 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonLab: Person Pose Estimation and Instance Segmentation with a Bottom-Up, Part-Based, Geometric Embedding Model
Mar 22, 2018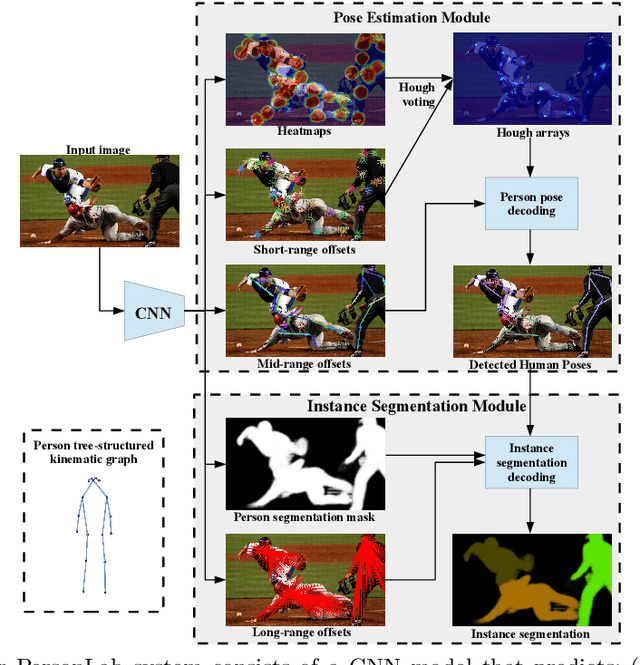
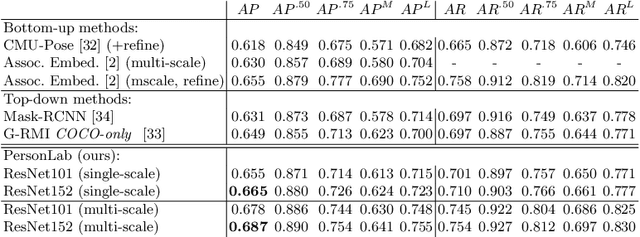
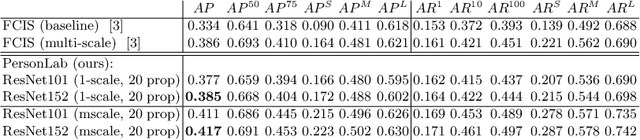
We present a box-free bottom-up approach for the tasks of pose estimation and instance segmentation of people in multi-person images using an efficient single-shot model. The proposed PersonLab model tackles both semantic-level reasoning and object-part associations using part-based modeling. Our model employs a convolutional network which learns to detect individual keypoints and predict their relative displacements, allowing us to group keypoints into person pose instances. Further, we propose a part-induced geometric embedding descriptor which allows us to associate semantic person pixels with their corresponding person instance, delivering instance-level person segmentations. Our system is based on a fully-convolutional architecture and allows for efficient inference, with runtime essentially independent of the number of people present in the scene. Trained on COCO data alone, our system achieves COCO test-dev keypoint average precision of 0.665 using single-scale inference and 0.687 using multi-scale inference, significantly outperforming all previous bottom-up pose estimation systems. We are also the first bottom-up method to report competitive results for the person class in the COCO instance segmentation task, achieving a person category average precision of 0.417.
Improved Image Captioning via Policy Gradient optimization of SPIDEr
Mar 12, 2018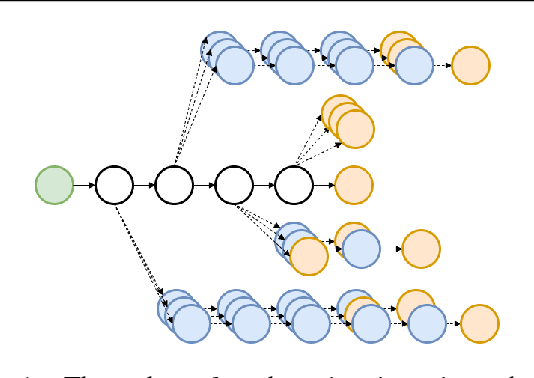
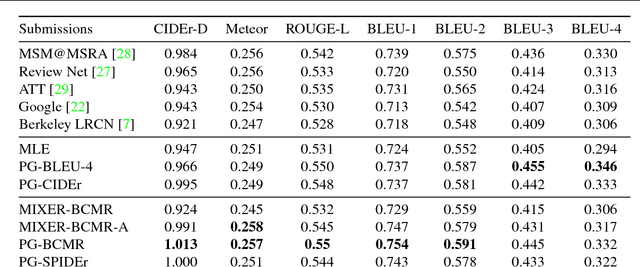
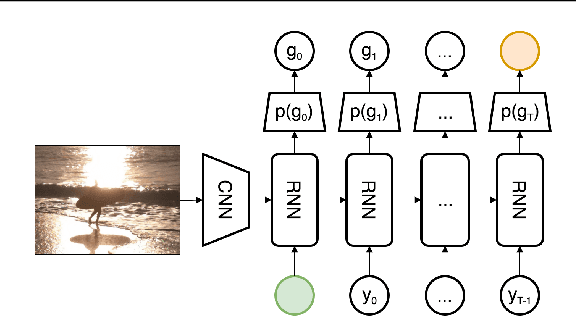
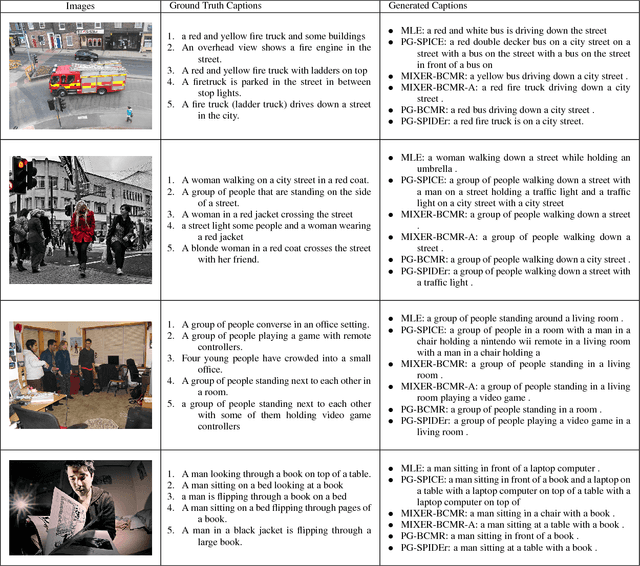
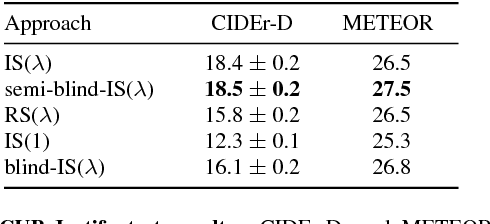
Current image captioning methods are usually trained via (penalized) maximum likelihood estimation. However, the log-likelihood score of a caption does not correlate well with human assessments of quality. Standard syntactic evaluation metrics, such as BLEU, METEOR and ROUGE, are also not well correlated. The newer SPICE and CIDEr metrics are better correlated, but have traditionally been hard to optimize for. In this paper, we show how to use a policy gradient (PG) method to directly optimize a linear combination of SPICE and CIDEr (a combination we call SPIDEr): the SPICE score ensures our captions are semantically faithful to the image, while CIDEr score ensures our captions are syntactically fluent. The PG method we propose improves on the prior MIXER approach, by using Monte Carlo rollouts instead of mixing MLE training with PG. We show empirically that our algorithm leads to easier optimization and improved results compared to MIXER. Finally, we show that using our PG method we can optimize any of the metrics, including the proposed SPIDEr metric which results in image captions that are strongly preferred by human raters compared to captions generated by the same model but trained to optimize MLE or the COCO metrics.
Generative Models of Visually Grounded Imagination
Feb 25, 2018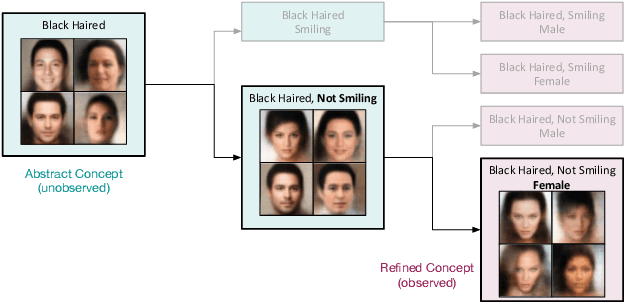
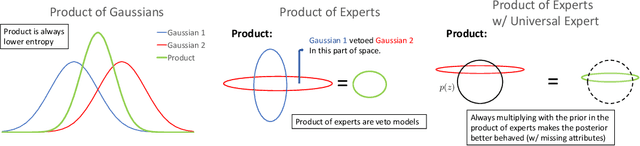
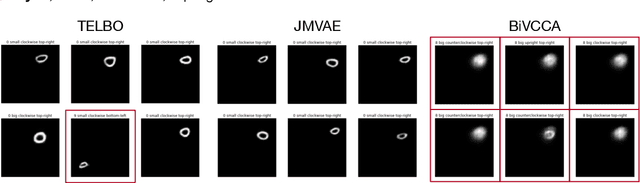
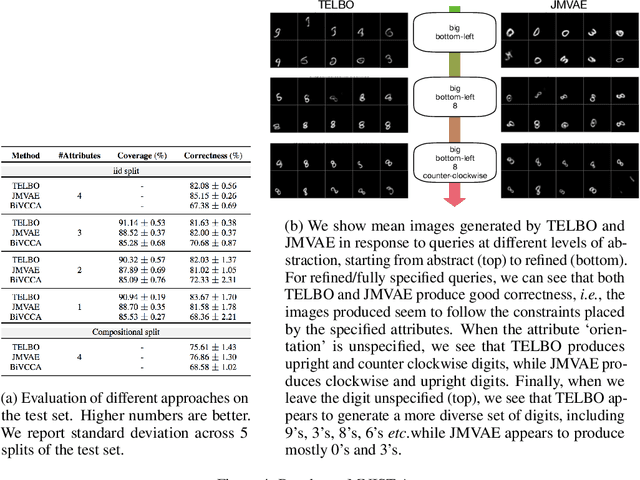
It is easy for people to imagine what a man with pink hair looks like, even if they have never seen such a person before. We call the ability to create images of novel semantic concepts visually grounded imagination. In this paper, we show how we can modify variational auto-encoders to perform this task. Our method uses a novel training objective, and a novel product-of-experts inference network, which can handle partially specified (abstract) concepts in a principled and efficient way. We also propose a set of easy-to-compute evaluation metrics that capture our intuitive notions of what it means to have good visual imagination, namely correctness, coverage, and compositionality (the 3 C's). Finally, we perform a detailed comparison of our method with two existing joint image-attribute VAE methods (the JMVAE method of Suzuki et.al. and the BiVCCA method of Wang et.al.) by applying them to two datasets: the MNIST-with-attributes dataset (which we introduce here), and the CelebA dataset.
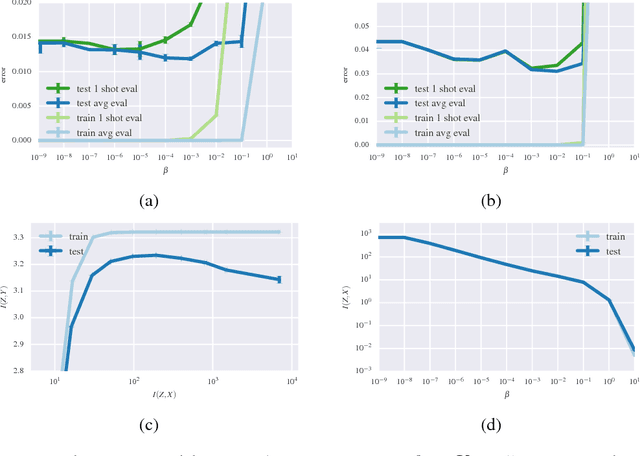
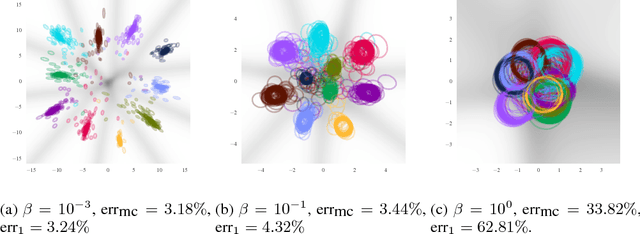
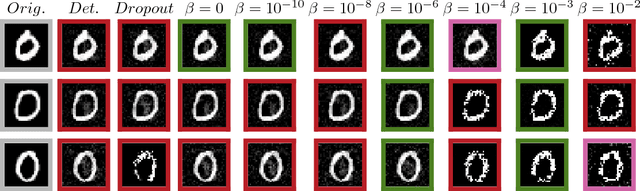
Fixing a Broken ELBO
Feb 13, 2018
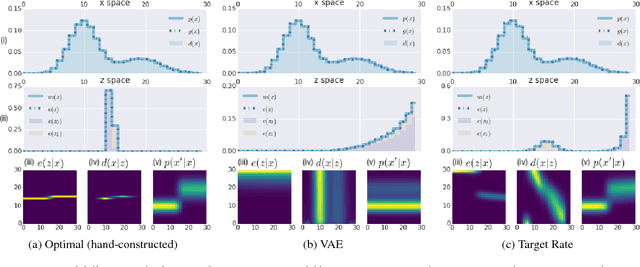
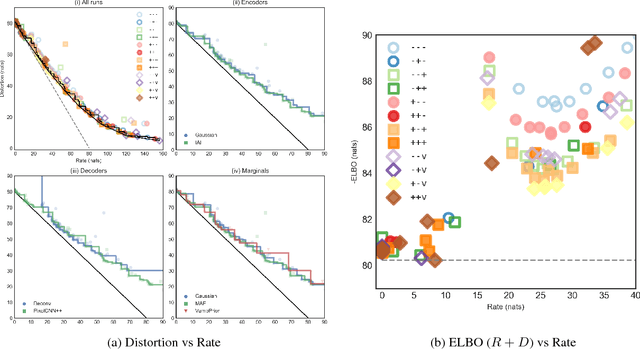
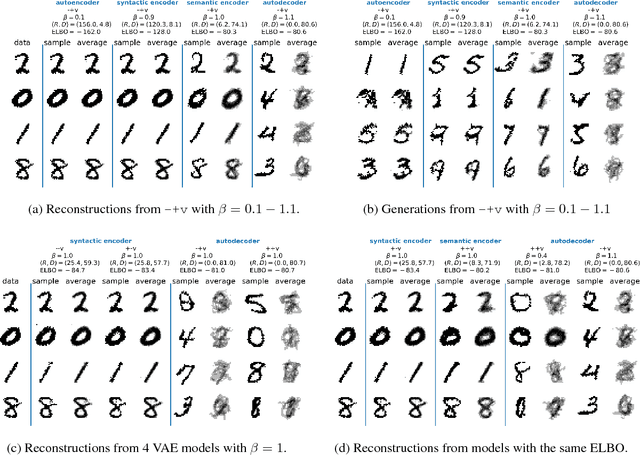
Recent work in unsupervised representation learning has focused on learning deep directed latent-variable models. Fitting these models by maximizing the marginal likelihood or evidence is typically intractable, thus a common approximation is to maximize the evidence lower bound (ELBO) instead. However, maximum likelihood training (whether exact or approximate) does not necessarily result in a good latent representation, as we demonstrate both theoretically and empirically. In particular, we derive variational lower and upper bounds on the mutual information between the input and the latent variable, and use these bounds to derive a rate-distortion curve that characterizes the tradeoff between compression and reconstruction accuracy. Using this framework, we demonstrate that there is a family of models with identical ELBO, but different quantitative and qualitative characteristics. Our framework also suggests a simple new method to ensure that latent variable models with powerful stochastic decoders do not ignore their latent code.
Attention-based Extraction of Structured Information from Street View Imagery
Aug 20, 2017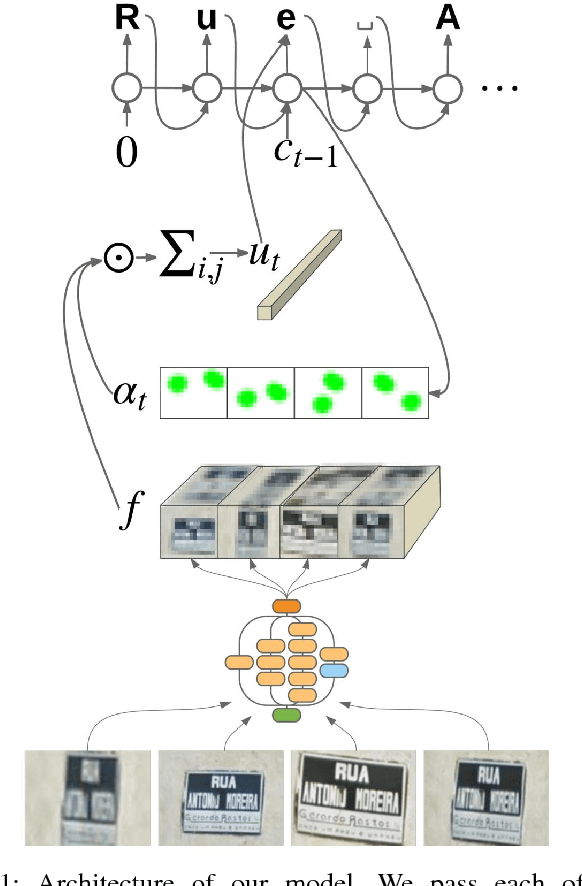
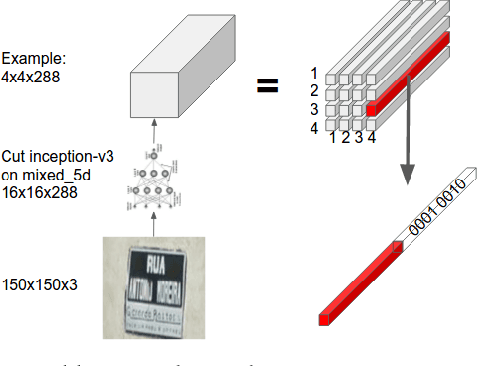
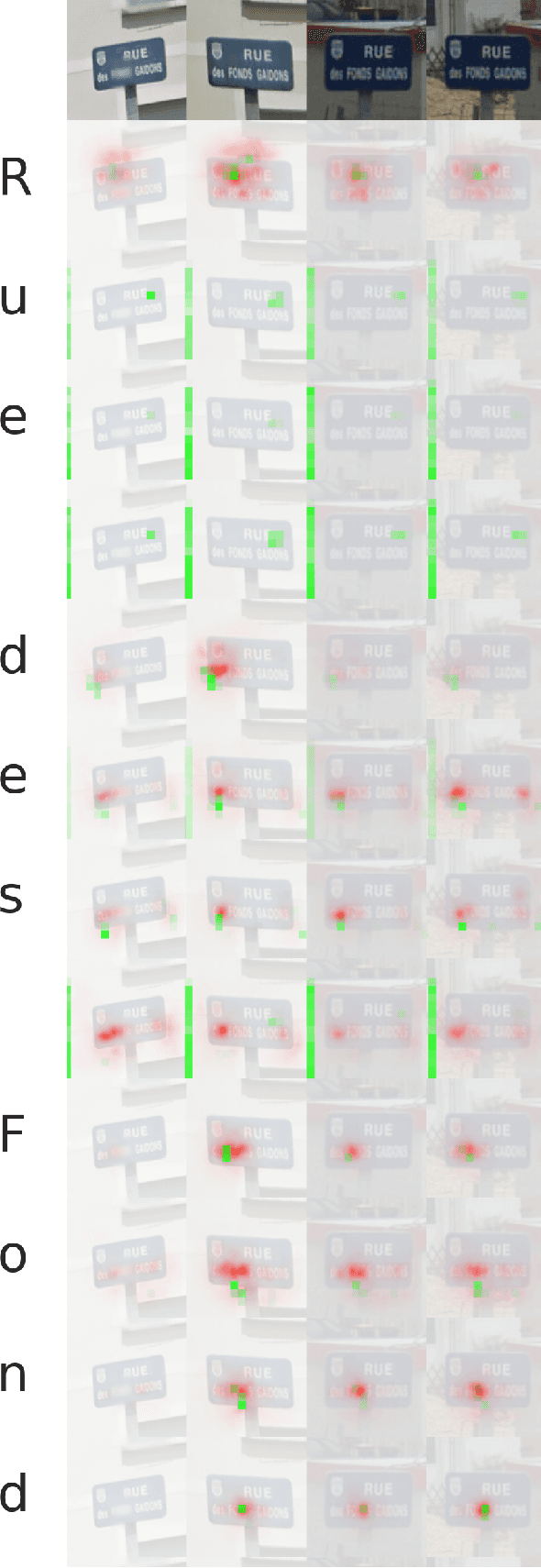
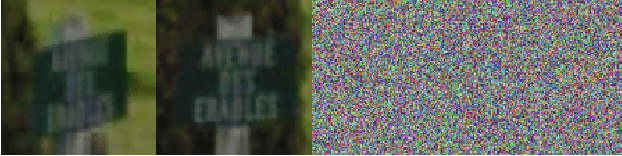
We present a neural network model - based on CNNs, RNNs and a novel attention mechanism - which achieves 84.2% accuracy on the challenging French Street Name Signs (FSNS) dataset, significantly outperforming the previous state of the art (Smith'16), which achieved 72.46%. Furthermore, our new method is much simpler and more general than the previous approach. To demonstrate the generality of our model, we show that it also performs well on an even more challenging dataset derived from Google Street View, in which the goal is to extract business names from store fronts. Finally, we study the speed/accuracy tradeoff that results from using CNN feature extractors of different depths. Surprisingly, we find that deeper is not always better (in terms of accuracy, as well as speed). Our resulting model is simple, accurate and fast, allowing it to be used at scale on a variety of challenging real-world text extraction problems.
Context-aware Captions from Context-agnostic Supervision
Jul 31, 2017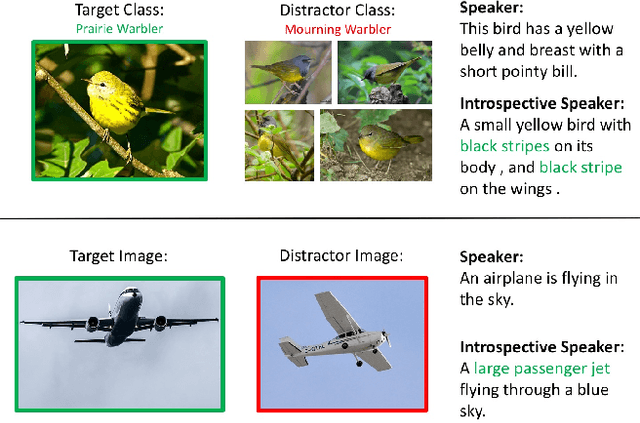
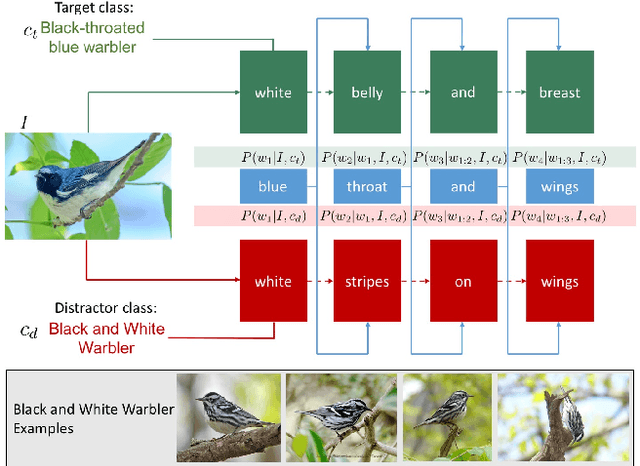
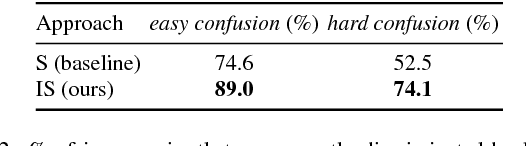
We introduce an inference technique to produce discriminative context-aware image captions (captions that describe differences between images or visual concepts) using only generic context-agnostic training data (captions that describe a concept or an image in isolation). For example, given images and captions of "siamese cat" and "tiger cat", we generate language that describes the "siamese cat" in a way that distinguishes it from "tiger cat". Our key novelty is that we show how to do joint inference over a language model that is context-agnostic and a listener which distinguishes closely-related concepts. We first apply our technique to a justification task, namely to describe why an image contains a particular fine-grained category as opposed to another closely-related category of the CUB-200-2011 dataset. We then study discriminative image captioning to generate language that uniquely refers to one of two semantically-similar images in the COCO dataset. Evaluations with discriminative ground truth for justification and human studies for discriminative image captioning reveal that our approach outperforms baseline generative and speaker-listener approaches for discrimination.
Deep Variational Information Bottleneck
Jul 17, 2017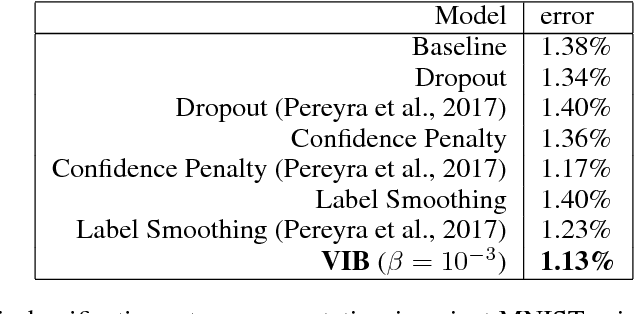
We present a variational approximation to the information bottleneck of Tishby et al. (1999). This variational approach allows us to parameterize the information bottleneck model using a neural network and leverage the reparameterization trick for efficient training. We call this method "Deep Variational Information Bottleneck", or Deep VIB. We show that models trained with the VIB objective outperform those that are trained with other forms of regularization, in terms of generalization performance and robustness to adversarial attack.
PixColor: Pixel Recursive Colorization
Jun 05, 2017
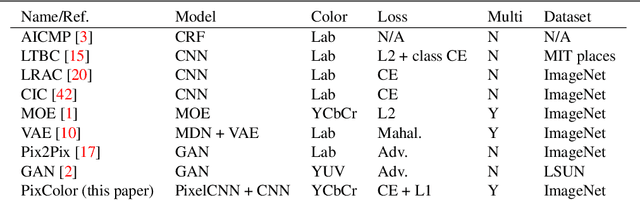
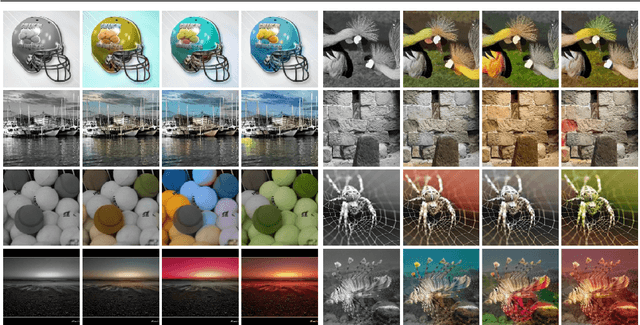
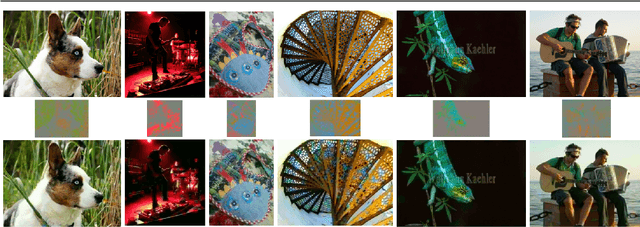
We propose a novel approach to automatically produce multiple colorized versions of a grayscale image. Our method results from the observation that the task of automated colorization is relatively easy given a low-resolution version of the color image. We first train a conditional PixelCNN to generate a low resolution color for a given grayscale image. Then, given the generated low-resolution color image and the original grayscale image as inputs, we train a second CNN to generate a high-resolution colorization of an image. We demonstrate that our approach produces more diverse and plausible colorizations than existing methods, as judged by human raters in a "Visual Turing Test".
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs
May 12, 2017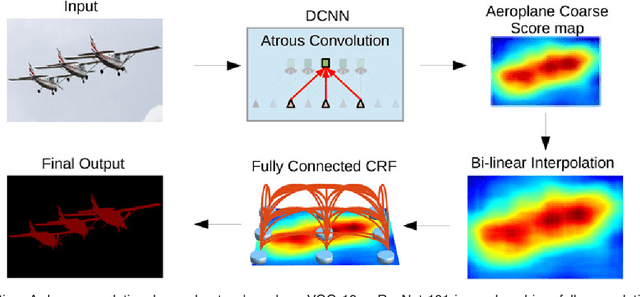
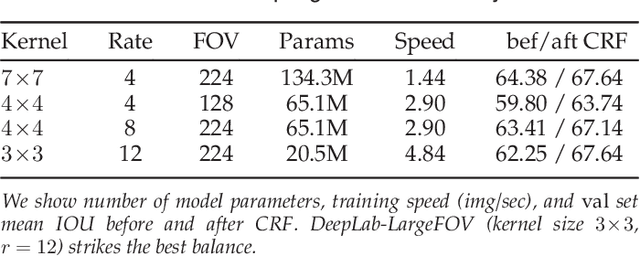
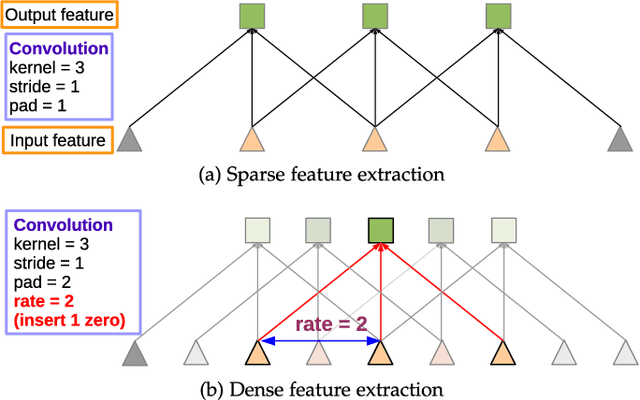
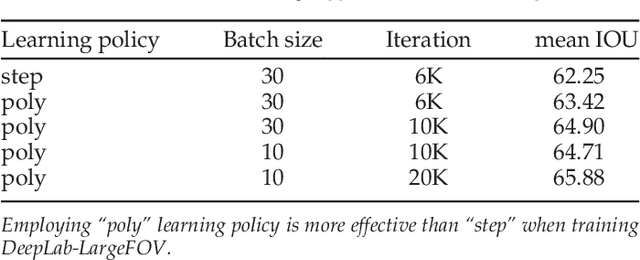
In this work we address the task of semantic image segmentation with Deep Learning and make three main contributions that are experimentally shown to have substantial practical merit. First, we highlight convolution with upsampled filters, or 'atrous convolution', as a powerful tool in dense prediction tasks. Atrous convolution allows us to explicitly control the resolution at which feature responses are computed within Deep Convolutional Neural Networks. It also allows us to effectively enlarge the field of view of filters to incorporate larger context without increasing the number of parameters or the amount of computation. Second, we propose atrous spatial pyramid pooling (ASPP) to robustly segment objects at multiple scales. ASPP probes an incoming convolutional feature layer with filters at multiple sampling rates and effective fields-of-views, thus capturing objects as well as image context at multiple scales. Third, we improve the localization of object boundaries by combining methods from DCNNs and probabilistic graphical models. The commonly deployed combination of max-pooling and downsampling in DCNNs achieves invariance but has a toll on localization accuracy. We overcome this by combining the responses at the final DCNN layer with a fully connected Conditional Random Field (CRF), which is shown both qualitatively and quantitatively to improve localization performance. Our proposed "DeepLab" system sets the new state-of-art at the PASCAL VOC-2012 semantic image segmentation task, reaching 79.7% mIOU in the test set, and advances the results on three other datasets: PASCAL-Context, PASCAL-Person-Part, and Cityscapes. All of our code is made publicly available online.
Speed/accuracy trade-offs for modern convolutional object detectors
Apr 25, 2017
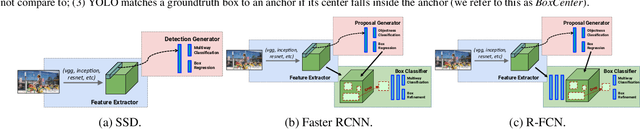
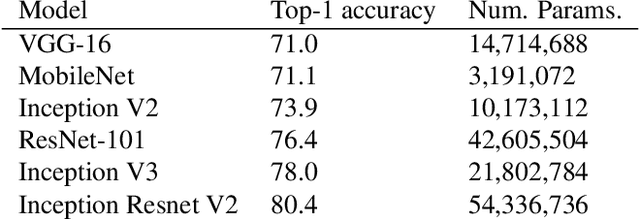
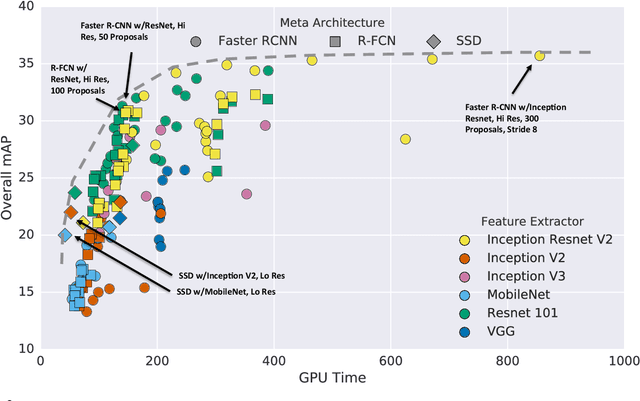
The goal of this paper is to serve as a guide for selecting a detection architecture that achieves the right speed/memory/accuracy balance for a given application and platform. To this end, we investigate various ways to trade accuracy for speed and memory usage in modern convolutional object detection systems. A number of successful systems have been proposed in recent years, but apples-to-apples comparisons are difficult due to different base feature extractors (e.g., VGG, Residual Networks), different default image resolutions, as well as different hardware and software platforms. We present a unified implementation of the Faster R-CNN [Ren et al., 2015], R-FCN [Dai et al., 2016] and SSD [Liu et al., 2015] systems, which we view as "meta-architectures" and trace out the speed/accuracy trade-off curve created by using alternative feature extractors and varying other critical parameters such as image size within each of these meta-architectures. On one extreme end of this spectrum where speed and memory are critical, we present a detector that achieves real time speeds and can be deployed on a mobile device. On the opposite end in which accuracy is critical, we present a detector that achieves state-of-the-art performance measured on the COCO detection task.