 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision avoidance from monocular vision trained with novel view synthesis
Apr 09, 2025



Collision avoidance can be checked in explicit environment models such as elevation maps or occupancy grids, yet integrating such models with a locomotion policy requires accurate state estimation. In this work, we consider the question of collision avoidance from an implicit environment model. We use monocular RGB images as inputs and train a collisionavoidance policy from photorealistic images generated by 2D Gaussian splatting. We evaluate the resulting pipeline in realworld experiments under velocity commands that bring the robot on an intercept course with obstacles. Our results suggest that RGB images can be enough to make collision-avoidance decisions, both in the room where training data was collected and in out-of-distribution environments.
A Data-driven Contact Estimation Method for Wheeled-Biped Robots
Oct 17, 2024Contact estimation is a key ability for limbed robots, where making and breaking contacts has a direct impact on state estimation and balance control. Existing approaches typically rely on gate-cycle priors or designated contact sensors. We design a contact estimator that is suitable for the emerging wheeled-biped robot types that do not have these features. To this end, we propose a Bayes filter in which update steps are learned from real-robot torque measurements while prediction steps rely on inertial measurements. We evaluate this approach in extensive real-robot and simulation experiments. Our method achieves better performance while being considerably more sample efficient than a comparable deep-learning baseline.
Humanoid Control Under Interchangeable Fixed and Sliding Unilateral Contacts
Mar 04, 2021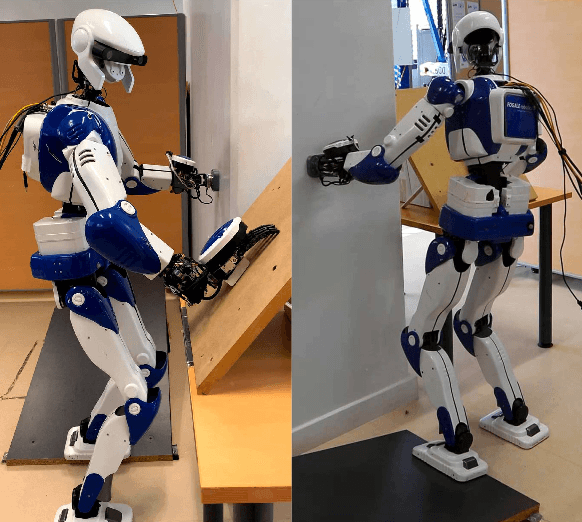
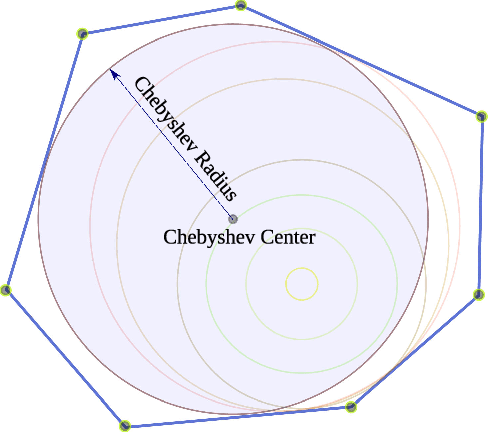
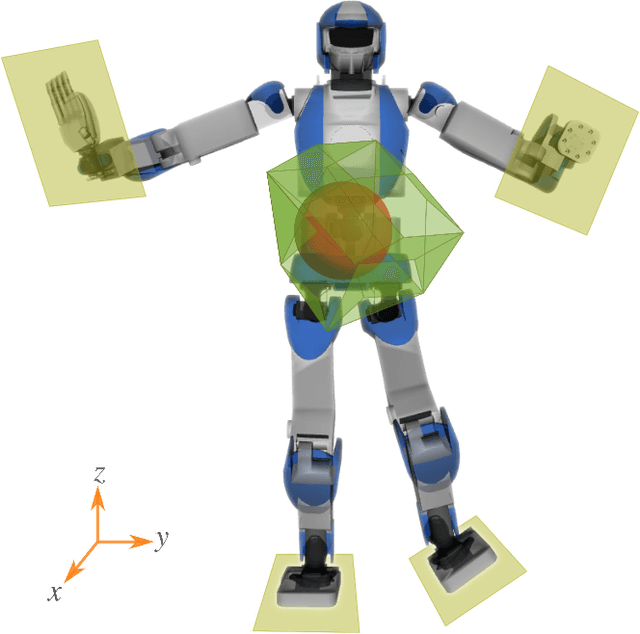
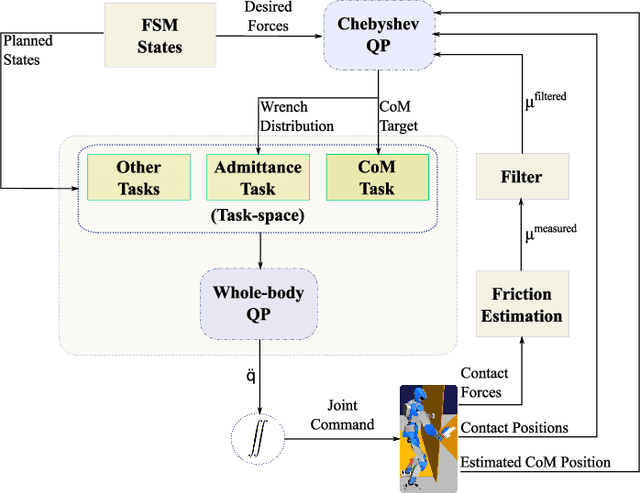
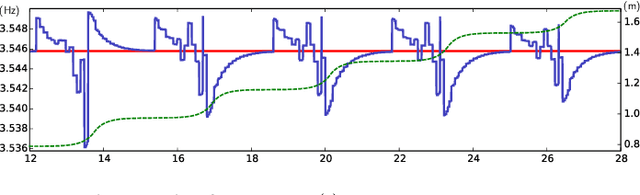
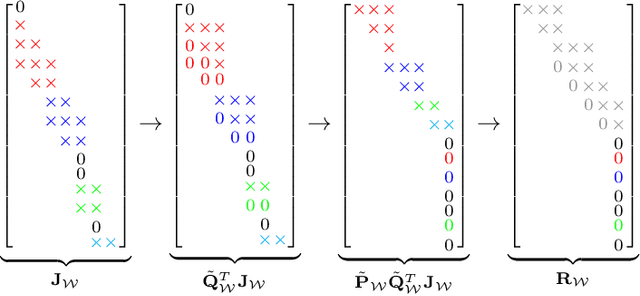
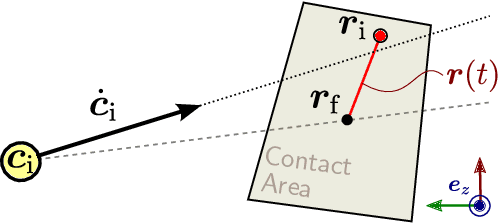
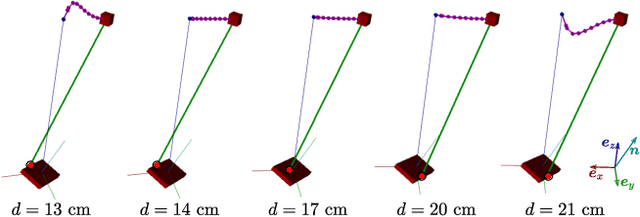
In this letter, we propose a whole-body control strategy for humanoid robots in multi-contact settings that enables switching between fixed and sliding contacts under active balance. We compute, in real-time, a safe center-of-mass position and wrench distribution of the contact points based on the Chebyshev center. Our solution is formulated as a quadratic programming problem without a priori computation of balance regions. We assess our approach with experiments highlighting switches between fixed and sliding contact modes in multi-contact configurations. A humanoid robot demonstrates such contact interchanges from fully-fixed to multi-sliding and also shuffling of the foot. The scenarios illustrate the performance of our control scheme in achieving the desired forces, CoM position attractor, and planned trajectories while actively maintaining balance.
Balance of Humanoid robot in Multi-contact and Sliding Scenarios
Sep 30, 2019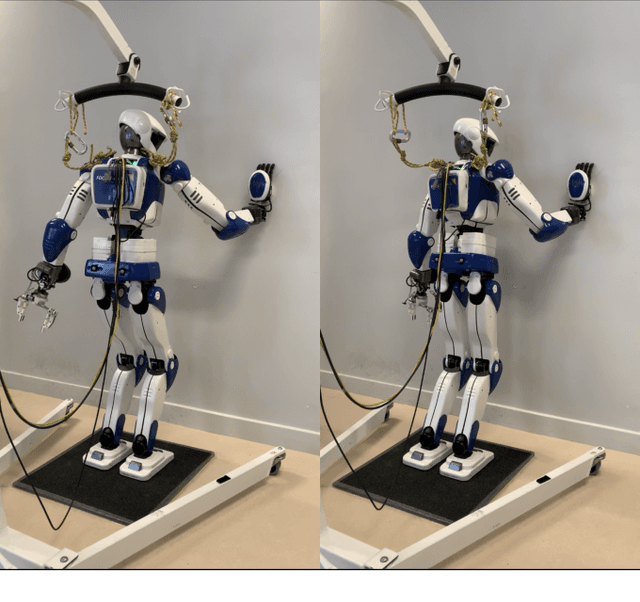
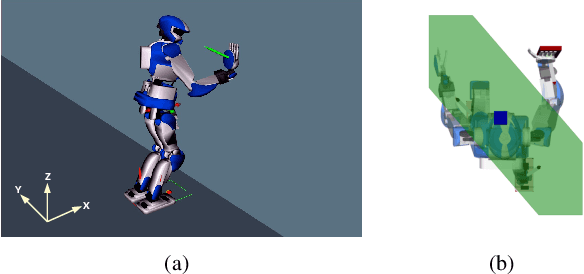
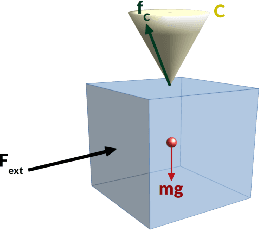
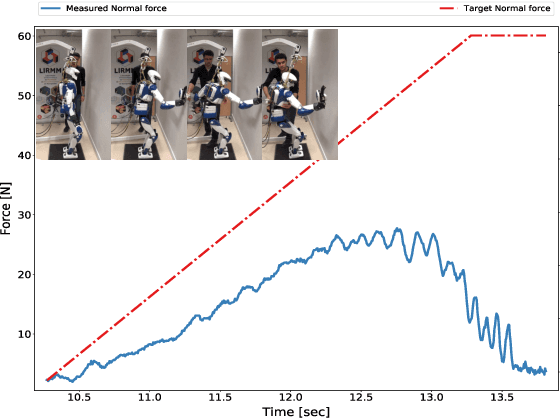
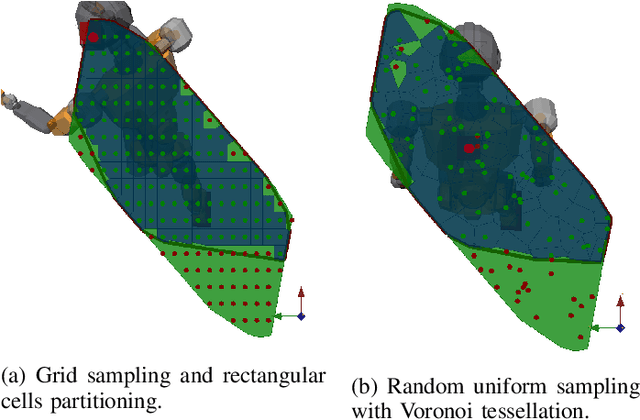
This study deals with the balance of humanoid or multi-legged robots in a multi-contact setting where a chosen subset of contacts is undergoing desired sliding-task motions. One method to keep balance is to hold the center-of-mass (CoM) within an admissible convex area. This area should be calculated based on the contact positions and forces. We introduce a methodology to compute this CoM support area (CSA) for multiple fixed and sliding contacts. To select the most appropriate CoM position inside CSA, we account for (i) constraints of multiple fixed and sliding contacts, (ii) desired wrench distribution for contacts, and (iii) desired position of CoM (eventually dictated by other tasks). These are formulated as a quadratic programming optimization problem. We illustrate our approach with pushing against a wall and wiping and conducted experiments using the HRP-4 humanoid robot.
Biped Stabilization by Linear Feedback of the Variable-Height Inverted Pendulum Model
Sep 17, 2019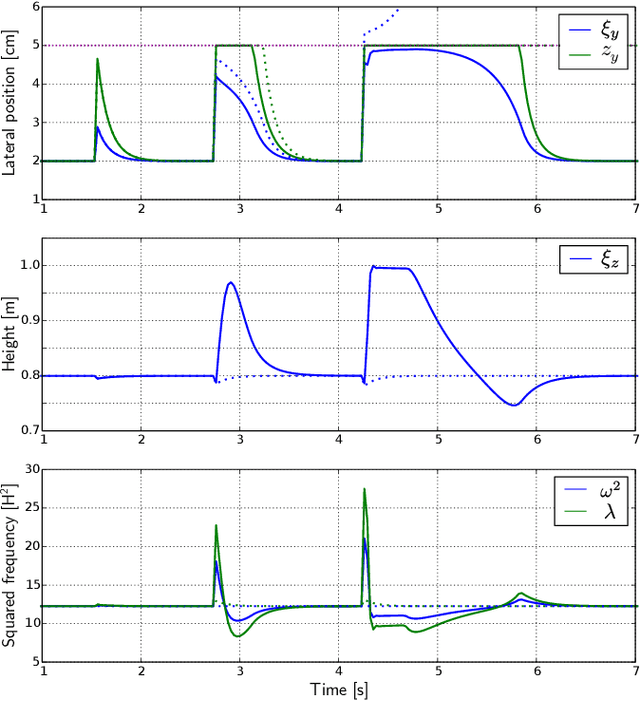
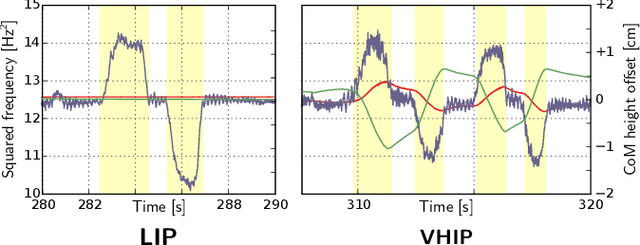
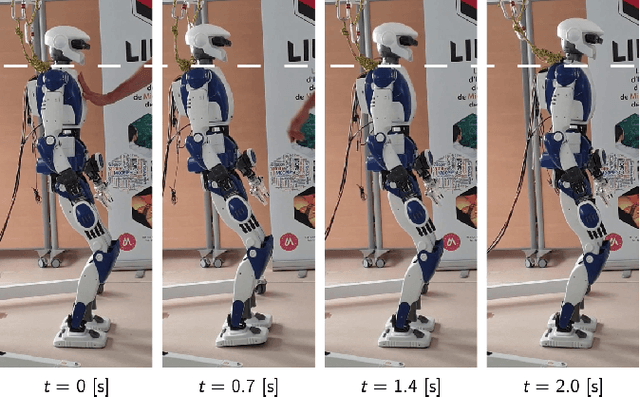
The variable-height inverted pendulum (VHIP) model enables a new balancing strategy, based on vertical motions of the center of mass, in addition to the well-known ankle strategy. We propose a biped stabilizer based on linear feedback of the VHIP that is simple to implement, coincides with the state-of-the-art for small perturbations and is able to recover from larger perturbations thanks to this new strategy. This solution is based on "best-effort" pole placement of the 4D divergent component of motion of the VHIP under input feasibility and state viability constraints. We complement it with a suitable whole-body admittance control law and test the stabilizer on the HRP-4 humanoid robot.
Feasible Region: an Actuation-Aware Extension of the Support Region
Mar 19, 2019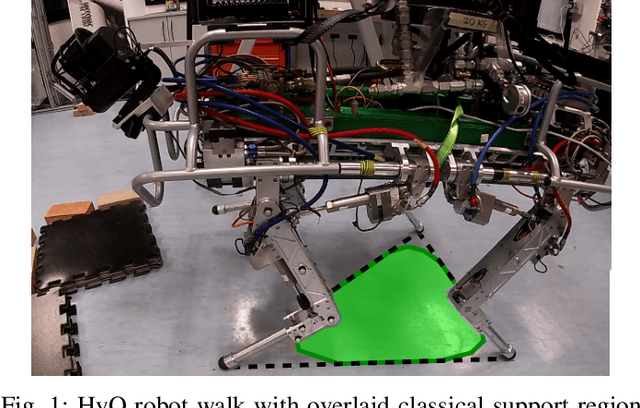
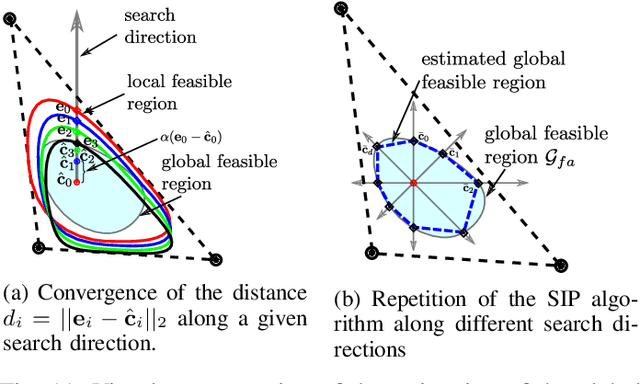
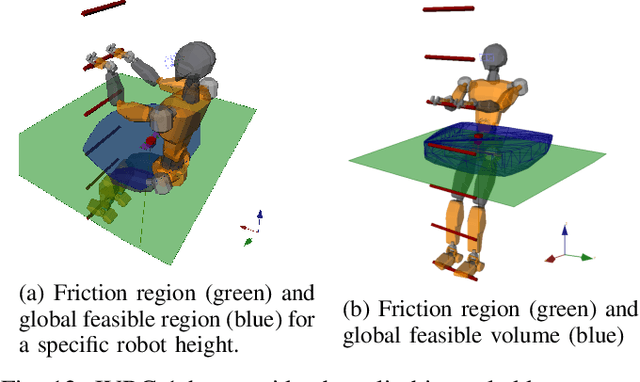
In legged locomotion the support region is defined as the 2D horizontal convex area where the robot is able to support its own body weight in static conditions. Despite this definition, when the joint-torque limits (actuation limits) are hit, the robot can be unable to carry its own body weight, even when the projection of its Center of Mass (CoM) lies inside the support region. In this manuscript we overcome this inconsistency by defining the Feasible Region, a revisited support region that guarantees both global static stability of the robot and the existence of a set of joint torques that are able to sustain the body weight. Thanks to the usage of an Iterative Projection (IP) algorithm, we show that the Feasible Region can be efficiently employed for online motion planning of loco-manipulation tasks for both humanoids and quadrupeds. Unlike the classical support region, the Feasible Region represents a local measure of the robots robustness to external disturbances and it must be recomputed at every configuration change. For this, we also propose a global extension of the Feasible Region that is configuration independent and only needs to be recomputed at every stance change.
Stair Climbing Stabilization of the HRP-4 Humanoid Robot using Whole-body Admittance Control
Mar 08, 2019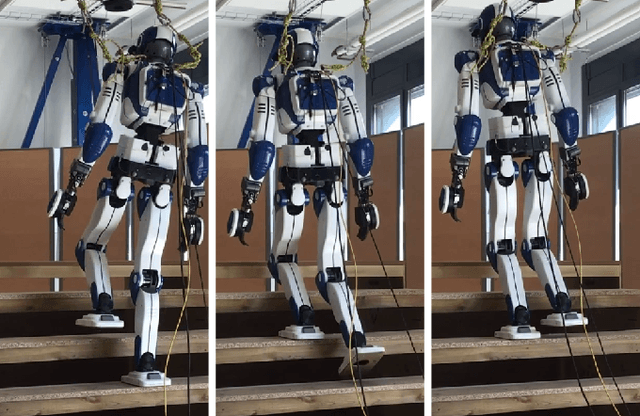
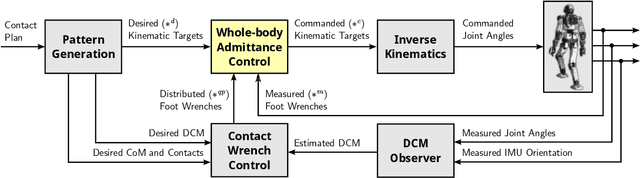
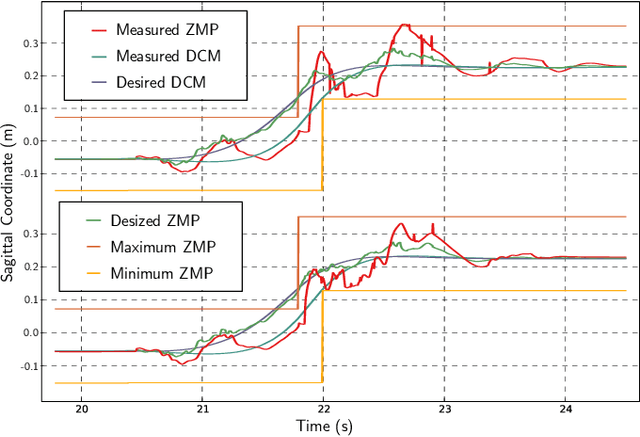
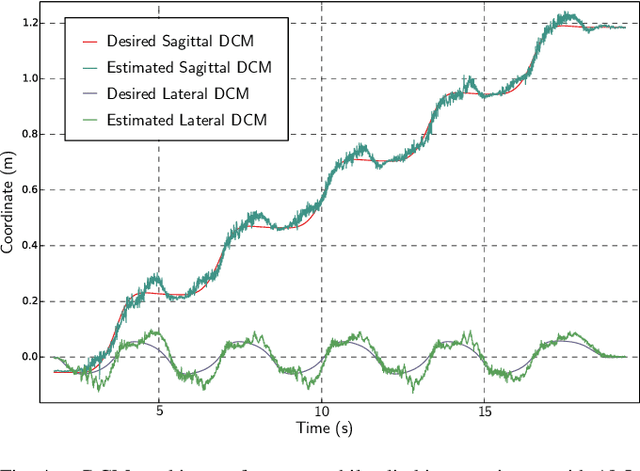
We consider dynamic stair climbing with the HRP-4 humanoid robot as part of an Airbus manufacturing use-case demonstrator. We share experimental knowledge gathered so as to achieve this task, which HRP-4 had never been challenged to before. In particular, we extend walkingstabilization based on linear inverted pendulum tracking by quadratic programming-based wrench distribution and a whole-body admittance controller that applies both end-effector and CoM strategies. While existing stabilizers tend to use either one or the other, our experience suggests that the combination of these two approaches improves tracking performance. We demonstrate this solution in an on-site experiment where HRP-4 climbs an industrial staircase with 18.5 cm high steps, and release our walking controller as open source software.
Capturability-based Pattern Generation for Walking with Variable Height
Oct 25, 2018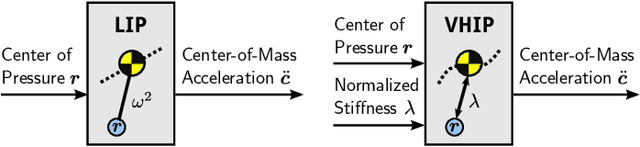
Capturability analysis of the linear inverted pendulum (LIP) model enabled walking with constrained height based on the capture point. We generalize this analysis to the variable-height inverted pendulum (VHIP) and show how it enables 3D walking over uneven terrains based on capture inputs. Thanks to a tailored optimization scheme, we can compute these inputs fast enough for real-time model predictive control. We implement this approach as open-source software and demonstrate it in dynamic simulations.
Balance control using both ZMP and COM height variations: A convex boundedness approach
Feb 27, 2018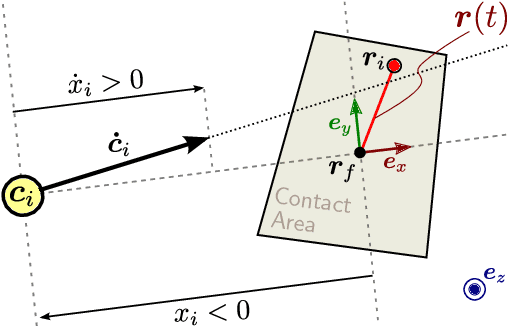
Developments for 3D control of the center of mass (CoM) of biped robots are currently located in two local minima: on the one hand, methods that allow CoM height variations but only work in the 2D sagittal plane; on the other hand, nonconvex direct transcriptions of centroidal dynamics that are delicate to handle. This paper presents an alternative that controls the CoM in 3D via an indirect transcription that is both low-dimensional and solvable fast enough for real-time control. The key to this development is the notion of boundedness condition, which quantifies the capturability of 3D CoM trajectories.
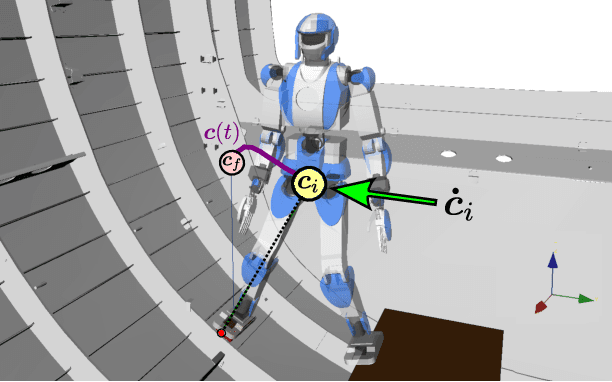
When to make a step? Tackling the timing problem in multi-contact locomotion by TOPP-MPC
Oct 11, 2017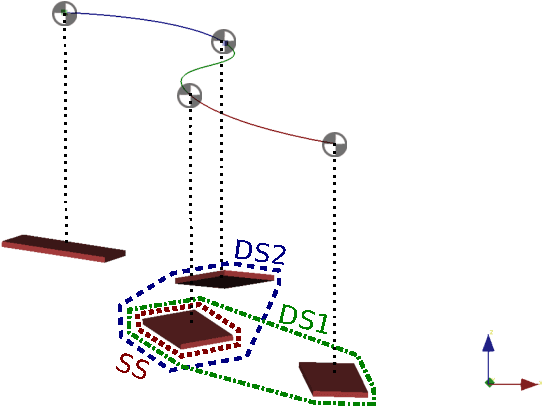
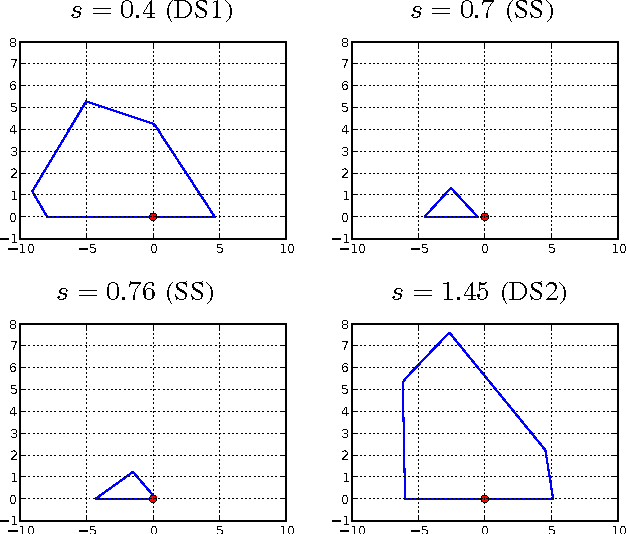
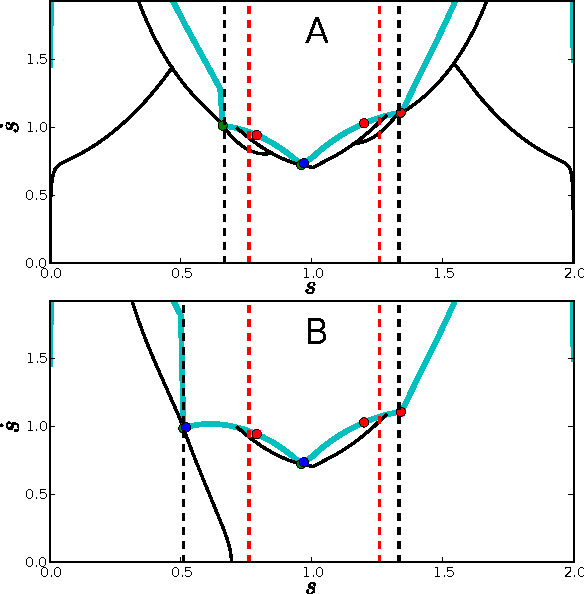
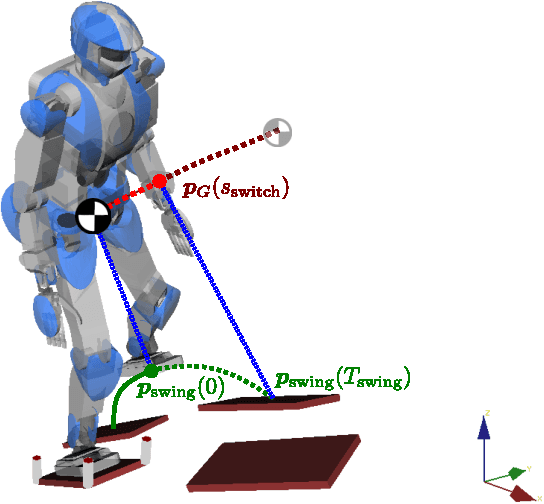
We present a model predictive controller (MPC) for multi-contact locomotion where predictive optimizations are realized by time-optimal path parameterization (TOPP). A key feature of this solution is that, contrary to existing planners where step timings are provided as inputs, here the timing between contact switches is computed as output of a fast nonlinear optimization. This is particularly appealing to multi-contact locomotion, where proper timings depend on terrain topology and suitable heuristics are unknown. We show how to formulate legged locomotion as a TOPP problem and demonstrate the behavior of the resulting TOPP-MPC controller in simulations with a model of the HRP-4 humanoid robot.