 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom CAD to URDF: Co-Design of a Jet-Powered Humanoid Robot Including CAD Geometry
Oct 11, 2024



Co-design optimization strategies usually rely on simplified robot models extracted from CAD. While these models are useful for optimizing geometrical and inertial parameters for robot control, they might overlook important details essential for prototyping the optimized mechanical design. For instance, they may not account for mechanical stresses exerted on the optimized geometries and the complexity of assembly-level design. In this paper, we introduce a co-design framework aimed at improving both the control performance and mechanical design of our robot. Specifically, we identify the robot links that significantly influence control performance. The geometric characteristics of these links are parameterized and optimized using a multi-objective evolutionary algorithm to achieve optimal control performance. Additionally, an automated Finite Element Method (FEM) analysis is integrated into the framework to filter solutions not satisfying the required structural safety margin. We validate the framework by applying it to enhance the mechanical design for flight performance of the jet-powered humanoid robot iRonCub.
Fron CAD to URDF: Co-Design of a Jet-Powered Humanoid Robot Including CAD Geometry
Oct 10, 2024Co-design optimization strategies usually rely on simplified robot models extracted from CAD. While these models are useful for optimizing geometrical and inertial parameters for robot control, they might overlook important details essential for prototyping the optimized mechanical design. For instance, they may not account for mechanical stresses exerted on the optimized geometries and the complexity of assembly-level design. In this paper, we introduce a co-design framework aimed at improving both the control performance and mechanical design of our robot. Specifically, we identify the robot links that significantly influence control performance. The geometric characteristics of these links are parameterized and optimized using a multi-objective evolutionary algorithm to achieve optimal control performance. Additionally, an automated Finite Element Method (FEM) analysis is integrated into the framework to filter solutions not satisfying the required structural safety margin. We validate the framework by applying it to enhance the mechanical design for flight performance of the jet-powered humanoid robot iRonCub.
Nonlinear In-situ Calibration of Strain-Gauge Force/Torque Sensors for Humanoid Robots
Dec 15, 2023



High force/torque (F/T) sensor calibration accuracy is crucial to achieving successful force estimation/control tasks with humanoid robots. State-of-the-art affine calibration models do not always approximate correctly the physical phenomenon of the sensor/transducer, resulting in inaccurate F/T measurements for specific applications such as thrust estimation of a jet-powered humanoid robot. This paper proposes and validates nonlinear polynomial models for F/T calibration, increasing the number of model coefficients to minimize the estimation residuals. The analysis of several models, based on the data collected from experiments with the iCub3 robot, shows a significant improvement in minimizing the force/torque estimation error when using higher-degree polynomials. In particular, when using a 4th-degree polynomial model, the Root Mean Square error (RMSE) decreased to 2.28N from the 4.58N obtained with an affine model, and the absolute error in the forces remained under 6N while it was reaching up to 16N with the affine model.
Co-Design Optimisation of Morphing Topology and Control of Winged Drones
Sep 25, 2023



The design and control of winged aircraft and drones is an iterative process aimed at identifying a compromise of mission-specific costs and constraints. When agility is required, shape-shifting (morphing) drones represent an efficient solution. However, morphing drones require the addition of actuated joints that increase the topology and control coupling, making the design process more complex. We propose a co-design optimisation method that assists the engineers by proposing a morphing drone's conceptual design that includes topology, actuation, morphing strategy, and controller parameters. The method consists of applying multi-objective constraint-based optimisation to a multi-body winged drone with trajectory optimisation to solve the motion intelligence problem under diverse flight mission requirements. We show that co-designed morphing drones outperform fixed-winged drones in terms of energy efficiency and agility, suggesting that the proposed co-design method could be a useful addition to the aircraft engineering toolbox.
Learning to Walk and Fly with Adversarial Motion Priors
Sep 22, 2023



Robot multimodal locomotion encompasses the ability to transition between walking and flying, representing a significant challenge in robotics. This work presents an approach that enables automatic smooth transitions between legged and aerial locomotion. Leveraging the concept of Adversarial Motion Priors, our method allows the robot to imitate motion datasets and accomplish the desired task without the need for complex reward functions. The robot learns walking patterns from human-like gaits and aerial locomotion patterns from motions obtained using trajectory optimization. Through this process, the robot adapts the locomotion scheme based on environmental feedback using reinforcement learning, with the spontaneous emergence of mode-switching behavior. The results highlight the potential for achieving multimodal locomotion in aerial humanoid robotics through automatic control of walking and flying modes, paving the way for applications in diverse domains such as search and rescue, surveillance, and exploration missions. This research contributes to advancing the capabilities of aerial humanoid robots in terms of versatile locomotion in various environments.
Failure Detection and Fault Tolerant Control of a Jet-Powered Flying Humanoid Robot
May 25, 2023



Failure detection and fault tolerant control are fundamental safety features of any aerial vehicle. With the emergence of complex, multi-body flying systems such as jet-powered humanoid robots, it becomes of crucial importance to design fault detection and control strategies for these systems, too. In this paper we propose a fault detection and control framework for the flying humanoid robot iRonCub in case of loss of one turbine. The framework is composed of a failure detector based on turbines rotational speed, a momentum-based flight control for fault response, and an offline reference generator that produces far-from-singularities configurations and accounts for self and jet exhausts collision avoidance. Simulation results with Gazebo and MATLAB prove the effectiveness of the proposed control strategy.
Online Non-linear Centroidal MPC for Humanoid Robots Payload Carrying with Contact-Stable Force Parametrization
May 18, 2023



In this paper we consider the problem of allowing a humanoid robot that is subject to a persistent disturbance, in the form of a payload-carrying task, to follow given planned footsteps. To solve this problem, we combine an online nonlinear centroidal Model Predictive Controller - MPC with a contact stable force parametrization. The cost function of the MPC is augmented with terms handling the disturbance and regularizing the parameter. The performance of the resulting controller is validated both in simulations and on the humanoid robot iCub. Finally, the effect of using the parametrization on the computational time of the controller is briefly studied.
Whole-Body Trajectory Optimization for Robot Multimodal Locomotion
Nov 23, 2022



The general problem of planning feasible trajectories for multimodal robots is still an open challenge. This paper presents a whole-body trajectory optimisation approach that addresses this challenge by combining methods and tools developed for aerial and legged robots. First, robot models that enable the presented whole-body trajectory optimisation framework are presented. The key model is the so-called robot centroidal momentum, the dynamics of which is directly related to the models of the robot actuation for aerial and terrestrial locomotion. Then, the paper presents how these models can be employed in an optimal control problem to generate either terrestrial or aerial locomotion trajectories with a unified approach. The optimisation problem considers robot kinematics, momentum, thrust forces and their bounds. The overall approach is validated using the multimodal robot iRonCub, a flying humanoid robot that expresses a degree of terrestrial and aerial locomotion. To solve the associated optimal trajectory generation problem, we employ ADAM, a custom-made open-source library that implements a collection of algorithms for calculating rigid-body dynamics using CasADi.
Modeling and Control of Morphing Covers for the Adaptive Morphology of Humanoid Robots
Jul 05, 2022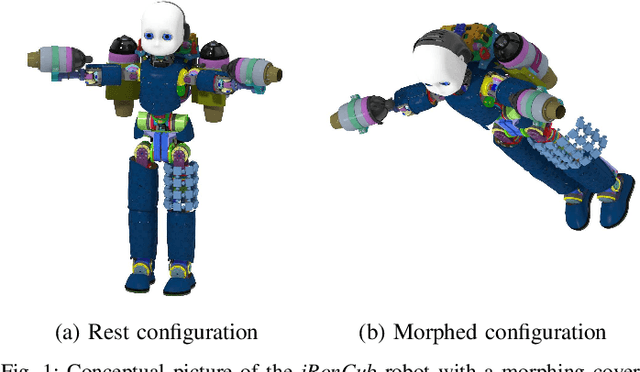
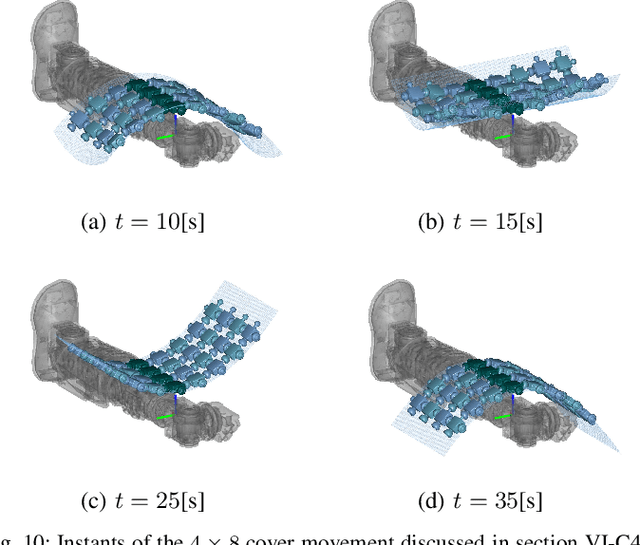
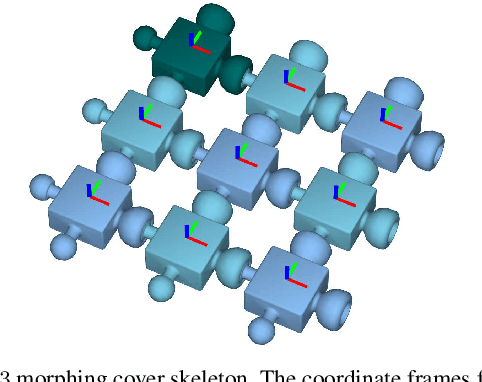
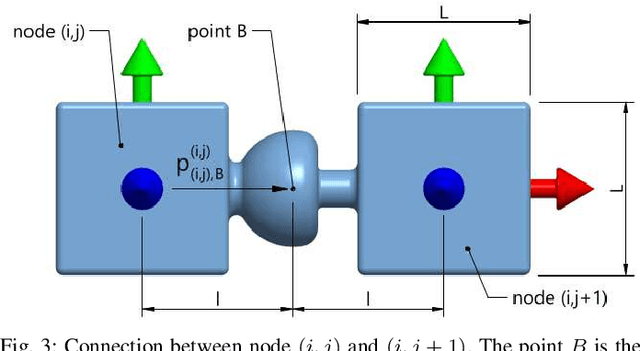
This article takes a step to provide humanoid robots with adaptive morphology abilities. We present a systematic approach for enabling robotic covers to morph their shape, with an overall size fitting the anthropometric dimensions of a humanoid robot. More precisely, we present a cover concept consisting of two main components: a skeleton, which is a repetition of a basic element called node, and a soft membrane, which encloses the cover and deforms with its motion. This article focuses on the cover skeleton and addresses the challenging problems of node design, system modeling, motor positioning, and control design of the morphing system. The cover modeling focuses on kinematics, and a systematic approach for defining the system kinematic constraints is presented. Then, we apply genetic algorithms to find the motor locations so that the morphing cover is fully actuated. Finally, we present control algorithms that allow the cover to morph into a time-varying shape. The entire approach is validated by performing kinematic simulations with four different covers of square dimensions and having 3x3, 4x8, 8x8, and 20x20 nodes, respectively. For each cover, we apply the genetic algorithms to choose the motor locations and perform simulations for tracking a desired shape. The simulation results show that the presented approach ensures the covers to track a desired shape with good tracking performances.
Nonlinear Model Identification and Observer Design for Thrust Estimation of Small-scale Turbojet Engines
May 17, 2022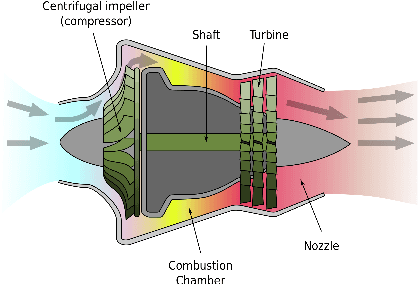
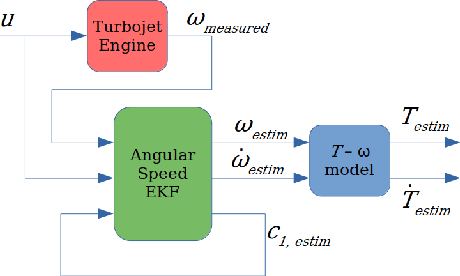
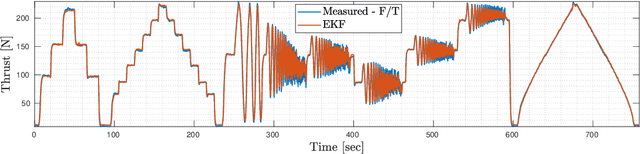
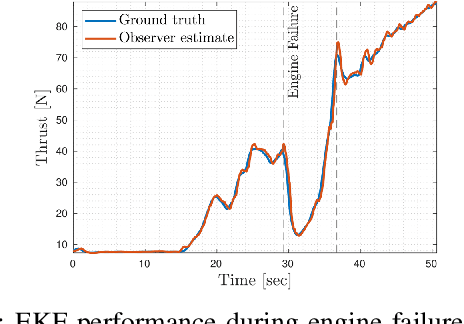
Jet-powered vertical takeoff and landing (VTOL) drones require precise thrust estimation to ensure adequate stability margins and robust maneuvering. Small-scale turbojets have become good candidates for powering heavy aerial drones. However, due to limited instrumentation available in these turbojets, estimating the precise thrust using classical techniques is not straightforward. In this paper, we present a methodology to accurately estimate the online thrust for the small-scale turbojets used on the iRonCub - an aerial humanoid robot. We use a grey-box method to capture the turbojet system dynamics with a nonlinear state-space model based on the data acquired from a custom engine test bench. This model is then used to design an extended Kalman filter that estimates the turbojet thrust only from the angular speed measurements. We exploited the parameter estimation algorithm to ensure that the EKF gives smooth and accurate estimates even at engine failures. The designed EKF was validated on the test bench where the mean absolute error in estimated thrust was found to be within 2% of rated peak thrust.