 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeE-TTS: A New Embodied Test-Time Scaling Framework for Robotic Manipulation
Jun 25, 2026Recently, a few works have made early attempts to study test-time scaling for embodied tasks. However, two major challenges remain unsolved: (1) reasoning can effectively improve the performance of the policy, but its scaling mechanism has seldom been studied; (2) historical information is essential, as embodied tasks are inherently long-horizon and sequential, making sole reliance on current observations for action scaling inadequate due to the lack of historical context utilization. To address these challenges, we introduce E-TTS, a modular and plug-and-play Embodied Test-Time Scaling framework that unifies reasoning and action scaling for robotic manipulation via history-aware iterative refinement with vision-language verifiers. To support joint reasoning-action scaling, E-TTS performs reasoning-action joint sampling and scoring in a pairwise manner. To better utilize historical information, E-TTS uses a history buffer to store historical context, which is then used by reasoning and action verifiers to evaluate the sampled candidates. Unlike conventional open-loop TTS methods, E-TTS introduces feedback generation into the sampling process to form a closed-loop iterative refinement mechanism, enhancing both inference efficiency and environmental adaptability. Each component functions as an independent and composable module, allowing flexible and adaptive configuration depending on task requirements. To evaluate the advantages of our framework, we conduct experiments across 4 different benchmarks, 6 environments, 3 embodiments, and 4 base vision-language-action models. The experimental results demonstrate that, without requiring additional expert data collection or retraining, E-TTS consistently improves performance, achieving up to a 33.14% increase in simulation and 26.62% in real-world scenarios.
WAM-Nav: Asymmetric Latent World-Action Modeling for Unified Visual Navigation
Jun 03, 2026Visual navigation requires generating smooth and collision-free trajectories under complex geometric and physical constraints. Existing reactive policies that directly map observations to actions lack anticipatory reasoning, limiting their ability to proactively avoid obstacles. While visual imagination offers predictive foresight, conventional modular approaches separate scene prediction from policy learning, often leading to error accumulation and inefficient inference. To address these limitations, we propose WAM-Nav, a Latent World-Action Model for embodied visual navigation that jointly learns action generation and latent visual foresight, enabling more robust and foresighted navigation decisions without compromising inference efficiency. Specifically, WAM-Nav utilizes a shared Diffusion Transformer for asymmetric joint diffusion to concurrently generate long-horizon actions and short-horizon visual foresight, reducing the inference latency and visual error accumulation inherent in multi-step autoregressive rollouts. To further encourage smooth and consistent trajectory generation, we introduce a dual-stream contextual conditioning mechanism that integrates episode-level ego-motion history with sequential visual observations. Combined with a unified goal alignment module that preserves balanced representations across goal types, WAM-Nav naturally supports Image-Goal, Point-Goal, and No-Goal exploration within a single policy. Extensive experiments on the challenging ClutterScenes and InternScenes benchmarks demonstrate strong generalization of WAM-Nav, particularly on Image-Goal and Point-Goal navigation, where it improves success rates by 15.7% and 3.3%, respectively. Real-world deployment further validates effective zero-shot sim-to-real transfer, achieving an average 85% task success rate across diverse indoor and outdoor environments.
SKIP: Sparse Keyframe Interpolation Paradigm for Efficient Embodied World Models
May 30, 2026Embodied world models have emerged as a promising paradigm in robotics by predicting how robot actions affect the surrounding scene. However, the rollout inference remains computationally expensive in pixel space, as long-horizon manipulation videos typically have to be generated frame by frame. This cost cannot be easily reduced by indiscriminately dropping frames, since downstream policies rely on complete preservation of sparse task-relevant events such as approach, contact, grasp, and release. To address this challenge, we propose Sparse Keyframe Interpolation Paradigm (SKIP), an event-preserving sparse-to-dense framework that avoids dense frame-by-frame generation. SKIP first identifies task-relevant keyframes by leveraging robot-aware multimodal features. It then synthesizes only these keyframes with a sparse video diffusion model. A learned gap predictor and an action-conditioned interpolator subsequently reconstruct the missing intervals according to the robot actions. On LIBERO, SKIP generates dense rollouts $4.16\times$ faster than a dense baseline while improving visual fidelity and reducing aggregate FVD by $89.0\%$. Importantly, SKIP-generated videos are effective policy-training data. Even when they fully replace real demonstrations, $π_{0.5}$ success drops only $1.3$ pp in LIBERO simulation and $6.7$ pp on the real robot, whereas fully dense frame-by-frame generation collapses by $48$ to $58$ pp.
Multi-View Video Diffusion Policy: A 3D Spatio-Temporal-Aware Video Action Model
Apr 03, 2026Robotic manipulation requires understanding both the 3D spatial structure of the environment and its temporal evolution, yet most existing policies overlook one or both. They typically rely on 2D visual observations and backbones pretrained on static image--text pairs, resulting in high data requirements and limited understanding of environment dynamics. To address this, we introduce MV-VDP, a multi-view video diffusion policy that jointly models the 3D spatio-temporal state of the environment. The core idea is to simultaneously predict multi-view heatmap videos and RGB videos, which 1) align the representation format of video pretraining with action finetuning, and 2) specify not only what actions the robot should take, but also how the environment is expected to evolve in response to those actions. Extensive experiments show that MV-VDP enables data-efficient, robust, generalizable, and interpretable manipulation. With only ten demonstration trajectories and without additional pretraining, MV-VDP successfully performs complex real-world tasks, demonstrates strong robustness across a range of model hyperparameters, generalizes to out-of-distribution settings, and predicts realistic future videos. Experiments on Meta-World and real-world robotic platforms demonstrate that MV-VDP consistently outperforms video-prediction--based, 3D-based, and vision--language--action models, establishing a new state of the art in data-efficient multi-task manipulation.
FloorPlan-VLN: A New Paradigm for Floor Plan Guided Vision-Language Navigation
Mar 18, 2026Existing Vision-Language Navigation (VLN) task requires agents to follow verbose instructions, ignoring some potentially useful global spatial priors, limiting their capability to reason about spatial structures. Although human-readable spatial schematics (e.g., floor plans) are ubiquitous in real-world buildings, current agents lack the cognitive ability to comprehend and utilize them. To bridge this gap, we introduce \textbf{FloorPlan-VLN}, a new paradigm that leverages structured semantic floor plans as global spatial priors to enable navigation with only concise instructions. We first construct the FloorPlan-VLN dataset, which comprises over 10k episodes across 72 scenes. It pairs more than 100 semantically annotated floor plans with Matterport3D-based navigation trajectories and concise instructions that omit step-by-step guidance. Then, we propose a simple yet effective method \textbf{FP-Nav} that uses a dual-view, spatio-temporally aligned video sequence, and auxiliary reasoning tasks to align observations, floor plans, and instructions. When evaluated under this new benchmark, our method significantly outperforms adapted state-of-the-art VLN baselines, achieving more than a 60\% relative improvement in navigation success rate. Furthermore, comprehensive noise modeling and real-world deployments demonstrate the feasibility and robustness of FP-Nav to actuation drift and floor plan distortions. These results validate the effectiveness of floor plan guided navigation and highlight FloorPlan-VLN as a promising step toward more spatially intelligent navigation.
BridgeV2W: Bridging Video Generation Models to Embodied World Models via Embodiment Masks
Feb 03, 2026Embodied world models have emerged as a promising paradigm in robotics, most of which leverage large-scale Internet videos or pretrained video generation models to enrich visual and motion priors. However, they still face key challenges: a misalignment between coordinate-space actions and pixel-space videos, sensitivity to camera viewpoint, and non-unified architectures across embodiments. To this end, we present BridgeV2W, which converts coordinate-space actions into pixel-aligned embodiment masks rendered from the URDF and camera parameters. These masks are then injected into a pretrained video generation model via a ControlNet-style pathway, which aligns the action control signals with predicted videos, adds view-specific conditioning to accommodate camera viewpoints, and yields a unified world model architecture across embodiments. To mitigate overfitting to static backgrounds, BridgeV2W further introduces a flow-based motion loss that focuses on learning dynamic and task-relevant regions. Experiments on single-arm (DROID) and dual-arm (AgiBot-G1) datasets, covering diverse and challenging conditions with unseen viewpoints and scenes, show that BridgeV2W improves video generation quality compared to prior state-of-the-art methods. We further demonstrate the potential of BridgeV2W on downstream real-world tasks, including policy evaluation and goal-conditioned planning. More results can be found on our project website at https://BridgeV2W.github.io .
EgoDemoGen: Novel Egocentric Demonstration Generation Enables Viewpoint-Robust Manipulation
Sep 26, 2025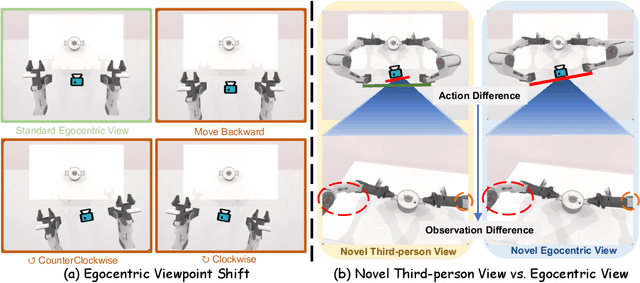

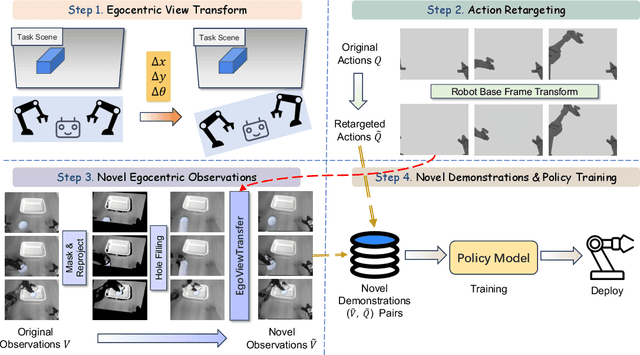
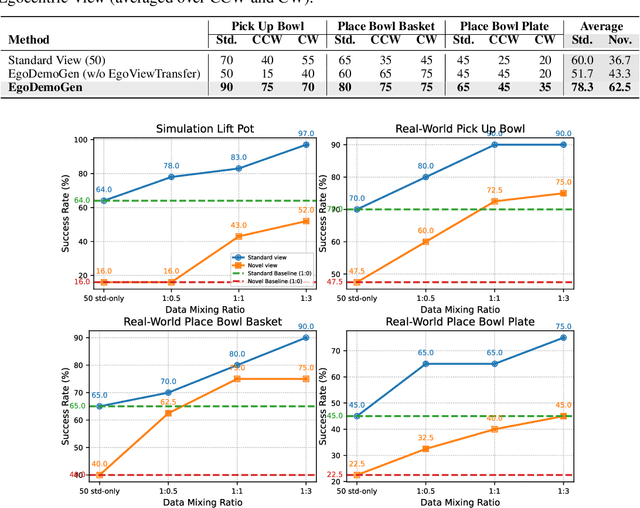
Imitation learning based policies perform well in robotic manipulation, but they often degrade under *egocentric viewpoint shifts* when trained from a single egocentric viewpoint. To address this issue, we present **EgoDemoGen**, a framework that generates *paired* novel egocentric demonstrations by retargeting actions in the novel egocentric frame and synthesizing the corresponding egocentric observation videos with proposed generative video repair model **EgoViewTransfer**, which is conditioned by a novel-viewpoint reprojected scene video and a robot-only video rendered from the retargeted joint actions. EgoViewTransfer is finetuned from a pretrained video generation model using self-supervised double reprojection strategy. We evaluate EgoDemoGen on both simulation (RoboTwin2.0) and real-world robot. After training with a mixture of EgoDemoGen-generated novel egocentric demonstrations and original standard egocentric demonstrations, policy success rate improves **absolutely** by **+17.0%** for standard egocentric viewpoint and by **+17.7%** for novel egocentric viewpoints in simulation. On real-world robot, the **absolute** improvements are **+18.3%** and **+25.8%**. Moreover, performance continues to improve as the proportion of EgoDemoGen-generated demonstrations increases, with diminishing returns. These results demonstrate that EgoDemoGen provides a practical route to egocentric viewpoint-robust robotic manipulation.