 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent machines work in unstructured environments by differential neural computing
Oct 03, 2023Expecting intelligent machines to efficiently work in real world requires a new method to understand unstructured information in unknown environments with good accuracy, scalability and generalization, like human. Here, a memristive neural computing based perceptual signal differential processing and learning method for intelligent machines is presented, via extracting main features of environmental information and applying associated encoded stimuli to memristors, we successfully obtain human-like ability in processing unstructured environmental information, such as amplification (>720%) and adaptation (<50%) of mechanical stimuli. The method also exhibits good scalability and generalization, validated in two typical applications of intelligent machines: object grasping and autonomous driving. In the former, a robot hand experimentally realizes safe and stable grasping, through learning unknown object features (e.g., sharp corner and smooth surface) with a single memristor in 1 ms. In the latter, the decision-making information of 10 unstructured environments in autonomous driving (e.g., overtaking cars, pedestrians) are accurately (94%) extracted with a 40x25 memristor array. By mimicking the intrinsic nature of human low-level perception mechanisms in electronic memristive neural circuits, the proposed method is adaptable to diverse sensing technologies, helping intelligent machines to generate smart high-level decisions in real world.
An Empirical Evaluation of Various Information Gain Criteria for Active Tactile Action Selection for Pose Estimation
May 10, 2022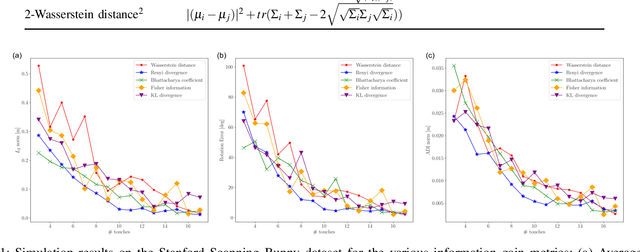
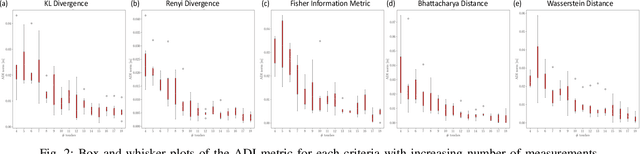
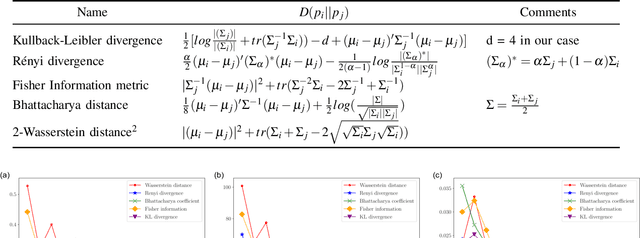
Accurate object pose estimation using multi-modal perception such as visual and tactile sensing have been used for autonomous robotic manipulators in literature. Due to variation in density of visual and tactile data, we previously proposed a novel probabilistic Bayesian filter-based approach termed translation-invariant Quaternion filter (TIQF) for pose estimation. As tactile data collection is time consuming, active tactile data collection is preferred by reasoning over multiple potential actions for maximal expected information gain. In this paper, we empirically evaluate various information gain criteria for action selection in the context of object pose estimation. We demonstrate the adaptability and effectiveness of our proposed TIQF pose estimation approach with various information gain criteria. We find similar performance in terms of pose accuracy with sparse measurements across all the selected criteria.
Towards Robust 3D Object Recognition with Dense-to-Sparse Deep Domain Adaptation
May 07, 2022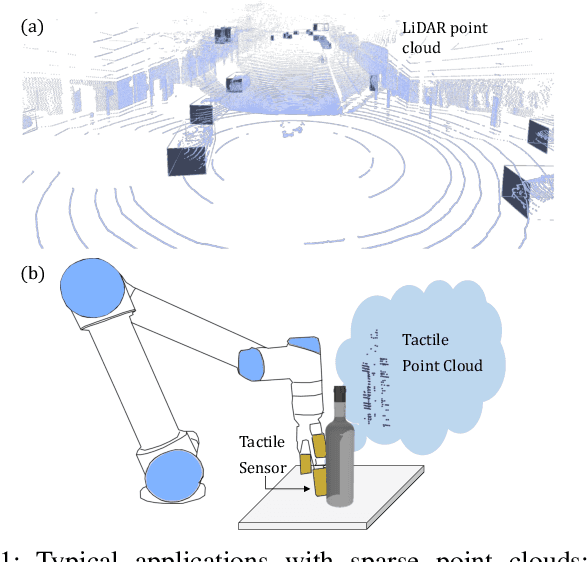
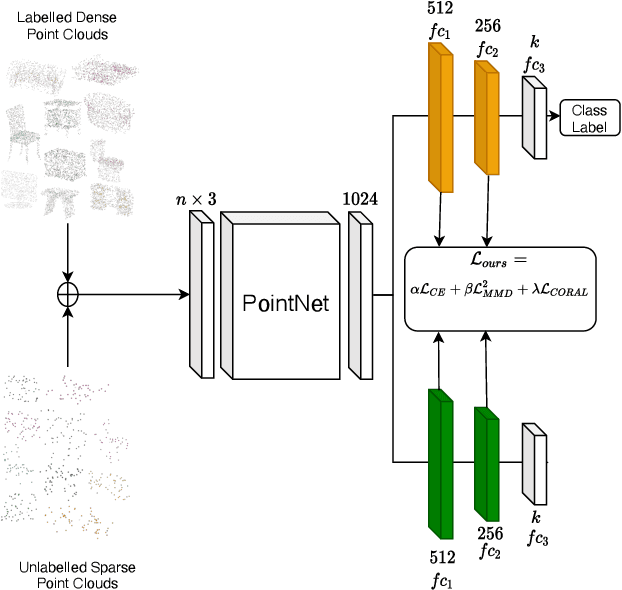
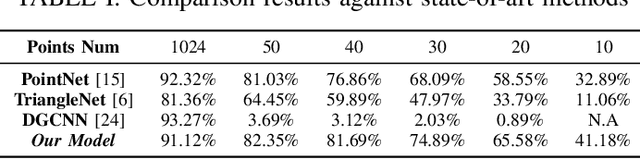
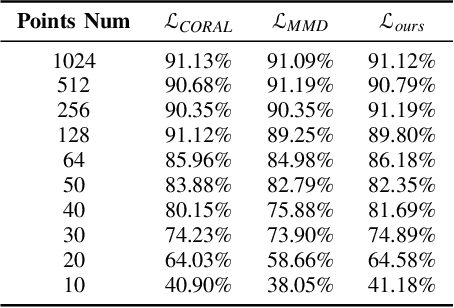
Three-dimensional (3D) object recognition is crucial for intelligent autonomous agents such as autonomous vehicles and robots alike to operate effectively in unstructured environments. Most state-of-art approaches rely on relatively dense point clouds and performance drops significantly for sparse point clouds. Unsupervised domain adaption allows to minimise the discrepancy between dense and sparse point clouds with minimal unlabelled sparse point clouds, thereby saving additional sparse data collection, annotation and retraining costs. In this work, we propose a novel method for point cloud based object recognition with competitive performance with state-of-art methods on dense and sparse point clouds while being trained only with dense point clouds.
Active Visuo-Tactile Interactive Robotic Perception for Accurate Object Pose Estimation in Dense Clutter
Feb 04, 2022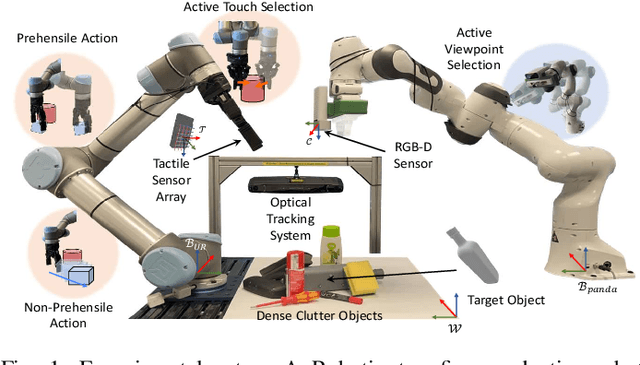
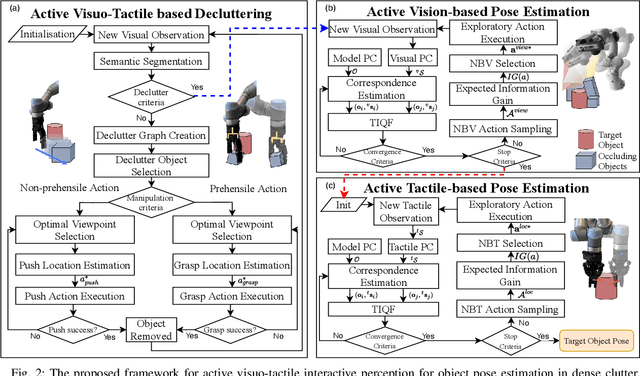
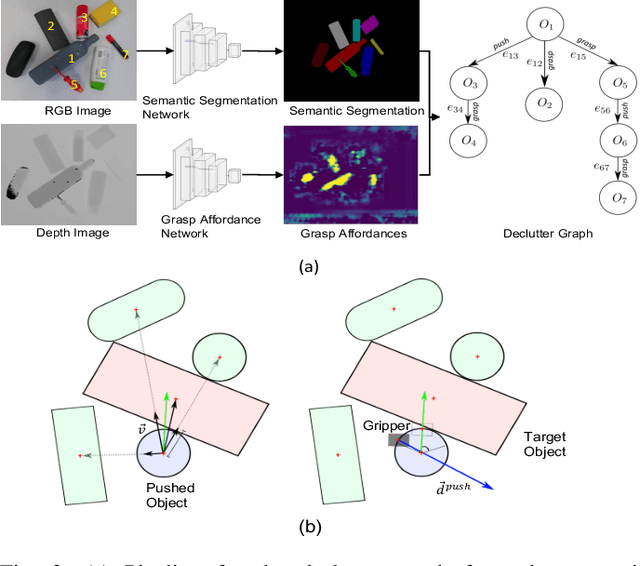
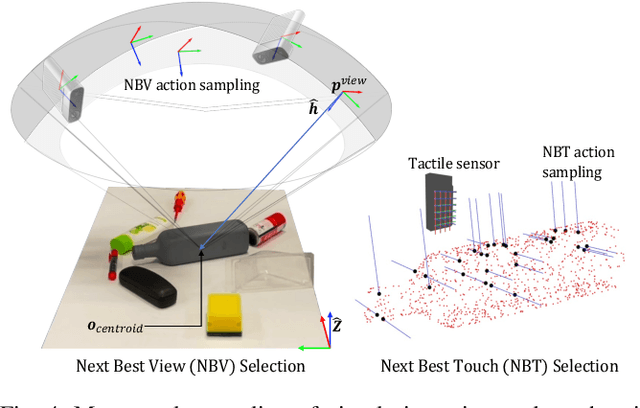
This work presents a novel active visuo-tactile based framework for robotic systems to accurately estimate pose of objects in dense cluttered environments. The scene representation is derived using a novel declutter graph (DG) which describes the relationship among objects in the scene for decluttering by leveraging semantic segmentation and grasp affordances networks. The graph formulation allows robots to efficiently declutter the workspace by autonomously selecting the next best object to remove and the optimal action (prehensile or non-prehensile) to perform. Furthermore, we propose a novel translation-invariant Quaternion filter (TIQF) for active vision and active tactile based pose estimation. Both active visual and active tactile points are selected by maximizing the expected information gain. We evaluate our proposed framework on a system with two robots coordinating on randomized scenes of dense cluttered objects and perform ablation studies with static vision and active vision based estimation prior and post decluttering as baselines. Our proposed active visuo-tactile interactive perception framework shows upto 36% improvement in pose accuracy compared to the active vision baseline.
Robotic Tactile Perception of Object Properties: A Review
Nov 10, 2017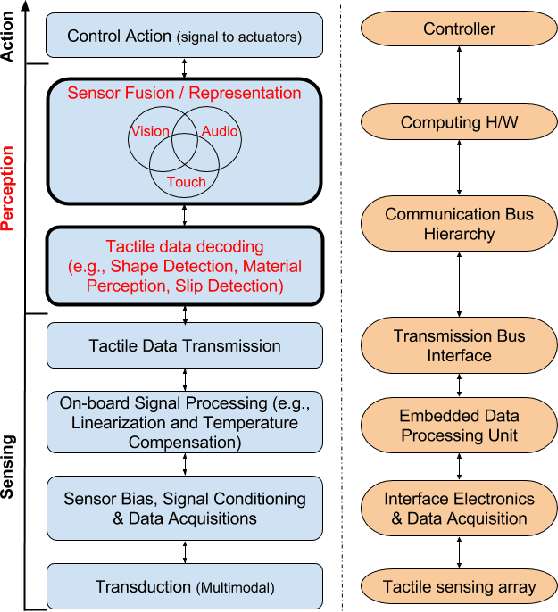
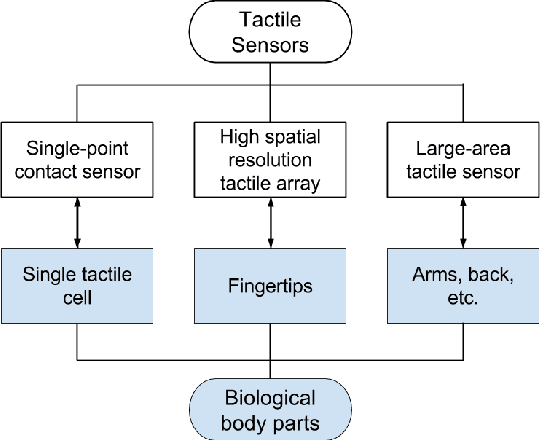
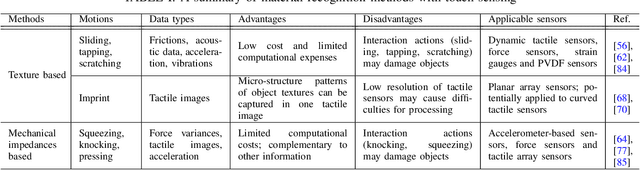
Touch sensing can help robots understand their sur- rounding environment, and in particular the objects they interact with. To this end, roboticists have, in the last few decades, developed several tactile sensing solutions, extensively reported in the literature. Research into interpreting the conveyed tactile information has also started to attract increasing attention in recent years. However, a comprehensive study on this topic is yet to be reported. In an effort to collect and summarize the major scientific achievements in the area, this survey extensively reviews current trends in robot tactile perception of object properties. Available tactile sensing technologies are briefly presented before an extensive review on tactile recognition of object properties. The object properties that are targeted by this review are shape, surface material and object pose. The role of touch sensing in combination with other sensing sources is also discussed. In this review, open issues are identified and future directions for applying tactile sensing in different tasks are suggested.