 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoidMimicGen: Data Generation for Loco-Manipulation via Whole-Body Planning
May 26, 2026Imitation learning is a promising approach for training humanoid robots to both walk and manipulate, but it requires a large number of demonstrations, which are time-intensive and difficult to collect via teleoperation. Existing data-generation algorithms can automatically synthesize demonstrations for manipulators, but they are ineffective on humanoids because their high-dimensional composite action spaces involve arms, legs, and torsos. We present HumanoidMimicGen, a method for generating humanoid legged loco-manipulation data. Our method adapts contact-rich whole-body skills from a handful of source demonstrations to new states, generalizing across changes in object pose. By interleaving these single- and dual-arm skills with whole-body locomotion and manipulation planning, the method generates stable, collision-free data across diverse scenes and layouts. To evaluate our approach, we introduce a new simulated loco-manipulation benchmark containing nine diverse tasks that test humanoid loco-manipulation capabilities. There, we demonstrate that HumanoidMimicGen automatically generates large datasets for imitation learning and enables a systematic study of how data generation and policy learning decisions impact model performance. We show that whole-body visuomotor policies co-trained with data generated by HumanoidMimicGen outperform those trained only on real-world data by 20%.
Sim-and-Real Co-Training: A Simple Recipe for Vision-Based Robotic Manipulation
Mar 31, 2025Large real-world robot datasets hold great potential to train generalist robot models, but scaling real-world human data collection is time-consuming and resource-intensive. Simulation has great potential in supplementing large-scale data, especially with recent advances in generative AI and automated data generation tools that enable scalable creation of robot behavior datasets. However, training a policy solely in simulation and transferring it to the real world often demands substantial human effort to bridge the reality gap. A compelling alternative is to co-train the policy on a mixture of simulation and real-world datasets. Preliminary studies have recently shown this strategy to substantially improve the performance of a policy over one trained on a limited amount of real-world data. Nonetheless, the community lacks a systematic understanding of sim-and-real co-training and what it takes to reap the benefits of simulation data for real-robot learning. This work presents a simple yet effective recipe for utilizing simulation data to solve vision-based robotic manipulation tasks. We derive this recipe from comprehensive experiments that validate the co-training strategy on various simulation and real-world datasets. Using two domains--a robot arm and a humanoid--across diverse tasks, we demonstrate that simulation data can enhance real-world task performance by an average of 38%, even with notable differences between the simulation and real-world data. Videos and additional results can be found at https://co-training.github.io/
BiGym: A Demo-Driven Mobile Bi-Manual Manipulation Benchmark
Jul 11, 2024



We introduce BiGym, a new benchmark and learning environment for mobile bi-manual demo-driven robotic manipulation. BiGym features 40 diverse tasks set in home environments, ranging from simple target reaching to complex kitchen cleaning. To capture the real-world performance accurately, we provide human-collected demonstrations for each task, reflecting the diverse modalities found in real-world robot trajectories. BiGym supports a variety of observations, including proprioceptive data and visual inputs such as RGB, and depth from 3 camera views. To validate the usability of BiGym, we thoroughly benchmark the state-of-the-art imitation learning algorithms and demo-driven reinforcement learning algorithms within the environment and discuss the future opportunities.
Development of MirrorShape: High Fidelity Large-Scale Shape Rendering Framework for Virtual Reality
Nov 18, 2019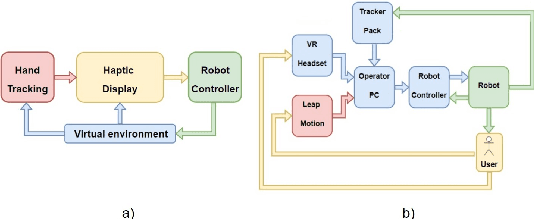
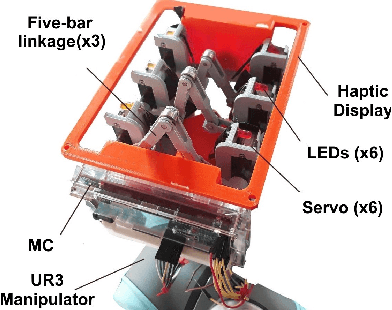
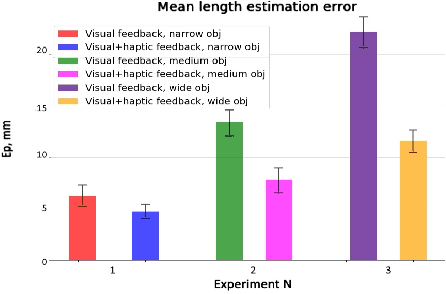
Today there is a high variety of haptic devices capable of providing tactile feedback. Although most of existing designs are aimed at realistic simulation of the surface properties, their capabilities are limited in attempts of displaying shape and position of virtual objects. This paper suggests a new concept of distributed haptic display for realistic interaction with virtual object of complex shape by a collaborative robot with shape display end-effector. MirrorShape renders the 3D object in virtual reality (VR) system by contacting the user hands with the robot end-effector at the calculated point in real-time. Our proposed system makes it possible to synchronously merge the position of contact point in VR and end-effector in real world. This feature provides presentation of different shapes, and at the same time expands the working area comparing to desktop solutions. The preliminary user study revealed that MirrorShape was effective at reducing positional error in VR interactions. Potentially this approach can be used in the virtual systems for rendering versatile VR objects with wide range of sizes with high fidelity large-scaleshape experience.