 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFoothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped Robots
Mar 08, 2022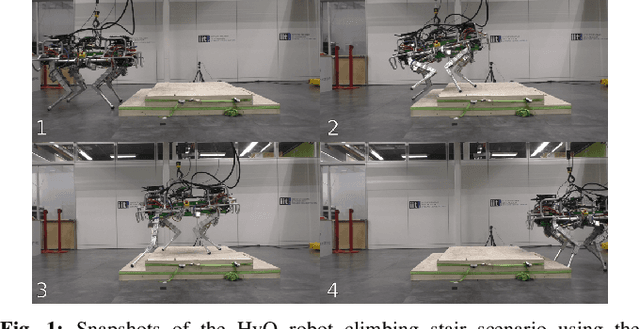

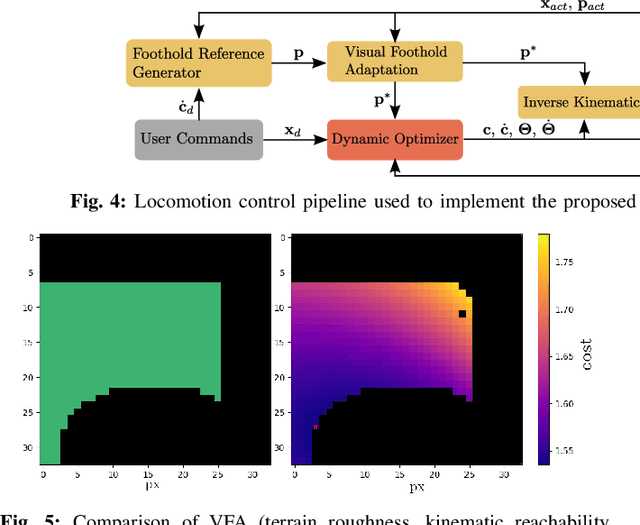
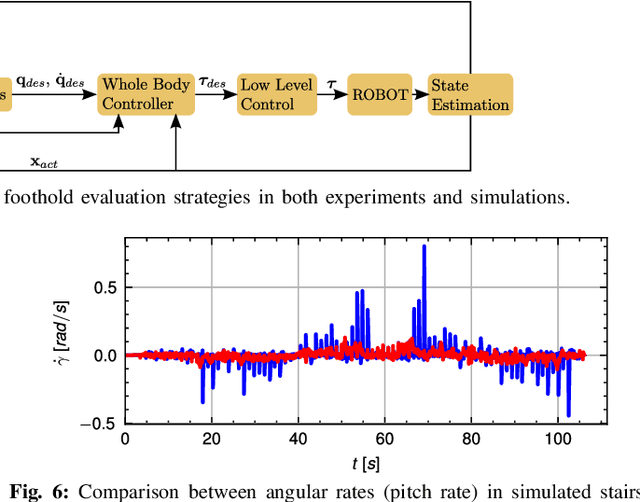
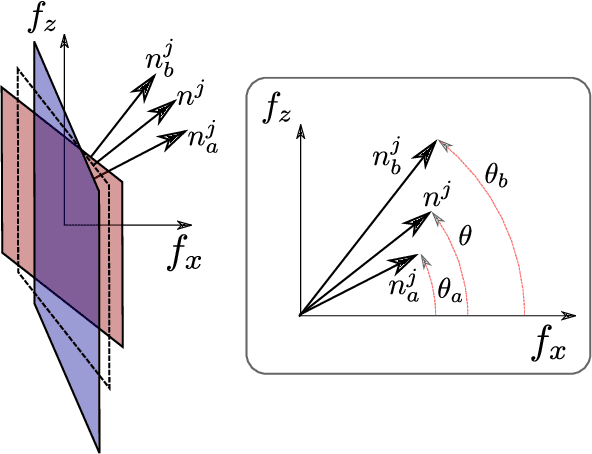
To traverse complex scenarios reliably a legged robot needs to move its base aided by the ground reaction forces, which can only be generated by the legs that are momentarily in contact with the ground. A proper selection of footholds is crucial for maintaining balance. In this paper, we propose a foothold evaluation criterion that considers the transition feasibility for both linear and angular dynamics to overcome complex scenarios. We devise convex and nonlinear formulations as a direct extension of the Continuous Convex Resolution of Centroidal Dynamic Trajectories (C-CROC) in a receding-horizon fashion to grant dynamic feasibility for future behaviours. The criterion is integrated with a Vision-based Foothold Adaptation (VFA) strategy that takes into account the robot kinematics, leg collisions and terrain morphology. We verify the validity of the selected footholds and the generated trajectories in simulation and experiments with the 90kg quadruped robot HyQ.
On the Hardware Feasibility of Nonlinear Trajectory Optimization for Legged Locomotion based on a Simplified Dynamics
Oct 15, 2019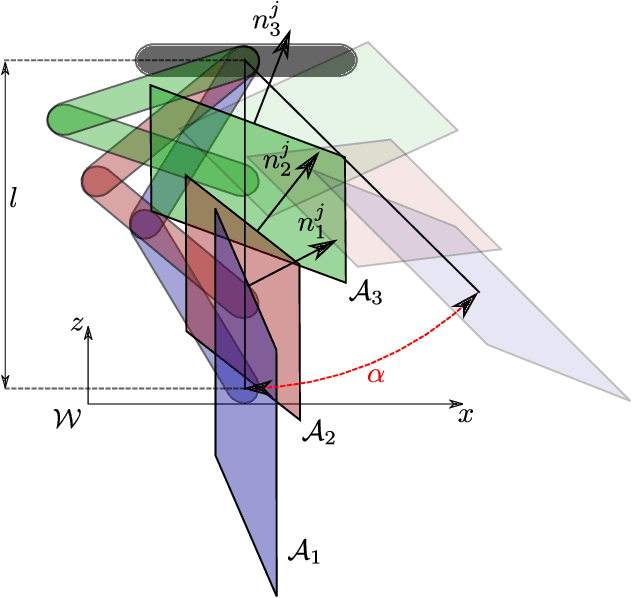
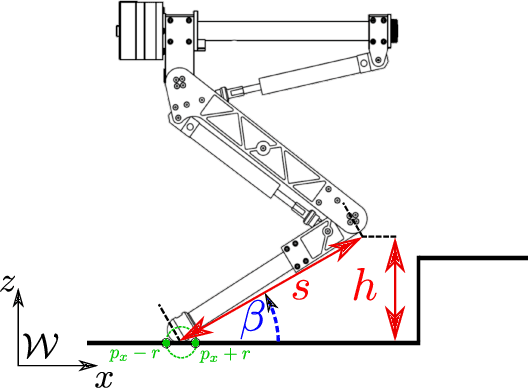
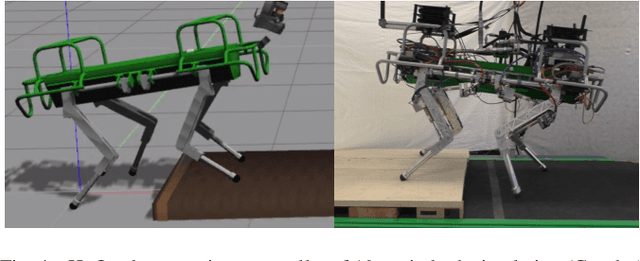
We propose two feasibility constraints to be included in a Single Rigid Body Dynamics-based trajectory optimizer in order to obtain robust motions for quadruped robots in challenging terrain. The former finds an approximate relationship between joint-torque limits and admissible contact forces without requiring the knowledge of the joints' configuration. The latter proposes a model of the leg to guarantee the avoidance of the collision with the environment. Such constraints have been included in a nonlinear non-convex optimization problem. We validate the feasibility of the trajectories both in simulation and on the HyQ robot, including experiments with non flat terrain.