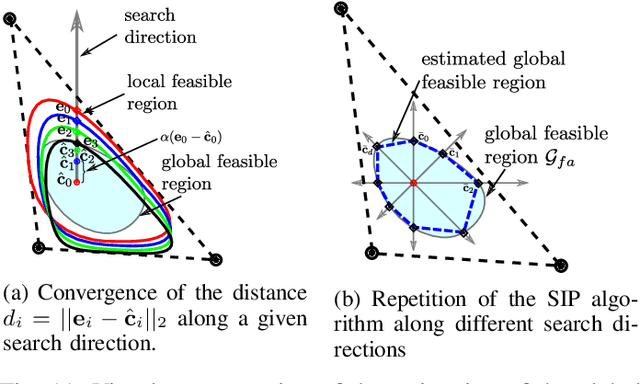
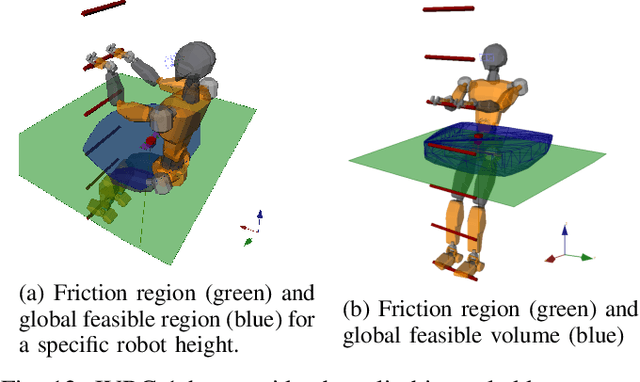
Developing feasible body trajectories for legged systems on arbitrary terrains is a challenging task. Given some contact points, the trajectories for the Center of Mass (CoM) and body orientation, designed to move the robot, must satisfy crucial constraints to maintain balance, and to avoid violating physical actuation and kinematic limits. In this paper, we present a paradigm that allows to design feasible trajectories in an efficient manner. In continuation to our previous work, we extend the notion of the 2D feasible region, where static balance and the satisfaction of actuation limits were guaranteed, whenever the projection of the CoM lies inside the proposed admissible region. We here develop a general formulation of the improved feasible region to guarantee dynamic balance alongside the satisfaction of both actuation and kinematic limits for arbitrary terrains in an efficient manner. To incorporate the feasibility of the kinematic limits, we introduce an algorithm that computes the reachable region of the CoM. Furthermore, we propose an efficient planning strategy that utilizes the improved feasible region to design feasible CoM and body orientation trajectories. Finally, we validate the capabilities of the improved feasible region and the effectiveness of the proposed planning strategy, using simulations and experiments on the HyQ robot and comparing them to a previously developed heuristic approach. Various scenarios and terrains that mimic confined and challenging environments are used for the validation.
On the Hardware Feasibility of Nonlinear Trajectory Optimization for Legged Locomotion based on a Simplified Dynamics
Oct 15, 2019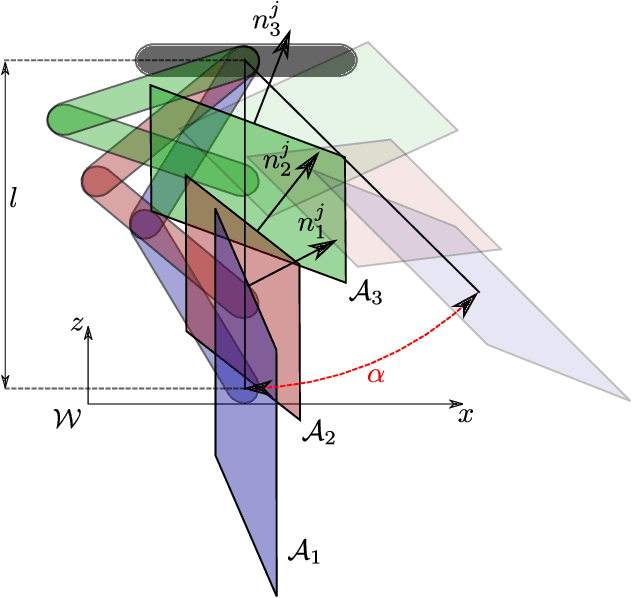
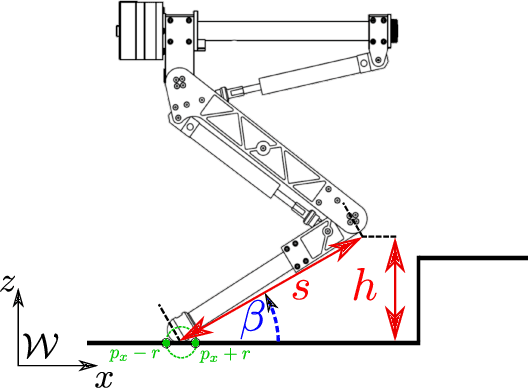
We propose two feasibility constraints to be included in a Single Rigid Body Dynamics-based trajectory optimizer in order to obtain robust motions for quadruped robots in challenging terrain. The former finds an approximate relationship between joint-torque limits and admissible contact forces without requiring the knowledge of the joints' configuration. The latter proposes a model of the leg to guarantee the avoidance of the collision with the environment. Such constraints have been included in a nonlinear non-convex optimization problem. We validate the feasibility of the trajectories both in simulation and on the HyQ robot, including experiments with non flat terrain.
Feasible Region: an Actuation-Aware Extension of the Support Region
Mar 19, 2019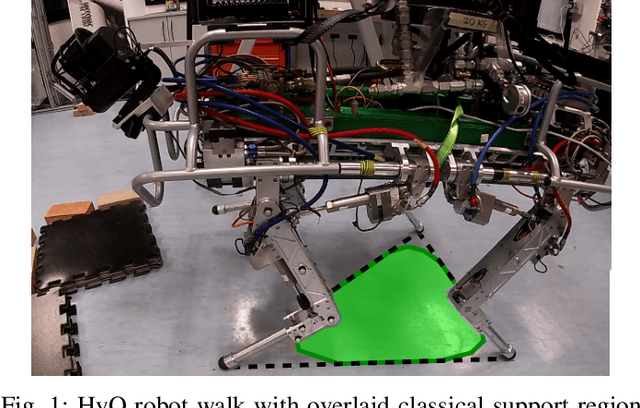
In legged locomotion the support region is defined as the 2D horizontal convex area where the robot is able to support its own body weight in static conditions. Despite this definition, when the joint-torque limits (actuation limits) are hit, the robot can be unable to carry its own body weight, even when the projection of its Center of Mass (CoM) lies inside the support region. In this manuscript we overcome this inconsistency by defining the Feasible Region, a revisited support region that guarantees both global static stability of the robot and the existence of a set of joint torques that are able to sustain the body weight. Thanks to the usage of an Iterative Projection (IP) algorithm, we show that the Feasible Region can be efficiently employed for online motion planning of loco-manipulation tasks for both humanoids and quadrupeds. Unlike the classical support region, the Feasible Region represents a local measure of the robots robustness to external disturbances and it must be recomputed at every configuration change. For this, we also propose a global extension of the Feasible Region that is configuration independent and only needs to be recomputed at every stance change.
Heuristic Planning for Rough Terrain Locomotion in Presence of External Disturbances and Variable Perception Quality
Nov 07, 2018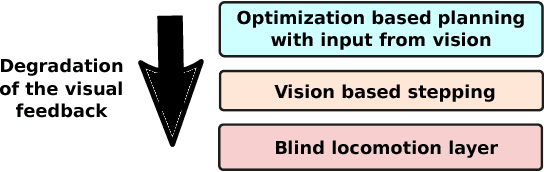
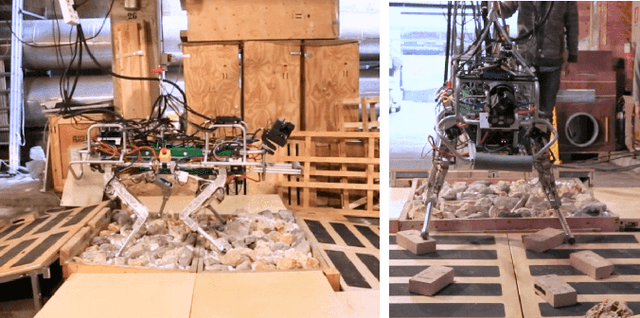
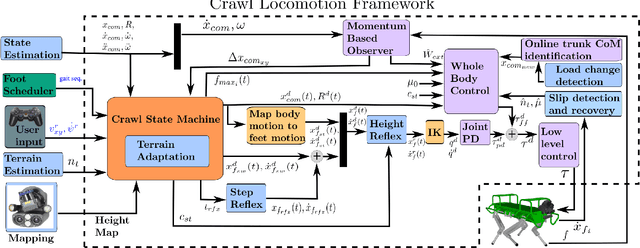
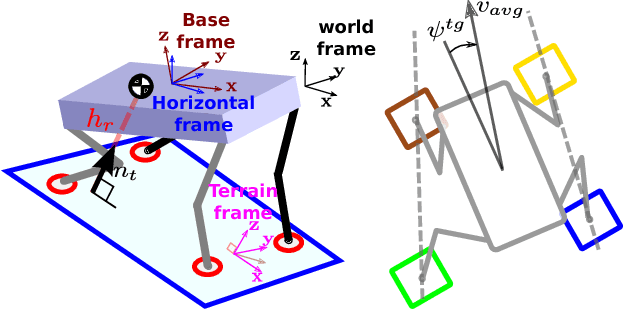
The quality of the visual feedback can vary significantly on a legged robot that is meant to traverse unknown and unstructured terrains. The map of the environment, acquired with online state-of-the-art algorithms, often degrades after a few steps, due to sensing inaccuracies, slippage and unexpected disturbances. When designing locomotion algorithms, this degradation can result in planned trajectories that are not consistent with the reality, if not dealt properly. In this work, we propose a heuristic-based planning approach that enables a quadruped robot to successfully traverse a significantly rough terrain (e.g., stones up to 10 cm of diameter), in absence of visual feedback. When available, the approach allows also to exploit the visual feedback (e.g., to enhance the stepping strategy) in multiple ways, according to the quality of the 3D map. The proposed framework also includes reflexes, triggered in specific situations, and the possibility to estimate online an unknown time-varying disturbance and compensate for it. We demonstrate the effectiveness of the approach with experiments performed on our quadruped robot HyQ (85 kg), traversing different terrains, such as: ramps, rocks, bricks, pallets and stairs. We also demonstrate the capability to estimate and compensate for disturbances, showing the robot walking up a ramp while pulling a cart attached to its back.
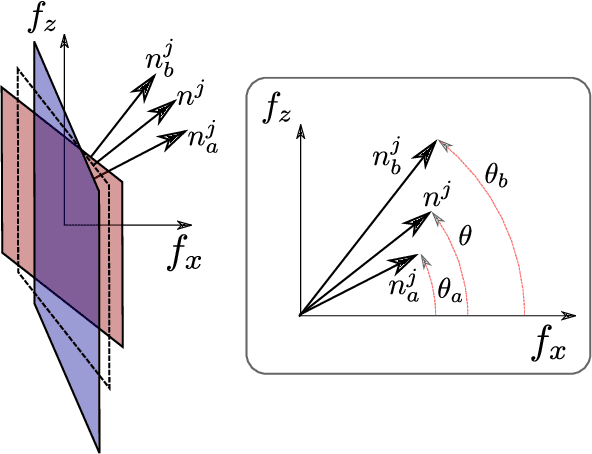
Application of Wrench based Feasibility Analysis to the Online Trajectory Optimization of Legged Robots
Jun 18, 2018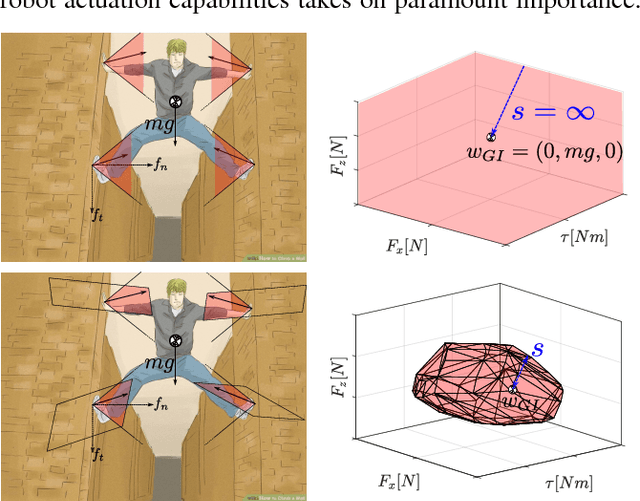
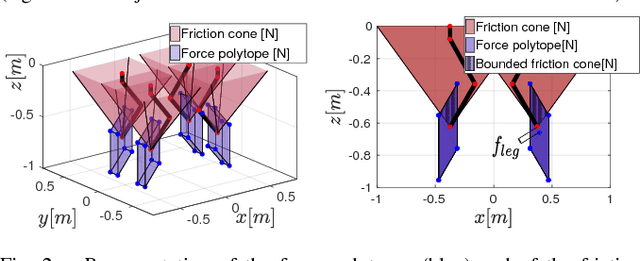
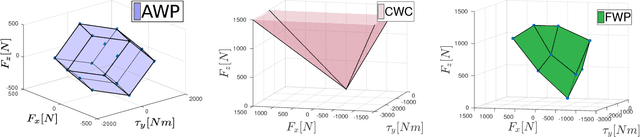
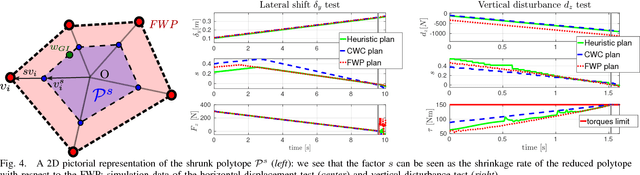
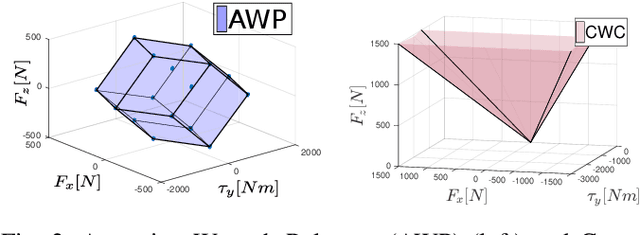
Motion planning in multi-contact scenarios has recently gathered interest within the legged robotics community, however actuator force/torque limits are rarely considered. We believe that these limits gain paramount importance when the complexity of the terrains to be traversed increases. We build on previous research from the field of robotic grasping to propose two new six-dimensional bounded polytopes named the Actuation Wrench Polytope (AWP) and the Feasible Wrench Polytope (FWP). We define the AWP as the set of all the wrenches that a robot can generate while considering its actuation limits. This considers the admissible contact forces that the robot can generate given its current configuration and actuation capabilities. The Contact Wrench Cone (CWC), instead, includes features of the environment such as the contact normal or the friction coefficient. The intersection of the AWP and of the CWC results in a convex polytope, the FWP, which turns out to be more descriptive of the real robot capabilities than existing simplified models, while maintaining the same compact representation. We explain how to efficiently compute the vertex-description of the FWP that is then used to evaluate a feasibility factor that we adapted from the field of robotic grasping. This allows us to optimize for robustness to external disturbance wrenches. Based on this, we present an implementation of a motion planner for our quadruped robot HyQ that provides online Center of Mass (CoM) trajectories that are guaranteed to be statically stable and actuation consistent.
The Actuation-consistent Wrench Polytope (AWP) and the Feasible Wrench Polytope (FWP)
Dec 07, 2017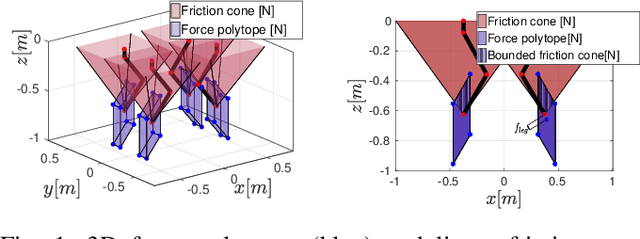
The motivation of our current research is to devise motion planners for legged locomotion that are able to exploit the robot's actuation capabilities. This means, when possible, to minimize joint torques or to propel as much as admissible when required. For this reason we define two new 6 dimensional bounded polytopes that we name Actuation-consistent Wrench Polytope (AWP) and Feasible Wrench Polytope (FWP). These objects turn out to be very useful in motion planning for the definition of constraints on the accelerations of the Center of Mass of the robot that respect the friction cones and the actuation limits. The AWP and the FWP could be used also in the robot design phase to size the actuators of the system based on some predefined reference motion.