 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState Estimation for Human Motion and Humanoid Locomotion
Jun 08, 2022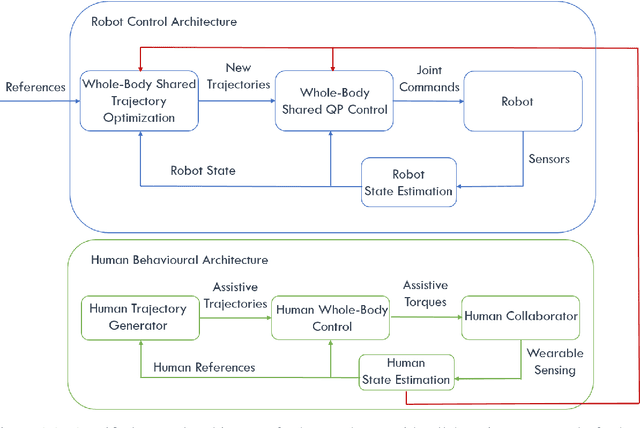
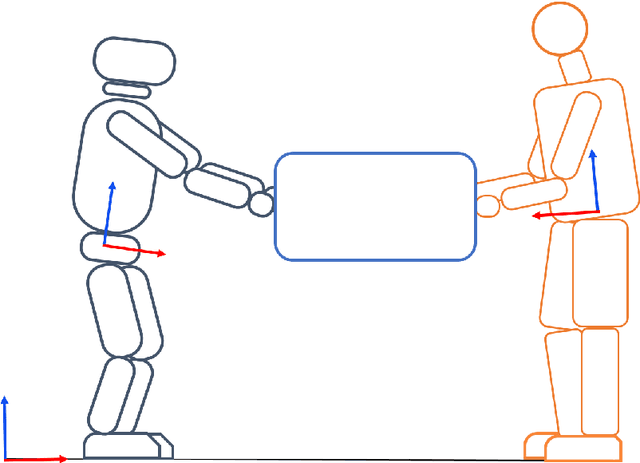
The future where the industrial shop-floors witness humans and robots working in unison and the domestic households becoming a shared space for both these agents is not very far. The scientific community has been accelerating towards that future by extending their research efforts in human-robot interaction towards human-robot collaboration. It is possible that the anthropomorphic nature of the humanoid robots could deem the most suitable for such collaborations in semi-structured, human-centered environments. Wearable sensing technologies for human agents and efficient human-aware control strategies for the humanoid robot will be key in achieving a seamless human-humanoid collaboration. This is where reliable state estimation strategies become crucial in making sense of the information coming from multiple distributed sensors attached to the human and those on the robot to augment the feedback controllers designed for the humanoid robot to aid their human counterparts. In this context, this thesis investigates the theory of Lie groups for designing state estimation techniques aimed towards humanoid locomotion and human motion estimation. [continued]
Whole-Body Human Kinematics Estimation using Dynamical Inverse Kinematics and Contact-Aided Lie Group Kalman Filter
May 16, 2022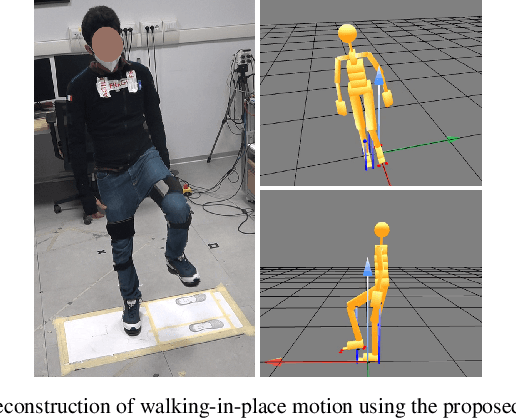
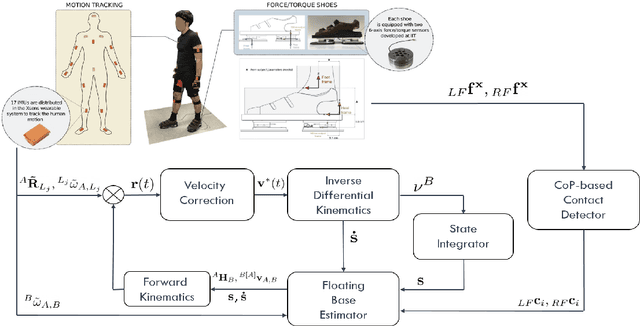
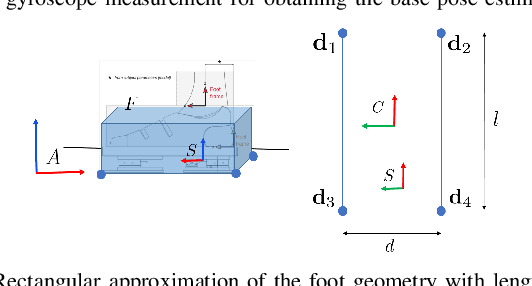
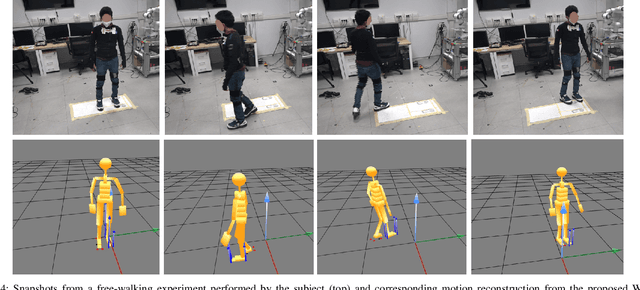
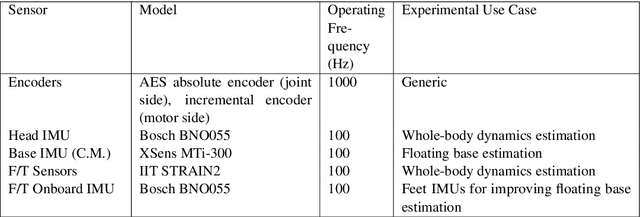
Full-body motion estimation of a human through wearable sensing technologies is challenging in the absence of position sensors. This paper contributes to the development of a model-based whole-body kinematics estimation algorithm using wearable distributed inertial and force-torque sensing. This is done by extending the existing dynamical optimization-based Inverse Kinematics (IK) approach for joint state estimation, in cascade, to include a center of pressure-based contact detector and a contact-aided Kalman filter on Lie groups for floating base pose estimation. The proposed method is tested in an experimental scenario where a human equipped with a sensorized suit and shoes performs walking motions. The proposed method is demonstrated to obtain a reliable reconstruction of the whole-body human motion.
An Experimental Comparison of Floating Base Estimators for Humanoid Robots with Flat Feet
May 16, 2022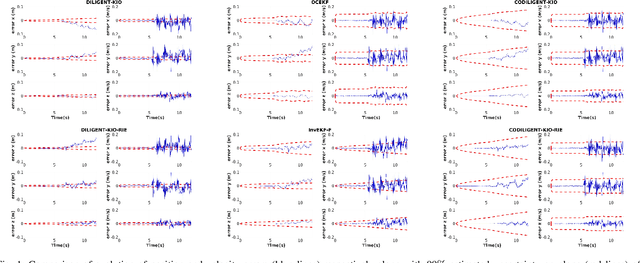
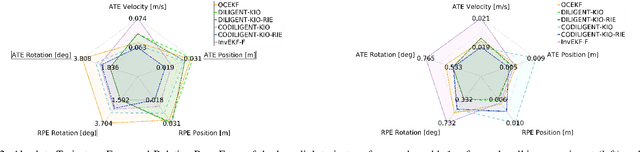
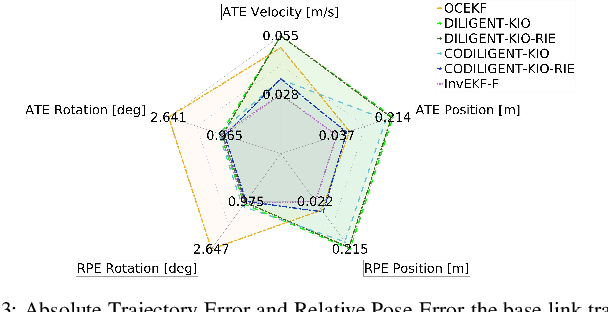
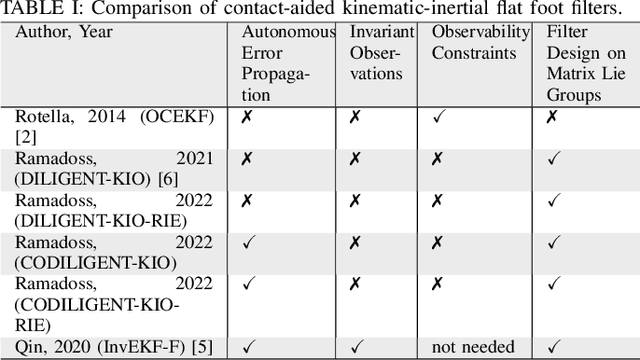
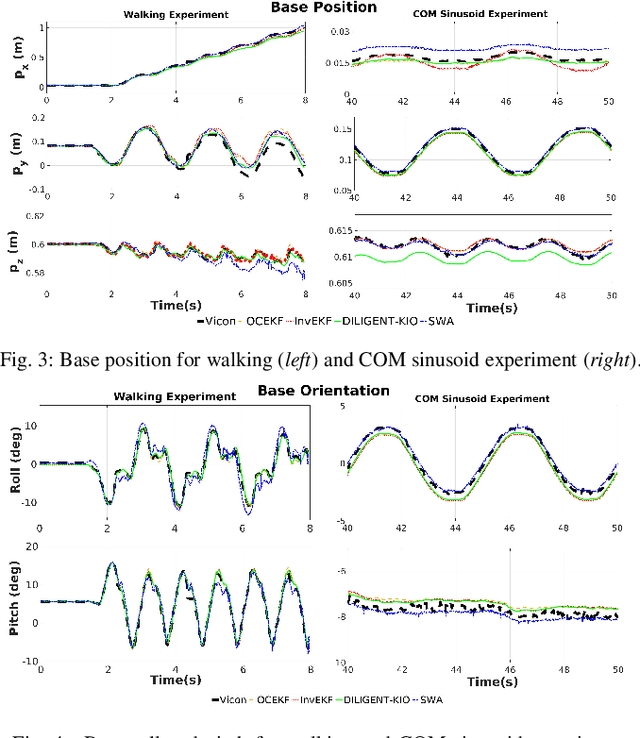
Extended Kalman filtering is a common approach to achieve floating base estimation of a humanoid robot. These filters rely on measurements from an Inertial Measurement Unit (IMU) and relative forward kinematics for estimating the base position-and-orientation and its linear velocity along with the augmented states of feet position-and-orientation, thus giving them their name, flat-foot filters. However, the availability of only partial measurements often poses the question of consistency in the filter design. In this paper, we perform an experimental comparison of state-of-the-art flat-foot filters based on the representation choice of state, observation, matrix Lie group error and system dynamics evaluated for filter consistency and trajectory errors. The comparison is performed over simulated and real-world experiments conducted on the iCub humanoid platform.
DILIGENT-KIO: A Proprioceptive Base Estimator for Humanoid Robots using Extended Kalman Filtering on Matrix Lie Groups
May 31, 2021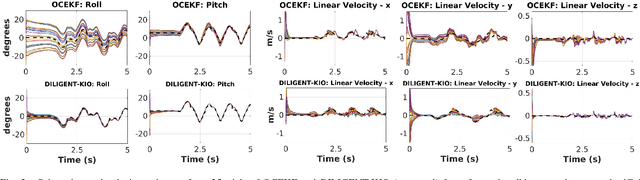


This paper presents a contact-aided inertial-kinematic floating base estimation for humanoid robots considering an evolution of the state and observations over matrix Lie groups. This is achieved through the application of a geometrically meaningful estimator which is characterized by concentrated Gaussian distributions. The configuration of a floating base system like a humanoid robot usually requires the knowledge of an additional six degrees of freedom which describes its base position-and-orientation. This quantity usually cannot be measured and needs to be estimated. A matrix Lie group, encapsulating the position-and-orientation and linear velocity of the base link, feet positions-and-orientations and Inertial Measurement Units' biases, is used to represent the state while relative positions-and-orientations of contact feet from forward kinematics are used as observations. The proposed estimator exhibits fast convergence for large initialization errors owing to choice of uncertainty parametrization. An experimental validation is done on the iCub humanoid platform.
A Benchmarking of DCM Based Architectures for Position, Velocity and Torque Controlled Humanoid Robots
Nov 27, 2019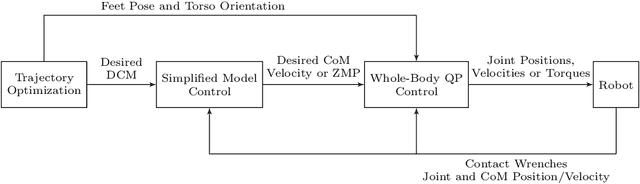

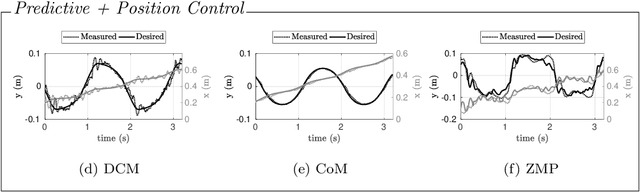

This paper contributes towards the benchmarking of control architectures for bipedal robot locomotion. It considers architectures that are based on the Divergent Component of Motion (DCM) and composed of three main layers: trajectory optimization, simplified model control, and whole-body QP control layer. While the first two layers use simplified robot models, the whole-body QP control layer uses a complete robot model to produce either desired positions, velocities, or torques inputs at the joint-level. This paper then compares two implementations of the simplified model control layer, which are tested with position, velocity, and torque control modes for the whole-body QP control layer. In particular, both an instantaneous and a Receding Horizon controller are presented for the simplified model control layer. We show also that one of the proposed architectures allows the humanoid robot iCub to achieve a forward walking velocity of 0.3372 meters per second, which is the highest walking velocity achieved by the iCub robot.