 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Continuous Force-Torque Sensor Bias Estimation
Mar 02, 2024Six axis force-torque sensors are commonly attached to the wrist of serial robots to measure the external forces and torques acting on the robot's end-effector. These measurements are used for load identification, contact detection, and human-robot interaction amongst other applications. Typically, the measurements obtained from the force-torque sensor are more accurate than estimates computed from joint torque readings, as the former is independent of the robot's dynamic and kinematic models. However, the force-torque sensor measurements are affected by a bias that drifts over time, caused by the compounding effects of temperature changes, mechanical stresses, and other factors. In this work, we present a pipeline that continuously estimates the bias and the drift of the bias of a force-torque sensor attached to the wrist of a robot. The first component of the pipeline is a Kalman filter that estimates the kinematic state (position, velocity, and acceleration) of the robot's joints. The second component is a kinematic model that maps the joint-space kinematics to the task-space kinematics of the force-torque sensor. Finally, the third component is a Kalman filter that estimates the bias and the drift of the bias of the force-torque sensor assuming that the inertial parameters of the gripper attached to the distal end of the force-torque sensor are known with certainty.
Extrinsic Calibration of 2D mm-Wavelength Radar Pairs Using Ego-Velocity Estimates
Feb 01, 2023Correct radar data fusion depends on knowledge of the spatial transform between sensor pairs. Current methods for determining this transform operate by aligning identifiable features in different radar scans, or by relying on measurements from another, more accurate sensor (e.g., a lidar unit). Feature-based alignment requires the sensors to have overlapping fields of view or necessitates the construction of an environment map. Several existing methods require bespoke retroreflective radar targets. These requirements limit both where and how calibration can be performed. In this paper, we take a different approach: instead of attempting to track targets or features, which can be difficult in noisy radar data, we instead rely on ego-velocity estimates from each radar to perform calibration. Our method enables calibration of a subset of the transform parameters, including the yaw and axis of translation between the radar pair, without the need for a shared field of view or for specialized structures in the environment. In general, the yaw and axis of translation are the most important parameters for data fusion, the most likely to vary over time, and the most difficult to calibrate manually. We formulate calibration as a batch optimization problem, prove that the radar-radar system is identifiable, and specify the platform excitation requirements. Through simulations studies and real-world experiments, we establish that our method is more reliable and accurate at estimating the yaw and translation axis than state-of-the-art methods. Finally, we show that the full rigid-body transform can be recovered if relatively coarse information about the rotation rate is available.
Spatiotemporal Calibration of 3D mm-Wavelength Radar-Camera Pairs
Nov 03, 2022



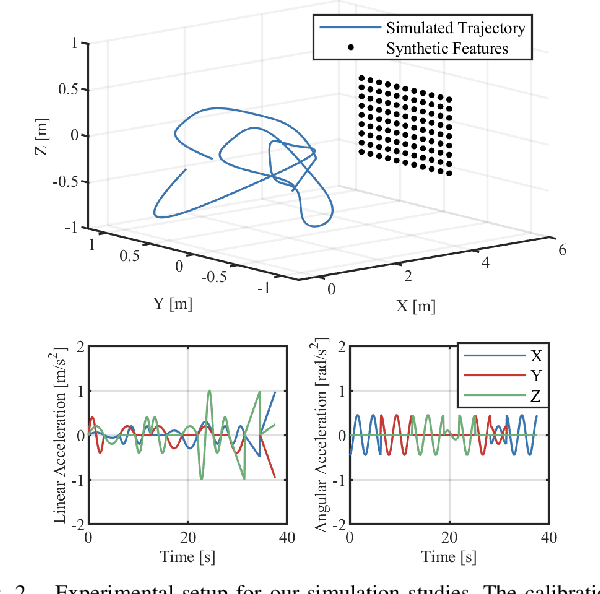
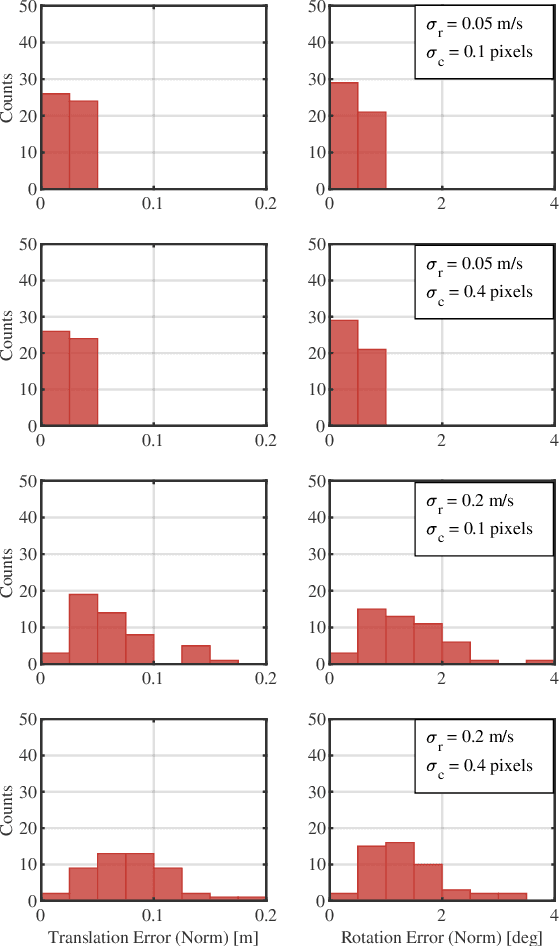
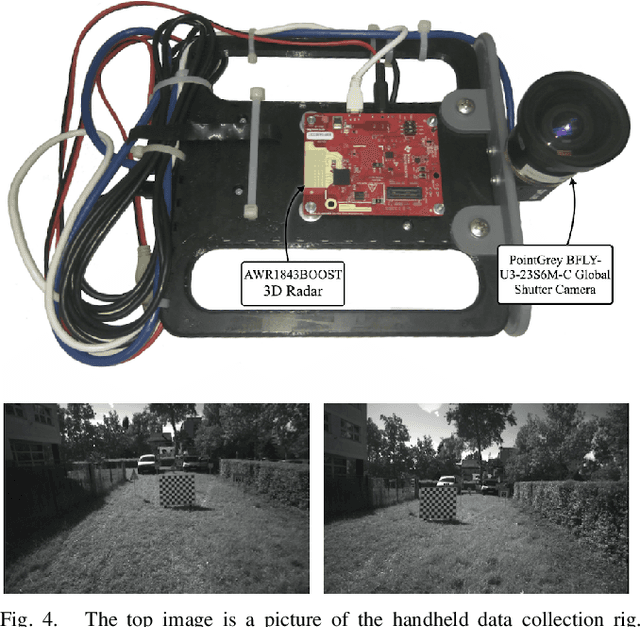
Autonomous vehicles (AVs) often depend on multiple sensors and sensing modalities to mitigate data degradation and provide a measure of robustness when operating in adverse conditions. Radars and cameras are a popular sensor combination - although radar measurements are sparse in comparison to camera images, radar scans are able to penetrate fog, rain, and snow. Data from both sensors are typically fused in a common reference frame prior to use in downstream perception tasks. However, accurate sensor fusion depends upon knowledge of the spatial transform between the sensors and any temporal misalignment that exists in their measurement times. During the life cycle of an AV, these calibration parameters may change. The ability to perform in-situ spatiotemporal calibration is essential to ensure reliable long-term operation. State-of-the-art 3D radar-camera spatiotemporal calibration algorithms require bespoke calibration targets, which are not readily available in the field. In this paper, we describe an algorithm for targetless spatiotemporal calibration that is able to operate without specialized infrastructure. Our approach leverages the ability of the radar unit to measure its own ego-velocity relative to a fixed external reference frame. We analyze the identifiability of the spatiotemporal calibration problem and determine the motions necessary for calibration. Through a series of simulation studies, we characterize the sensitivity of our algorithm to measurement noise. Finally, we demonstrate accurate calibration for three real-world systems, including a handheld sensor rig and a vehicle-mounted sensor array. Our results show that we are able to match the performance of an existing, target-based method, while calibrating in arbitrary (infrastructure-free) environments.
A Self-Supervised, Differentiable Kalman Filter for Uncertainty-Aware Visual-Inertial Odometry
Mar 14, 2022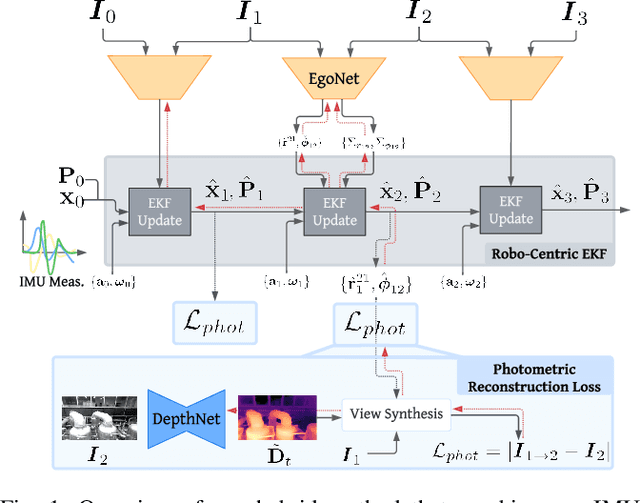
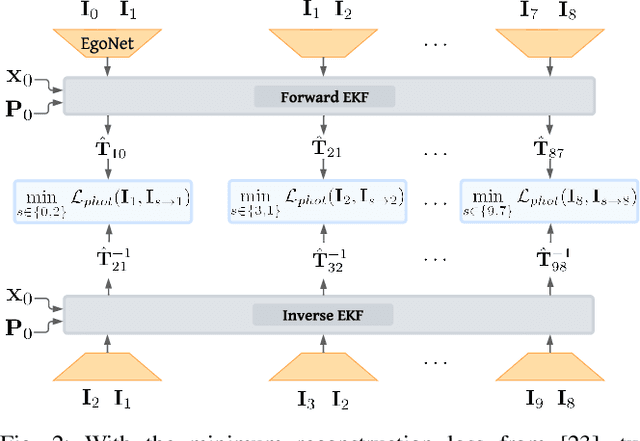
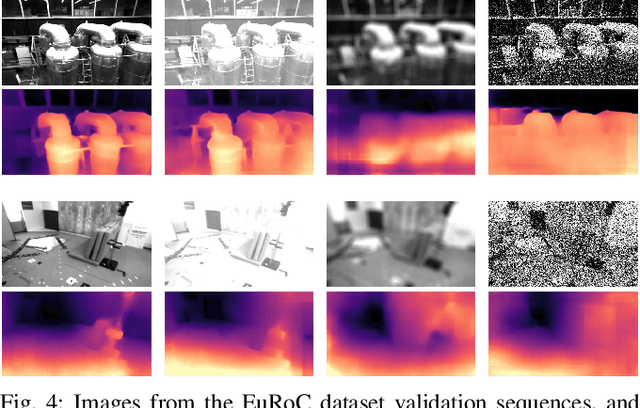
Traditionally, visual-inertial-odometry (VIO) systems rely on filtering or optimization-based frameworks for robot egomotion estimation. While these methods are accurate under nominal conditions, they are prone to failure in degraded environments, where illumination changes, fast camera motion, or textureless scenes are present. Learning-based systems have the potential to outperform classical implementations in degraded environments, but are, currently, less accurate than classical methods in nominal settings. A third class, of hybrid systems, attempts to leverage the advantages of both systems. Herein, we introduce a framework for training a hybrid VIO system. Our approach uses a differentiable Kalman filter with an IMU-based process model and a robust, neural network-based relative pose measurement model. By utilizing the data efficiency of self-supervised learning, we show that our system significantly outperforms a similar, supervised system, while enabling online retraining. To demonstrate the utility of our approach, we evaluate our system on a visually degraded version of the EuRoC dataset. Notably, we find that, in cases where classical estimators consistently diverge, our estimator does not diverge or suffer from a significant reduction in accuracy. Finally, our system, by properly utilizing the metric information contained in the IMU measurements, is able to recover metric scale, while other self-supervised monocular VIO approaches cannot.
Observability-Aware Trajectory Optimization: Theory, Viability, and State of the Art
Sep 18, 2021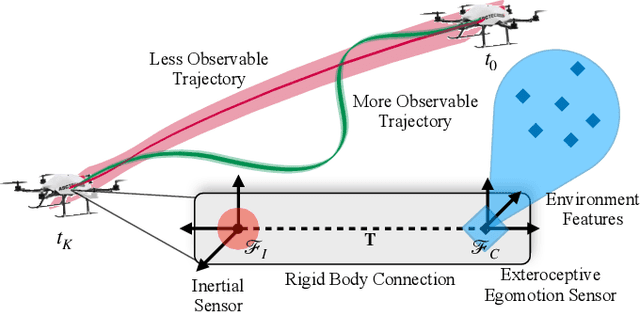

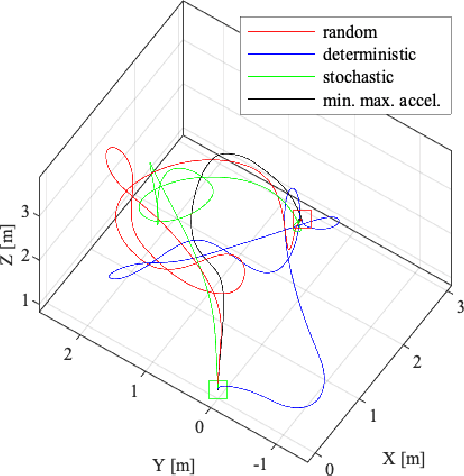
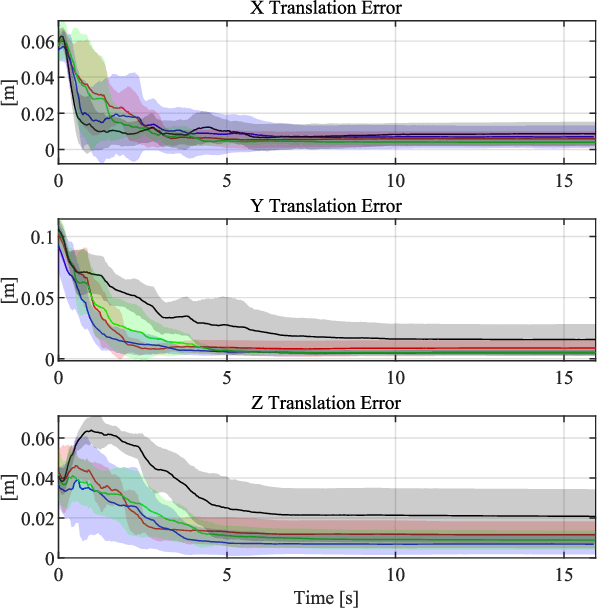
Ideally, robots should move in ways that maximize the knowledge gained about the state of both their internal system and the external operating environment. Trajectory design is a challenging problem that has been investigated from a variety of perspectives, ranging from information-theoretic analyses to leaning-based approaches. Recently, observability-based metrics have been proposed to find trajectories that enable rapid and accurate state and parameter estimation. The viability and efficacy of these methods is not yet well understood in the literature. In this paper, we compare two state-of-the-art methods for observability-aware trajectory optimization and seek to add important theoretical clarifications and valuable discussion about their overall effectiveness. For evaluation, we examine the representative task of sensor-to-sensor extrinsic self-calibration using a realistic physics simulator. We also study the sensitivity of these algorithms to changes in the information content of the exteroceptive sensor measurements.
A Continuous-Time Approach for 3D Radar-to-Camera Extrinsic Calibration
Mar 12, 2021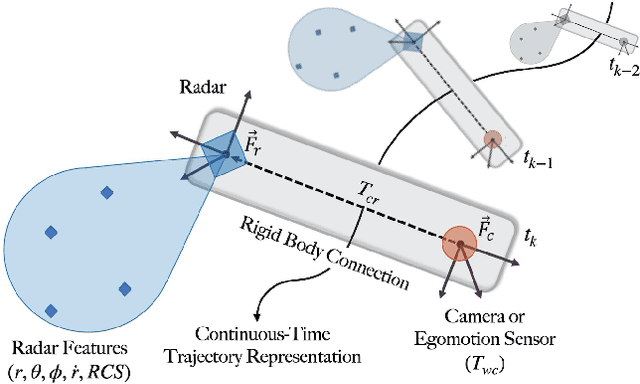
Reliable operation in inclement weather is essential to the deployment of safe autonomous vehicles (AVs). Robustness and reliability can be achieved by fusing data from the standard AV sensor suite (i.e., lidars, cameras) with weather robust sensors, such as millimetre-wavelength radar. Critically, accurate sensor data fusion requires knowledge of the rigid-body transform between sensor pairs, which can be determined through the process of extrinsic calibration. A number of extrinsic calibration algorithms have been designed for 2D (planar) radar sensors - however, recently-developed, low-cost 3D millimetre-wavelength radars are set to displace their 2D counterparts in many applications. In this paper, we present a continuous-time 3D radar-to-camera extrinsic calibration algorithm that utilizes radar velocity measurements and, unlike the majority of existing techniques, does not require specialized radar retroreflectors to be present in the environment. We derive the observability properties of our formulation and demonstrate the efficacy of our algorithm through synthetic and real-world experiments.
Certifiably Optimal Monocular Hand-Eye Calibration
May 19, 2020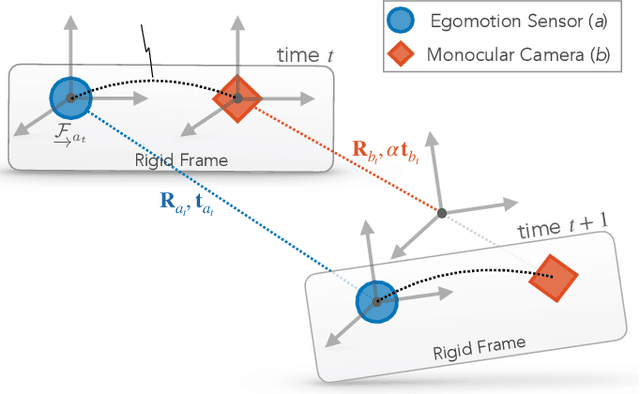
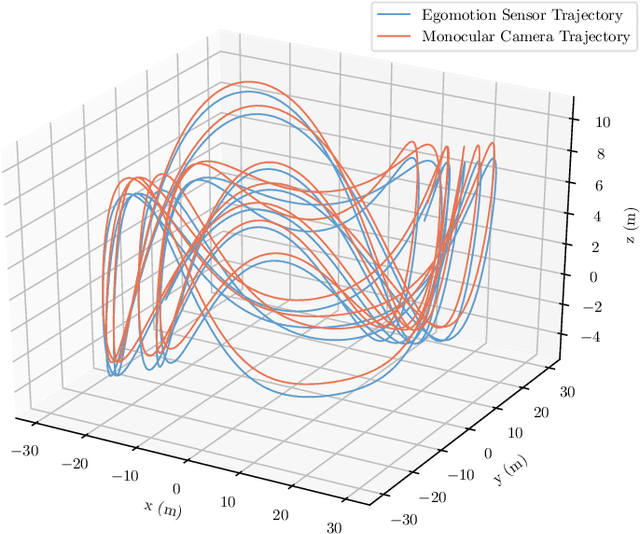
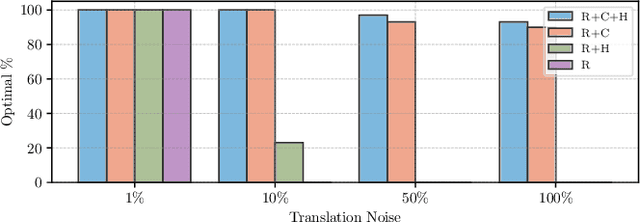
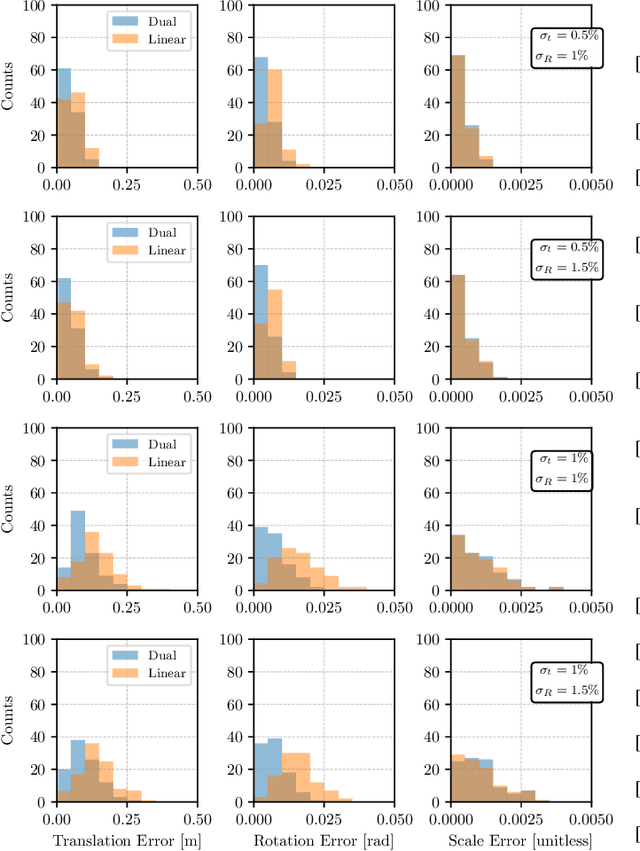
Correct fusion of data from two sensors is not possible without an accurate estimate of their relative pose, which can be determined through the process of extrinsic calibration. When two or more sensors are capable of producing their own egomotion estimates (i.e., measurements of their trajectories through an environment), the 'hand-eye' formulation of extrinsic calibration can be employed. In this paper, we extend our recent work on a convex optimization approach for hand-eye calibration to the case where one of the sensors cannot observe the scale of its translational motion (e.g., a monocular camera observing an unmapped environment). We prove that our technique is able to provide a certifiably globally optimal solution to both the known- and unknown-scale variants of hand-eye calibration, provided that the measurement noise is bounded. Herein, we focus on the theoretical aspects of the problem, show the tightness and stability of our solution, and demonstrate the optimality and speed of our algorithm through experiments with synthetic data.