 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Service Robot Tasks: UT Austin Villa@Home 2019 Team Report
Sep 14, 2019
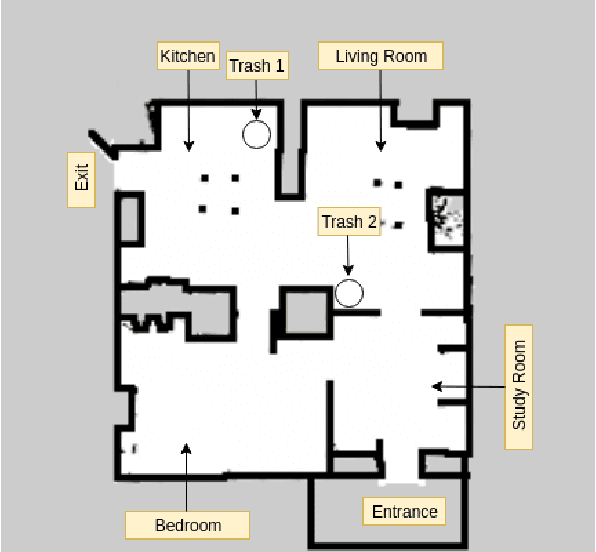
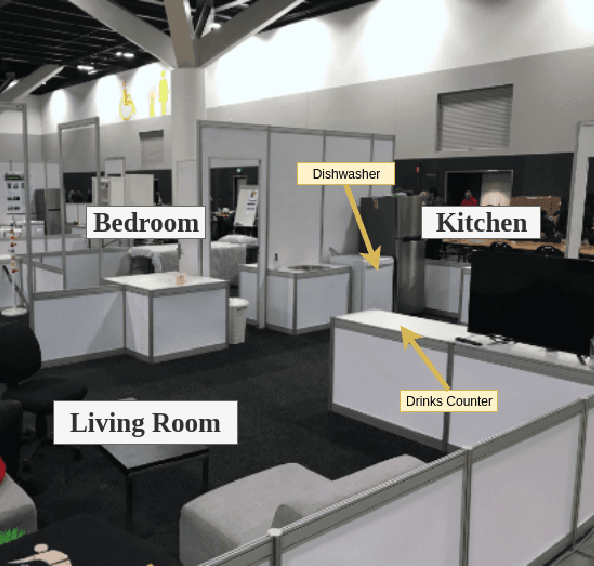
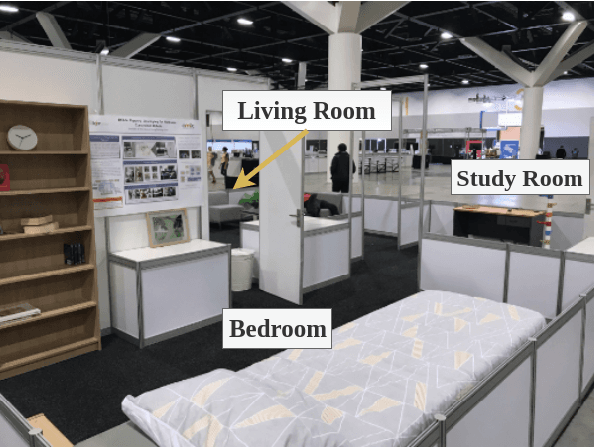
RoboCup@Home is an international robotics competition based on domestic tasks requiring autonomous capabilities pertaining to a large variety of AI technologies. Research challenges are motivated by these tasks both at the level of individual technologies and the integration of subsystems into a fully functional, robustly autonomous system. We describe the progress made by the UT Austin Villa 2019 RoboCup@Home team which represents a significant step forward in AI-based HRI due to the breadth of tasks accomplished within a unified system. Presented are the competition tasks, component technologies they rely on, our initial approaches both to the components and their integration, and directions for future research.
Decentralized Control Systems Laboratory Using Human Centered Robotic Actuators
Apr 09, 2019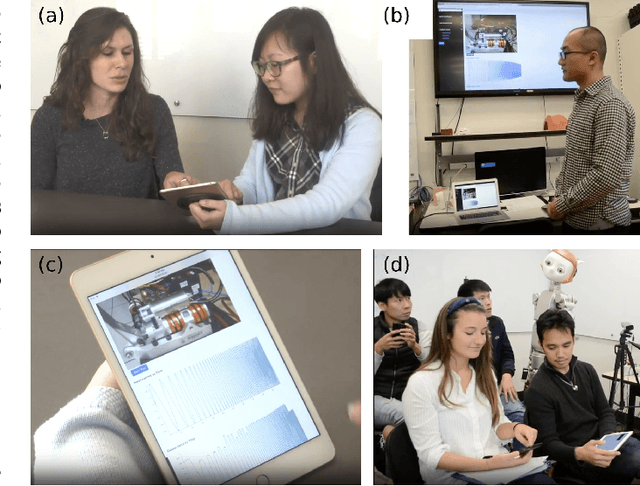
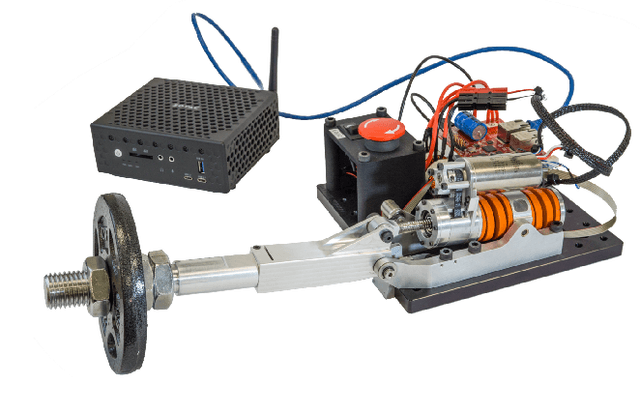
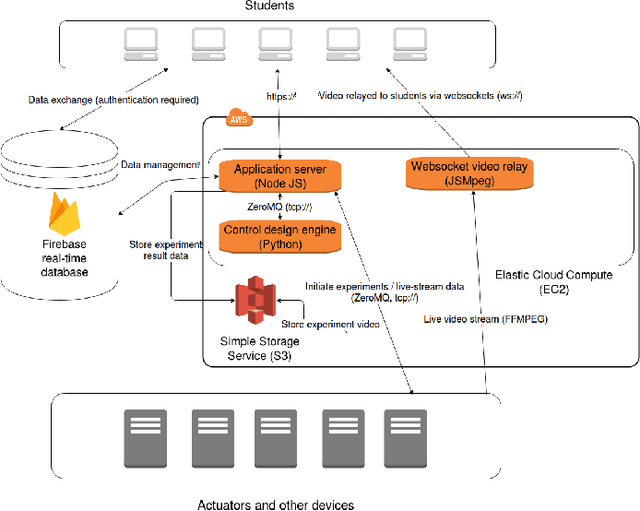
University laboratories deliver unique hands-on experimentation for STEM students but often lack state-of-the-art equipment and provide limited access to their equipment. The University of Texas Cloud Laboratory provides remote access to a cutting-edge series elastic actuators for student experimentation regarding human-centered robotics, dynamical systems, and controls. Through a browser-based interface, students are provided with various learning materials using the remote hardware-in-the-loop system for effective experiment-based education. This paper discusses the methods used to connect remote hardware to mobile browsers, the adaptation of textbook materials regarding system identification and feedback control, data processing to generate clean and useful results for student interpretation, and initial usage of the end-to-end system for individual and group learning.
Toward Achieving Formal Guarantees for Human-Aware Controllers in Human-Robot Interactions
Mar 04, 2019
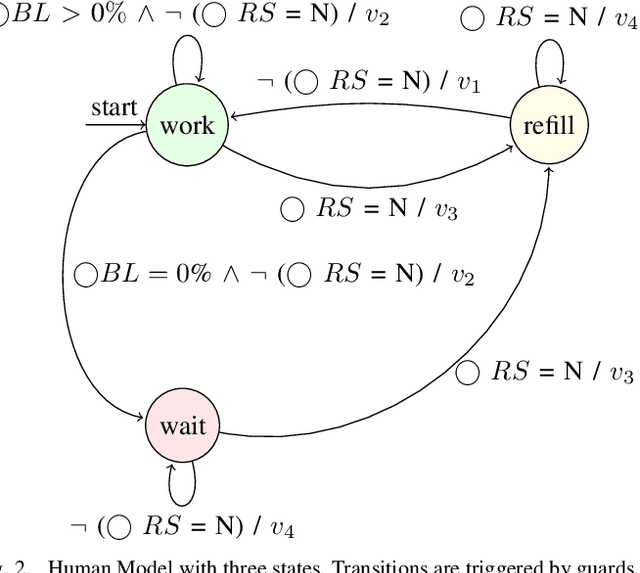
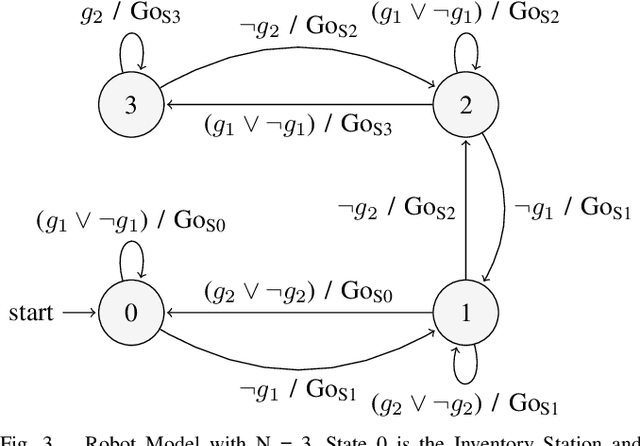
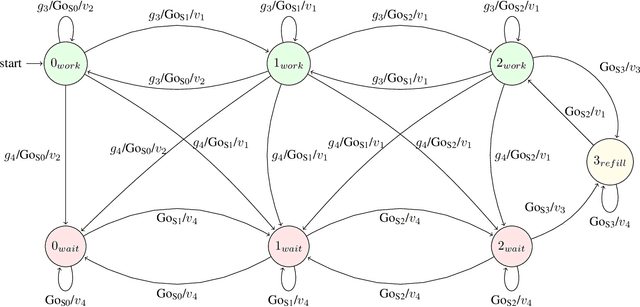
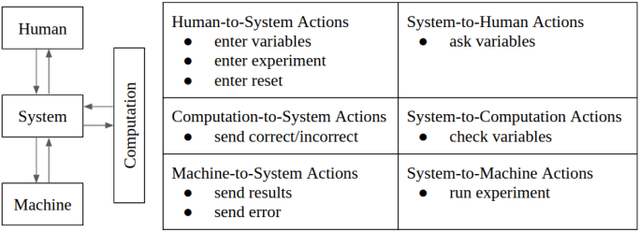
With the primary objective of human-robot interaction being to support humans' goals, there exists a need to formally synthesize robot controllers that can provide the desired service. Synthesis techniques have the benefit of providing formal guarantees for specification satisfaction. There is potential to apply these techniques for devising robot controllers whose specifications are coupled with human needs. This paper explores the use of formal methods to construct human-aware robot controllers to support the productivity requirements of humans. We tackle these types of scenarios via human workload-informed models and reactive synthesis. This strategy allows us to synthesize controllers that fulfill formal specifications that are expressed as linear temporal logic formulas. We present a case study in which we reason about a work delivery and pickup task such that the robot increases worker productivity, but not stress induced by high work backlog. We demonstrate our controller using the Toyota HSR, a mobile manipulator robot. The results demonstrate the realization of a robust robot controller that is guaranteed to properly reason and react in collaborative tasks with human partners.
Exploiting the Natural Dynamics of Series Elastic Robots by Actuator-Centered Sequential Linear Programming
Jul 17, 2018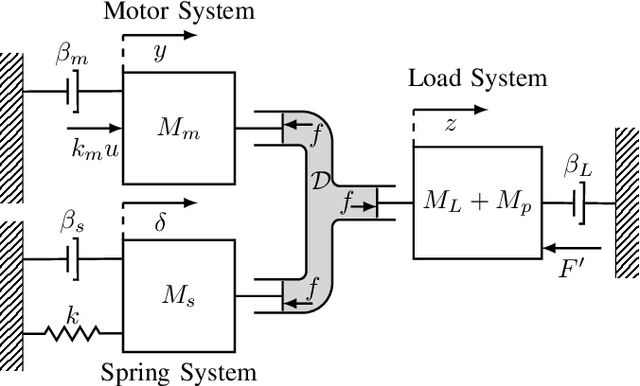
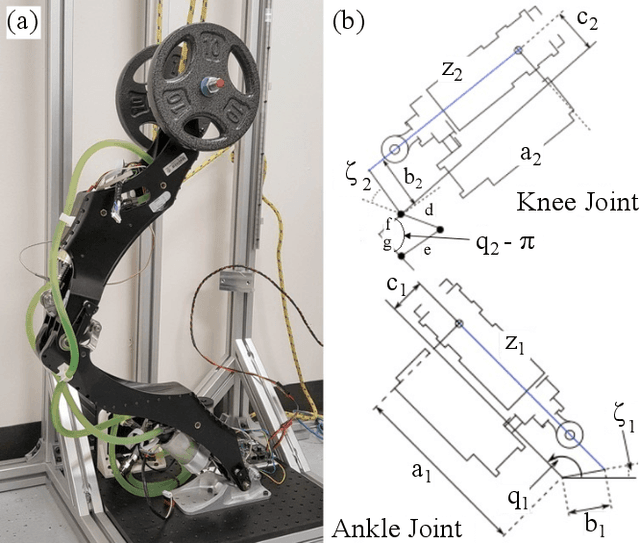
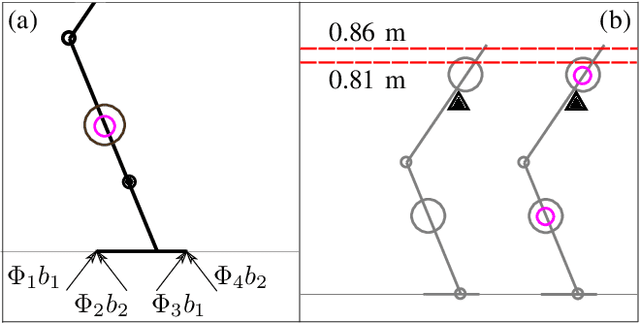
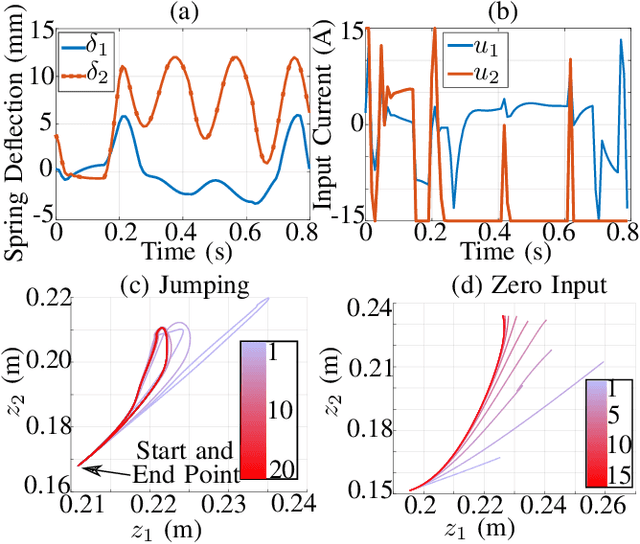
Series elastic robots are best able to follow trajectories which obey the limitations of their actuators, since they cannot instantly change their joint forces. In fact, the performance of series elastic actuators can surpass that of ideal force source actuators by storing and releasing energy. In this paper, we formulate the trajectory optimization problem for series elastic robots in a novel way based on sequential linear programming. Our framework is unique in the separation of the actuator dynamics from the rest of the dynamics, and in the use of a tunable pseudo-mass parameter that improves the discretization accuracy of our approach. The actuator dynamics are truly linear, which allows them to be excluded from trust-region mechanics. This causes our algorithm to have similar run times with and without the actuator dynamics. We demonstrate our optimization algorithm by tuning high performance behaviors for a single-leg robot in simulation and on hardware for a single degree-of-freedom actuator testbed. The results show that compliance allows for faster motions and takes a similar amount of computation time.