 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Riemannian Metric for Geometry-Aware Singularity Avoidance by Articulated Robots
Mar 09, 2021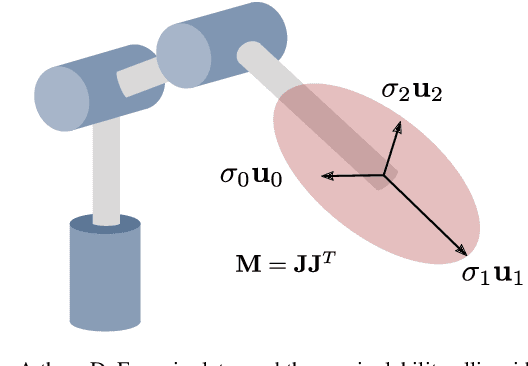
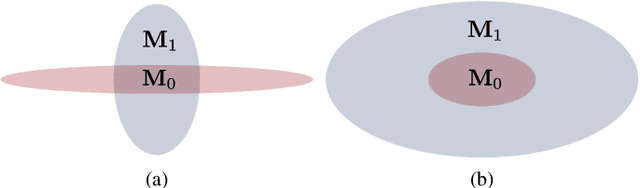
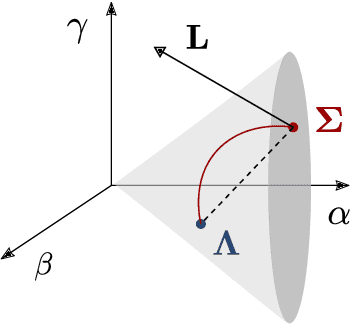
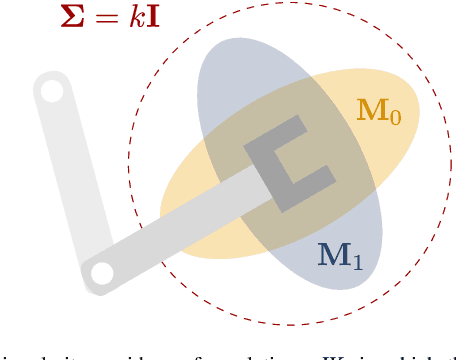
Articulated robots such as manipulators increasingly must operate in uncertain and dynamic environments where interaction (with human coworkers, for example) is necessary. In these situations, the capacity to quickly adapt to unexpected changes in operational space constraints is essential. At certain points in a manipulator's configuration space, termed singularities, the robot loses one or more degrees of freedom (DoF) and is unable to move in specific operational space directions. The inability to move in arbitrary directions in operational space compromises adaptivity and, potentially, safety. We introduce a geometry-aware singularity index,defined using a Riemannian metric on the manifold of symmetric positive definite matrices, to provide a measure of proximity to singular configurations. We demonstrate that our index avoids some of the failure modes and difficulties inherent to other common indices. Further, we show that this index can be differentiated easily, making it compatible with local optimization approaches used for operational space control. Our experimental results establish that, for reaching and path following tasks, optimization based on our index outperforms a common manipulability maximization technique, ensuring singularity-robust motions.
Learned Camera Gain and Exposure Control for Improved Visual Feature Detection and Matching
Feb 28, 2021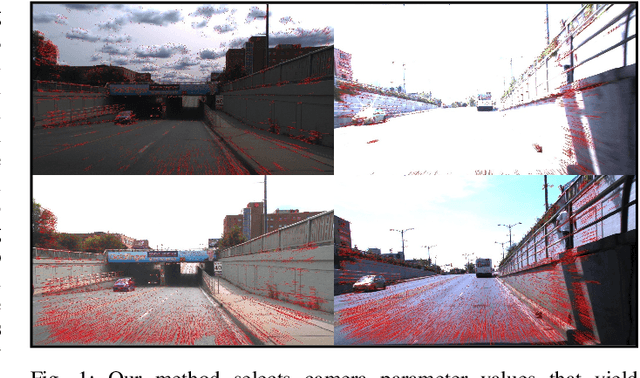
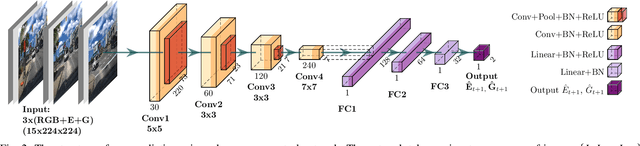
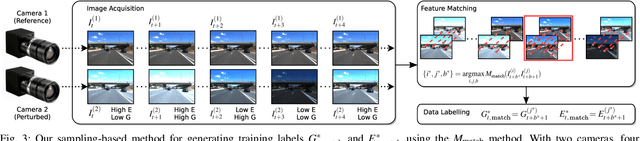
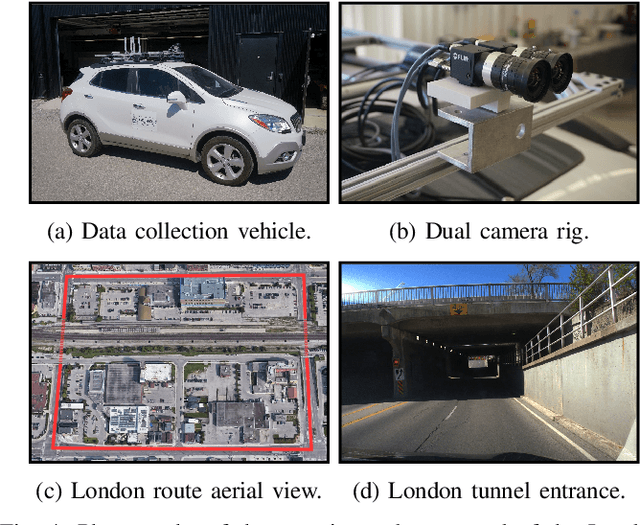
Successful visual navigation depends upon capturing images that contain sufficient useful information. In this paper, we explore a data-driven approach to account for environmental lighting changes, improving the quality of images for use in visual odometry (VO) or visual simultaneous localization and mapping (SLAM). We train a deep convolutional neural network model to predictively adjust camera gain and exposure time parameters such that consecutive images contain a maximal number of matchable features. The training process is fully self-supervised: our training signal is derived from an underlying VO or SLAM pipeline and, as a result, the model is optimized to perform well with that specific pipeline. We demonstrate through extensive real-world experiments that our network can anticipate and compensate for dramatic lighting changes (e.g., transitions into and out of road tunnels), maintaining a substantially higher number of inlier feature matches than competing camera parameter control algorithms.
Inverse Kinematics as Low-Rank Euclidean Distance Matrix Completion
Nov 10, 2020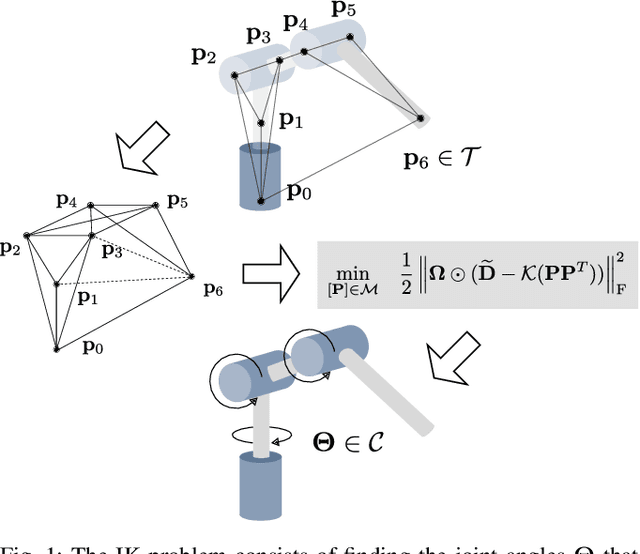
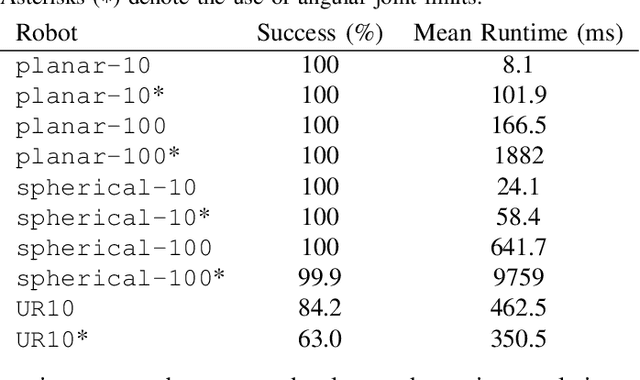
The majority of inverse kinematics (IK) algorithms search for solutions in a configuration space defined by joint angles. However, the kinematics of many robots can also be described in terms of distances between rigidly-attached points, which collectively form a Euclidean distance matrix. This alternative geometric description of the kinematics reveals an elegant equivalence between IK and the problem of low-rank matrix completion. We use this connection to implement a novel Riemannian optimization-based solution to IK for various articulated robots with symmetric joint angle constraints.
Towards a Policy-as-a-Service Framework to Enable Compliant, Trustworthy AI and HRI Systems in the Wild
Oct 06, 2020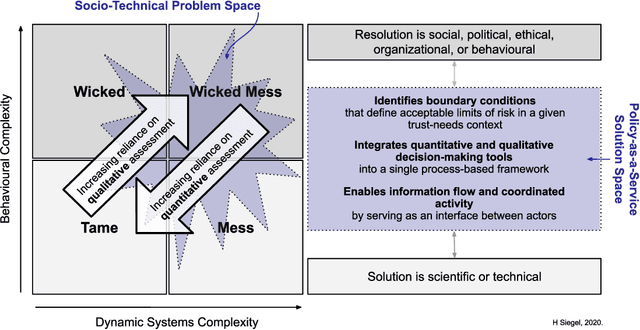
Building trustworthy autonomous systems is challenging for many reasons beyond simply trying to engineer agents that 'always do the right thing.' There is a broader context that is often not considered within AI and HRI: that the problem of trustworthiness is inherently socio-technical and ultimately involves a broad set of complex human factors and multidimensional relationships that can arise between agents, humans, organizations, and even governments and legal institutions, each with their own understanding and definitions of trust. This complexity presents a significant barrier to the development of trustworthy AI and HRI systems---while systems developers may desire to have their systems 'always do the right thing,' they generally lack the practical tools and expertise in law, regulation, policy and ethics to ensure this outcome. In this paper, we emphasize the "fuzzy" socio-technical aspects of trustworthiness and the need for their careful consideration during both design and deployment. We hope to contribute to the discussion of trustworthy engineering in AI and HRI by i) describing the policy landscape that must be considered when addressing trustworthy computing and the need for usable trust models, ii) highlighting an opportunity for trustworthy-by-design intervention within the systems engineering process, and iii) introducing the concept of a "policy-as-a-service" (PaaS) framework that can be readily applied by AI systems engineers to address the fuzzy problem of trust during the development and (eventually) runtime process. We envision that the PaaS approach, which offloads the development of policy design parameters and maintenance of policy standards to policy experts, will enable runtime trust capabilities intelligent systems in the wild.
Self-Supervised Scale Recovery for Monocular Depth and Egomotion Estimation
Sep 09, 2020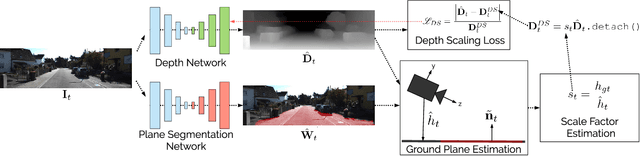

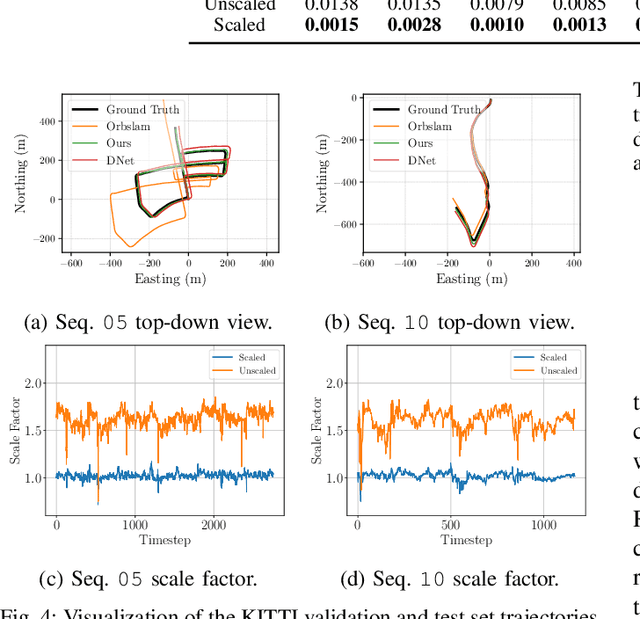
The self-supervised loss formulation for jointly training depth and egomotion neural networks with monocular images is well studied and has demonstrated state-of-the-art accuracy. One of the main limitations of this approach, however, is that the depth and egomotion estimates are only determined up to an unknown scale. In this paper, we present a novel scale recovery loss that enforces consistency between a known camera height and the estimated camera height, generating metric (scaled) depth and egomotion predictions. We show that our proposed method is competitive with other scale recovery techniques (i.e., pose supervision and stereo left/right consistency constraints). Further, we demonstrate how our method facilitates network retraining within new environments, whereas other scale-resolving approaches are incapable of doing so. Notably, our egomotion network is able to produce more accurate estimates than a similar method that only recovers scale at test time.
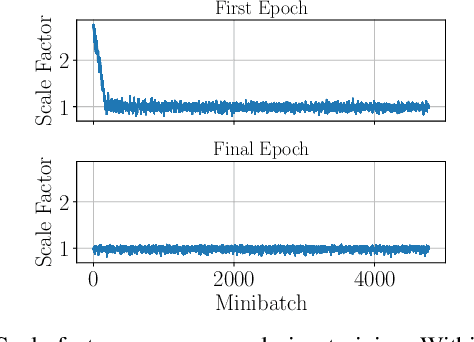
Heteroscedastic Uncertainty for Robust Generative Latent Dynamics
Aug 18, 2020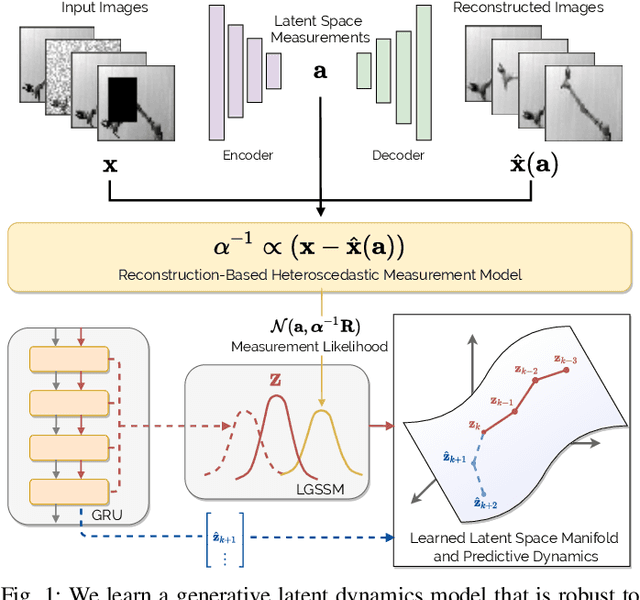

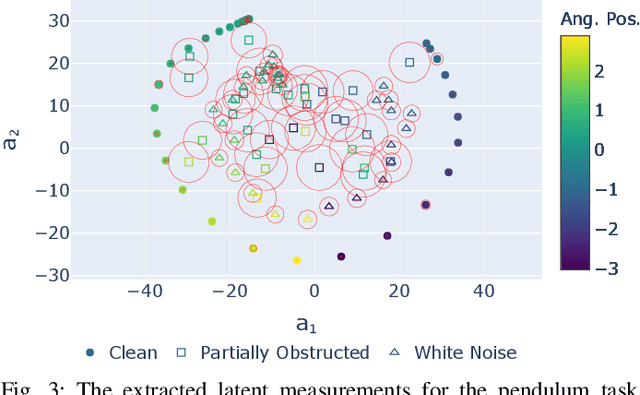

Learning or identifying dynamics from a sequence of high-dimensional observations is a difficult challenge in many domains, including reinforcement learning and control. The problem has recently been studied from a generative perspective through latent dynamics: high-dimensional observations are embedded into a lower-dimensional space in which the dynamics can be learned. Despite some successes, latent dynamics models have not yet been applied to real-world robotic systems where learned representations must be robust to a variety of perceptual confounds and noise sources not seen during training. In this paper, we present a method to jointly learn a latent state representation and the associated dynamics that is amenable for long-term planning and closed-loop control under perceptually difficult conditions. As our main contribution, we describe how our representation is able to capture a notion of heteroscedastic or input-specific uncertainty at test time by detecting novel or out-of-distribution (OOD) inputs. We present results from prediction and control experiments on two image-based tasks: a simulated pendulum balancing task and a real-world robotic manipulator reaching task. We demonstrate that our model produces significantly more accurate predictions and exhibits improved control performance, compared to a model that assumes homoscedastic uncertainty only, in the presence of varying degrees of input degradation.
Fighting Failures with FIRE: Failure Identification to Reduce Expert Burden in Intervention-Based Learning
Jul 01, 2020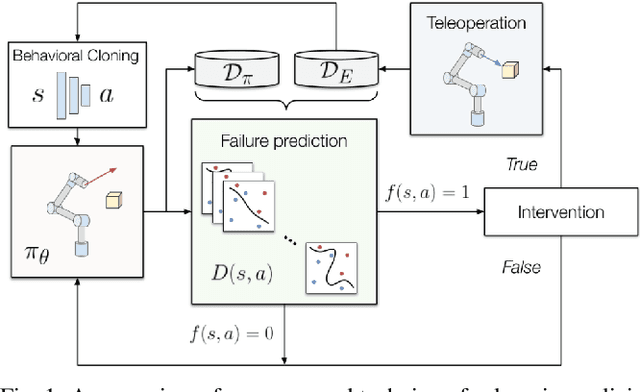
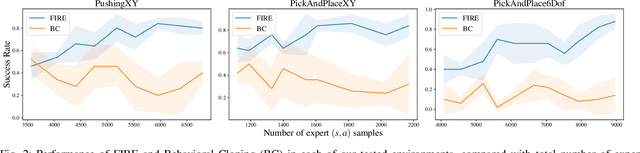
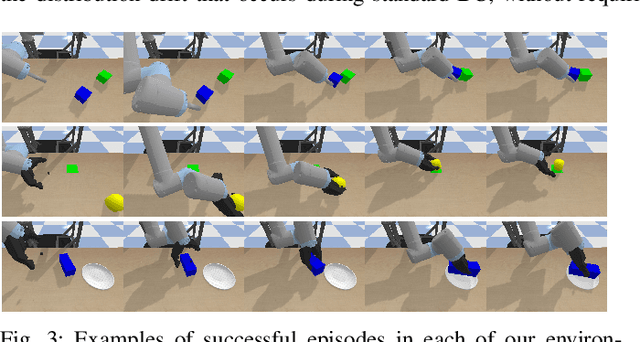
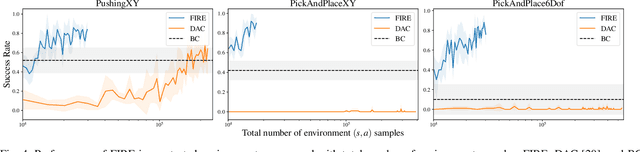
Supervised imitation learning, also known as behavior cloning, suffers from distribution drift leading to failures during policy execution. One approach to mitigating this issue is to allow an expert to correct the agent's actions during task execution, based on the expert's determination that the agent has reached a `point of no return'. The agent's policy is then retraining using these new corrective data. This approach alone can allow high-performance agents to be learned, but at a high cost: the expert must vigilantly observe execution until the policy reaches a specified level of success, and even at that point, there is no guarantee that the policy will always succeed. To address these limitations, we present FIRE (Failure Identification to Reduce Expert burden), a system that can predict when a running policy will fail, halt its execution, and request a correction from the expert. Unlike existing approaches that learn only from expert data, our approach learns from both expert and non-expert data, akin to adversarial learning. We demonstrate experimentally for a series of challenging manipulation tasks that our method is able to recognize state-action pairs that lead to failures. This allows seamless integration into an intervention-based learning system, where we show an order-of-magnitude gain in sample efficiency compared with a state-of-the-art inverse reinforcement learning methods and drastically improved performance over an equivalent amount of data learned with behavior cloning.
A Smooth Representation of Belief over SO for Deep Rotation Learning with Uncertainty
Jun 17, 2020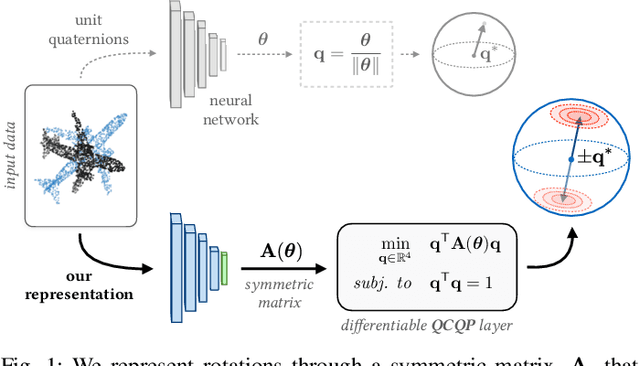
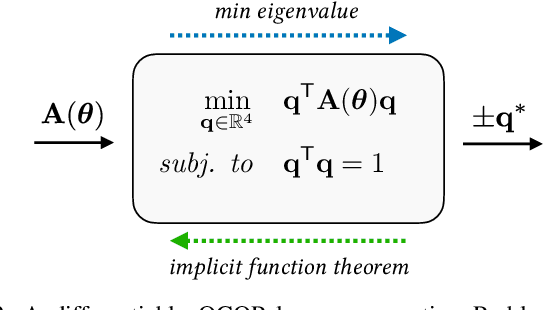
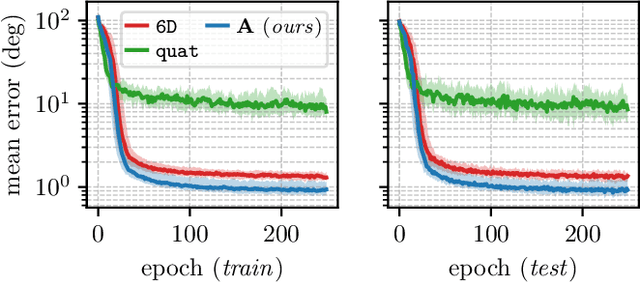
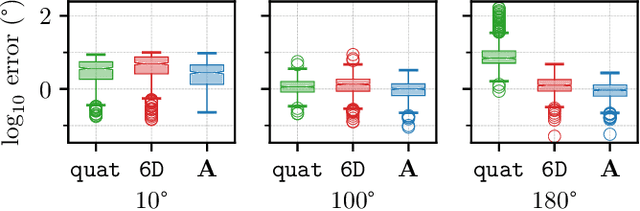
Accurate rotation estimation is at the heart of robot perception tasks such as visual odometry and object pose estimation. Deep neural networks have provided a new way to perform these tasks, and the choice of rotation representation is an important part of network design. In this work, we present a novel symmetric matrix representation of the 3D rotation group, SO(3), with two important properties that make it particularly suitable for learned models: (1) it satisfies a smoothness property that improves convergence and generalization when regressing large rotation targets, and (2) it encodes a symmetric Bingham belief over the space of unit quaternions, permitting the training of uncertainty-aware models. We empirically validate the benefits of our formulation by training deep neural rotation regressors on two data modalities. First, we use synthetic point-cloud data to show that our representation leads to superior predictive accuracy over existing representations for arbitrary rotation targets. Second, we use image data collected onboard ground and aerial vehicles to demonstrate that our representation is amenable to an effective out-of-distribution (OOD) rejection technique that significantly improves the robustness of rotation estimates to unseen environmental effects and corrupted input images, without requiring the use of an explicit likelihood loss, stochastic sampling, or an auxiliary classifier. This capability is key for safety-critical applications where detecting novel inputs can prevent catastrophic failure of learned models.
Certifiably Optimal Monocular Hand-Eye Calibration
May 19, 2020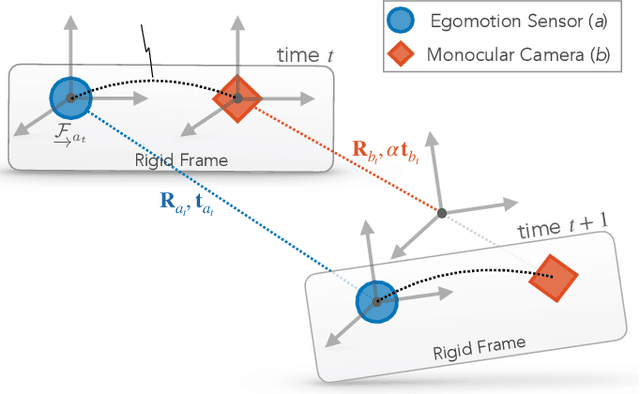
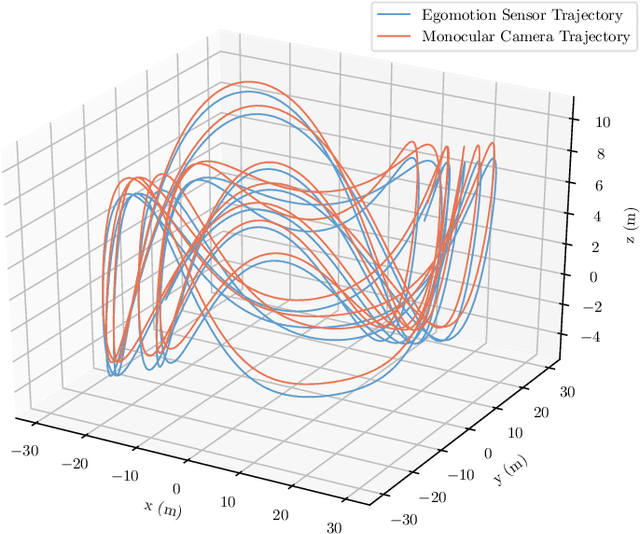
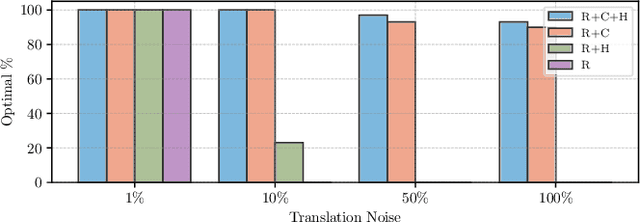
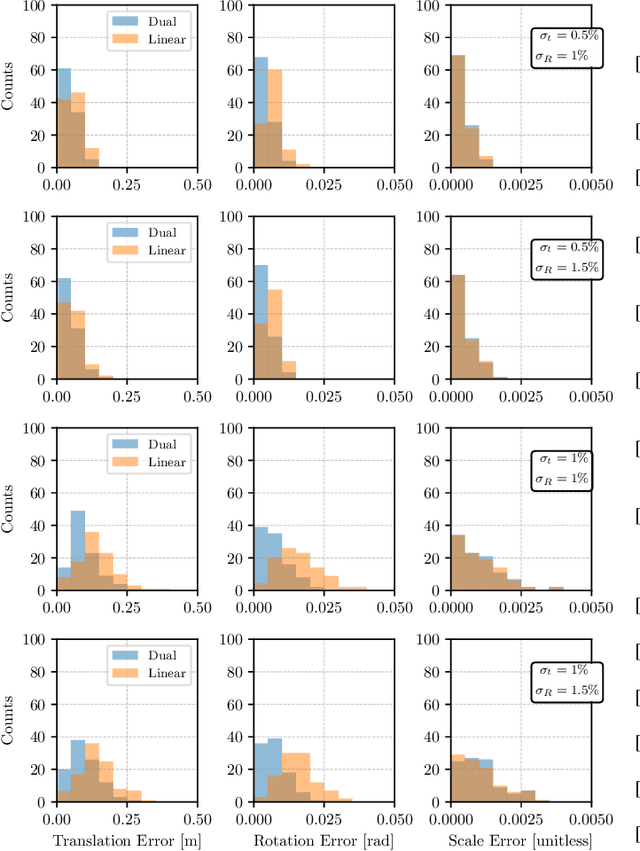
Correct fusion of data from two sensors is not possible without an accurate estimate of their relative pose, which can be determined through the process of extrinsic calibration. When two or more sensors are capable of producing their own egomotion estimates (i.e., measurements of their trajectories through an environment), the 'hand-eye' formulation of extrinsic calibration can be employed. In this paper, we extend our recent work on a convex optimization approach for hand-eye calibration to the case where one of the sensors cannot observe the scale of its translational motion (e.g., a monocular camera observing an unmapped environment). We prove that our technique is able to provide a certifiably globally optimal solution to both the known- and unknown-scale variants of hand-eye calibration, provided that the measurement noise is bounded. Herein, we focus on the theoretical aspects of the problem, show the tightness and stability of our solution, and demonstrate the optimality and speed of our algorithm through experiments with synthetic data.
Adversarial Genetic Programming for Cyber Security: A Rising Application Domain Where GP Matters
Apr 07, 2020
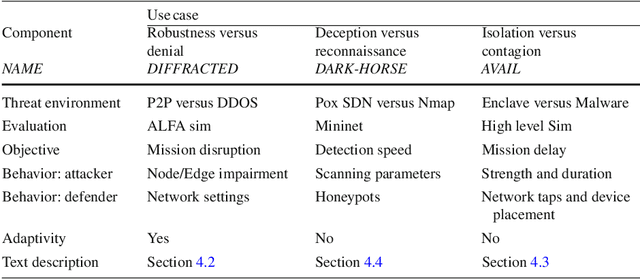
Cyber security adversaries and engagements are ubiquitous and ceaseless. We delineate Adversarial Genetic Programming for Cyber Security, a research topic that, by means of genetic programming (GP), replicates and studies the behavior of cyber adversaries and the dynamics of their engagements. Adversarial Genetic Programming for Cyber Security encompasses extant and immediate research efforts in a vital problem domain, arguably occupying a position at the frontier where GP matters. Additionally, it prompts research questions around evolving complex behavior by expressing different abstractions with GP and opportunities to reconnect to the Machine Learning, Artificial Life, Agent-Based Modeling and Cyber Security communities. We present a framework called RIVALS which supports the study of network security arms races. Its goal is to elucidate the dynamics of cyber networks under attack by computationally modeling and simulating them.