 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtrinsic Calibration of 2D mm-Wavelength Radar Pairs Using Ego-Velocity Estimates
Feb 01, 2023Correct radar data fusion depends on knowledge of the spatial transform between sensor pairs. Current methods for determining this transform operate by aligning identifiable features in different radar scans, or by relying on measurements from another, more accurate sensor (e.g., a lidar unit). Feature-based alignment requires the sensors to have overlapping fields of view or necessitates the construction of an environment map. Several existing methods require bespoke retroreflective radar targets. These requirements limit both where and how calibration can be performed. In this paper, we take a different approach: instead of attempting to track targets or features, which can be difficult in noisy radar data, we instead rely on ego-velocity estimates from each radar to perform calibration. Our method enables calibration of a subset of the transform parameters, including the yaw and axis of translation between the radar pair, without the need for a shared field of view or for specialized structures in the environment. In general, the yaw and axis of translation are the most important parameters for data fusion, the most likely to vary over time, and the most difficult to calibrate manually. We formulate calibration as a batch optimization problem, prove that the radar-radar system is identifiable, and specify the platform excitation requirements. Through simulations studies and real-world experiments, we establish that our method is more reliable and accurate at estimating the yaw and translation axis than state-of-the-art methods. Finally, we show that the full rigid-body transform can be recovered if relatively coarse information about the rotation rate is available.
Contrastive Learning for Self-Supervised Pre-Training of Point Cloud Segmentation Networks With Image Data
Jan 18, 2023



Reducing the quantity of annotations required for supervised training is vital when labels are scarce and costly. This reduction is particularly important for semantic segmentation tasks involving 3D datasets, which are often significantly smaller and more challenging to annotate than their image-based counterparts. Self-supervised pre-training on unlabelled data is one way to reduce the amount of manual annotations needed. Previous work has focused on pre-training with point clouds exclusively. While useful, this approach often requires two or more registered views. In the present work, we combine image and point cloud modalities by first learning self-supervised image features and then using these features to train a 3D model. By incorporating image data, which is often included in many 3D datasets, our pre-training method only requires a single scan of a scene and can be applied to cases where localization information is unavailable. We demonstrate that our pre-training approach, despite using single scans, achieves comparable performance to other multi-scan, point cloud-only methods.
Learning from Guided Play: Improving Exploration for Adversarial Imitation Learning with Simple Auxiliary Tasks
Dec 30, 2022



Adversarial imitation learning (AIL) has become a popular alternative to supervised imitation learning that reduces the distribution shift suffered by the latter. However, AIL requires effective exploration during an online reinforcement learning phase. In this work, we show that the standard, naive approach to exploration can manifest as a suboptimal local maximum if a policy learned with AIL sufficiently matches the expert distribution without fully learning the desired task. This can be particularly catastrophic for manipulation tasks, where the difference between an expert and a non-expert state-action pair is often subtle. We present Learning from Guided Play (LfGP), a framework in which we leverage expert demonstrations of multiple exploratory, auxiliary tasks in addition to a main task. The addition of these auxiliary tasks forces the agent to explore states and actions that standard AIL may learn to ignore. Additionally, this particular formulation allows for the reusability of expert data between main tasks. Our experimental results in a challenging multitask robotic manipulation domain indicate that LfGP significantly outperforms both AIL and behaviour cloning, while also being more expert sample efficient than these baselines. To explain this performance gap, we provide further analysis of a toy problem that highlights the coupling between a local maximum and poor exploration, and also visualize the differences between the learned models from AIL and LfGP.
Self-Supervised Pre-training of 3D Point Cloud Networks with Image Data
Dec 13, 2022


Reducing the quantity of annotations required for supervised training is vital when labels are scarce and costly. This reduction is especially important for semantic segmentation tasks involving 3D datasets that are often significantly smaller and more challenging to annotate than their image-based counterparts. Self-supervised pre-training on large unlabelled datasets is one way to reduce the amount of manual annotations needed. Previous work has focused on pre-training with point cloud data exclusively; this approach often requires two or more registered views. In the present work, we combine image and point cloud modalities, by first learning self-supervised image features and then using these features to train a 3D model. By incorporating image data, which is often included in many 3D datasets, our pre-training method only requires a single scan of a scene. We demonstrate that our pre-training approach, despite using single scans, achieves comparable performance to other multi-scan, point cloud-only methods.
SPIn-NeRF: Multiview Segmentation and Perceptual Inpainting with Neural Radiance Fields
Nov 22, 2022Neural Radiance Fields (NeRFs) have emerged as a popular approach for novel view synthesis. While NeRFs are quickly being adapted for a wider set of applications, intuitively editing NeRF scenes is still an open challenge. One important editing task is the removal of unwanted objects from a 3D scene, such that the replaced region is visually plausible and consistent with its context. We refer to this task as 3D inpainting. In 3D, solutions must be both consistent across multiple views and geometrically valid. In this paper, we propose a novel 3D inpainting method that addresses these challenges. Given a small set of posed images and sparse annotations in a single input image, our framework first rapidly obtains a 3D segmentation mask for a target object. Using the mask, a perceptual optimizationbased approach is then introduced that leverages learned 2D image inpainters, distilling their information into 3D space, while ensuring view consistency. We also address the lack of a diverse benchmark for evaluating 3D scene inpainting methods by introducing a dataset comprised of challenging real-world scenes. In particular, our dataset contains views of the same scene with and without a target object, enabling more principled benchmarking of the 3D inpainting task. We first demonstrate the superiority of our approach on multiview segmentation, comparing to NeRFbased methods and 2D segmentation approaches. We then evaluate on the task of 3D inpainting, establishing state-ofthe-art performance against other NeRF manipulation algorithms, as well as a strong 2D image inpainter baseline
Spatiotemporal Calibration of 3D mm-Wavelength Radar-Camera Pairs
Nov 03, 2022



Autonomous vehicles (AVs) often depend on multiple sensors and sensing modalities to mitigate data degradation and provide a measure of robustness when operating in adverse conditions. Radars and cameras are a popular sensor combination - although radar measurements are sparse in comparison to camera images, radar scans are able to penetrate fog, rain, and snow. Data from both sensors are typically fused in a common reference frame prior to use in downstream perception tasks. However, accurate sensor fusion depends upon knowledge of the spatial transform between the sensors and any temporal misalignment that exists in their measurement times. During the life cycle of an AV, these calibration parameters may change. The ability to perform in-situ spatiotemporal calibration is essential to ensure reliable long-term operation. State-of-the-art 3D radar-camera spatiotemporal calibration algorithms require bespoke calibration targets, which are not readily available in the field. In this paper, we describe an algorithm for targetless spatiotemporal calibration that is able to operate without specialized infrastructure. Our approach leverages the ability of the radar unit to measure its own ego-velocity relative to a fixed external reference frame. We analyze the identifiability of the spatiotemporal calibration problem and determine the motions necessary for calibration. Through a series of simulation studies, we characterize the sensitivity of our algorithm to measurement noise. Finally, we demonstrate accurate calibration for three real-world systems, including a handheld sensor rig and a vehicle-mounted sensor array. Our results show that we are able to match the performance of an existing, target-based method, while calibrating in arbitrary (infrastructure-free) environments.
One Network, Many Robots: Generative Graphical Inverse Kinematics
Sep 22, 2022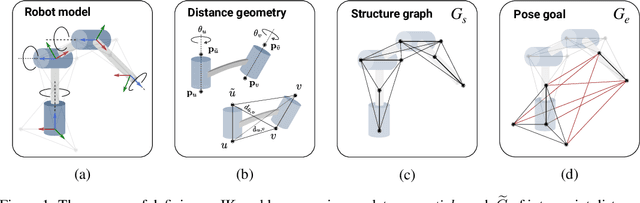
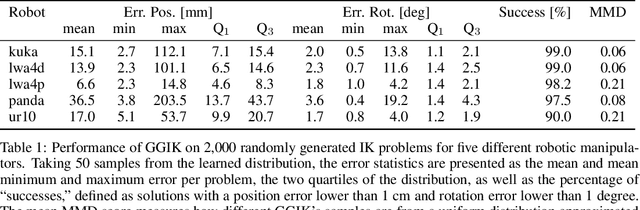
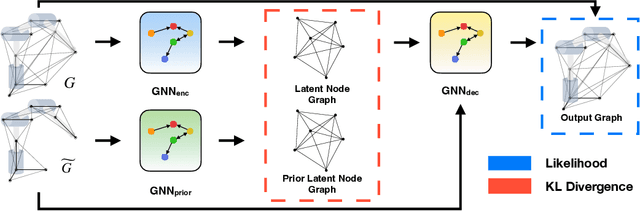

Quickly and reliably finding accurate inverse kinematics (IK) solutions remains a challenging problem for robotic manipulation. Existing numerical solvers are broadly applicable, but rely on local search techniques to manage highly nonconvex objective functions. Recently, learning-based approaches have shown promise as a means to generate fast and accurate IK results; learned solvers can easily be integrated with other learning algorithms in end-to-end systems. However, learning-based methods have an Achilles' heel: each robot of interest requires a specialized model which must be trained from scratch. To address this key shortcoming, we investigate a novel distance-geometric robot representation coupled with a graph structure that allows us to leverage the flexibility of graph neural networks (GNNs). We use this approach to train the first learned generative graphical inverse kinematics (GGIK) solver that is, crucially, "robot-agnostic"-a single model is able to provide IK solutions for a variety of different robots. Additionally, the generative nature of GGIK allows the solver to produce a large number of diverse solutions in parallel with minimal additional computation time, making it appropriate for applications such as sampling-based motion planning. Finally, GGIK can complement local IK solvers by providing reliable initializations. These advantages, as well as the ability to use task-relevant priors and to continuously improve with new data, suggest that GGIK has the potential to be a key component of flexible, learning-based robotic manipulation systems.
LaTeRF: Label and Text Driven Object Radiance Fields
Jul 18, 2022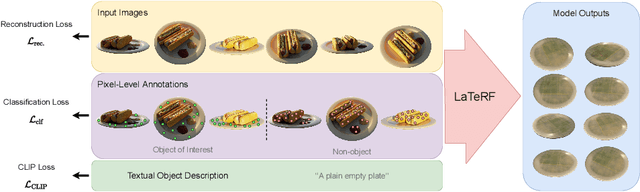
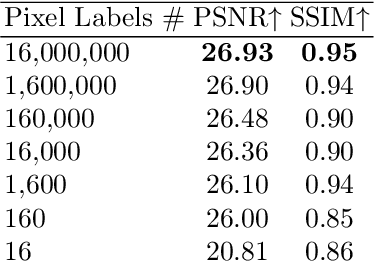
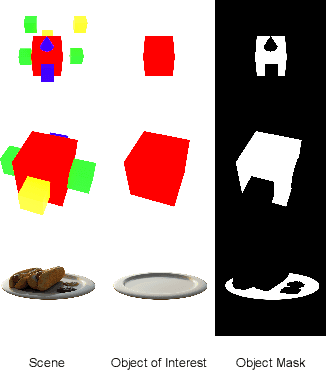
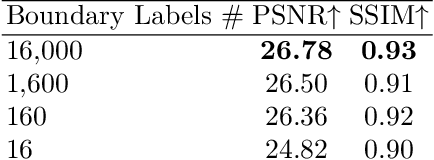
Obtaining 3D object representations is important for creating photo-realistic simulations and for collecting AR and VR assets. Neural fields have shown their effectiveness in learning a continuous volumetric representation of a scene from 2D images, but acquiring object representations from these models with weak supervision remains an open challenge. In this paper we introduce LaTeRF, a method for extracting an object of interest from a scene given 2D images of the entire scene, known camera poses, a natural language description of the object, and a set of point-labels of object and non-object points in the input images. To faithfully extract the object from the scene, LaTeRF extends the NeRF formulation with an additional `objectness' probability at each 3D point. Additionally, we leverage the rich latent space of a pre-trained CLIP model combined with our differentiable object renderer, to inpaint the occluded parts of the object. We demonstrate high-fidelity object extraction on both synthetic and real-world datasets and justify our design choices through an extensive ablation study.
Learning Sequential Latent Variable Models from Multimodal Time Series Data
Apr 21, 2022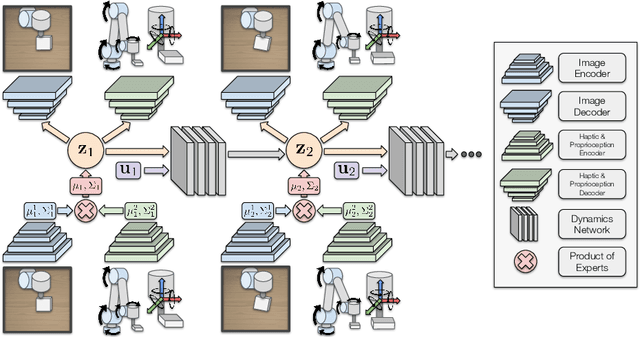
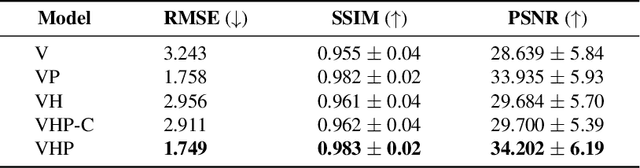
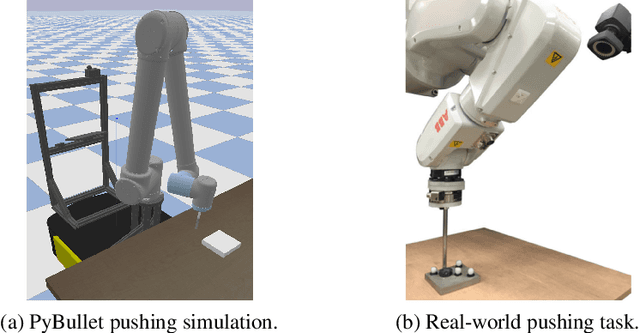
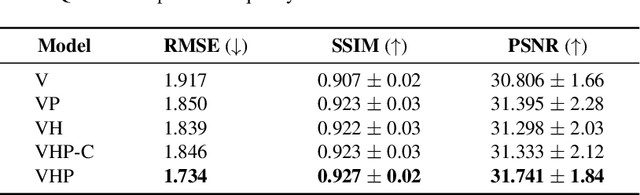
Sequential modelling of high-dimensional data is an important problem that appears in many domains including model-based reinforcement learning and dynamics identification for control. Latent variable models applied to sequential data (i.e., latent dynamics models) have been shown to be a particularly effective probabilistic approach to solve this problem, especially when dealing with images. However, in many application areas (e.g., robotics), information from multiple sensing modalities is available -- existing latent dynamics methods have not yet been extended to effectively make use of such multimodal sequential data. Multimodal sensor streams can be correlated in a useful manner and often contain complementary information across modalities. In this work, we present a self-supervised generative modelling framework to jointly learn a probabilistic latent state representation of multimodal data and the respective dynamics. Using synthetic and real-world datasets from a multimodal robotic planar pushing task, we demonstrate that our approach leads to significant improvements in prediction and representation quality. Furthermore, we compare to the common learning baseline of concatenating each modality in the latent space and show that our principled probabilistic formulation performs better. Finally, despite being fully self-supervised, we demonstrate that our method is nearly as effective as an existing supervised approach that relies on ground truth labels.
A Self-Supervised, Differentiable Kalman Filter for Uncertainty-Aware Visual-Inertial Odometry
Mar 14, 2022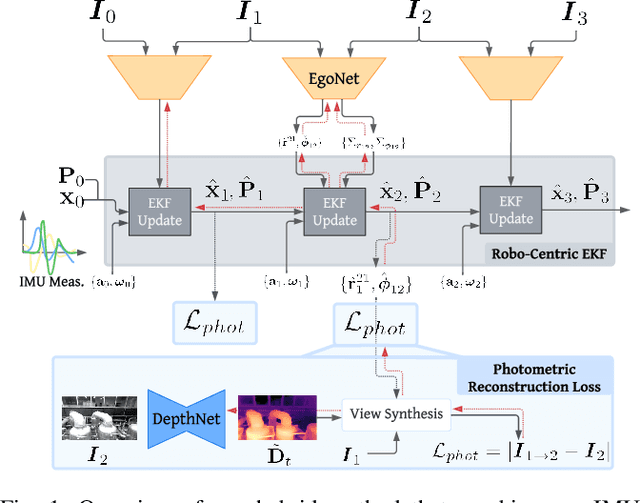
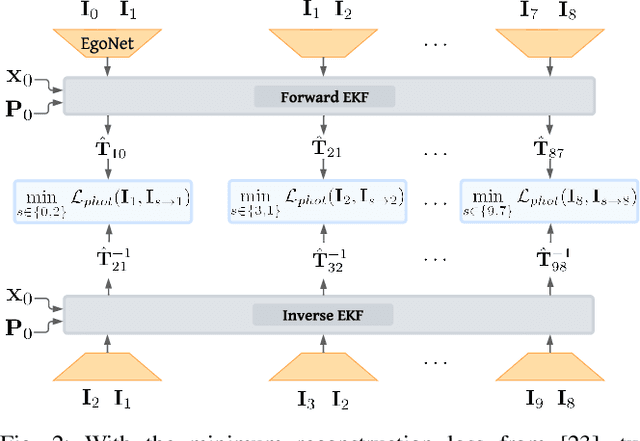
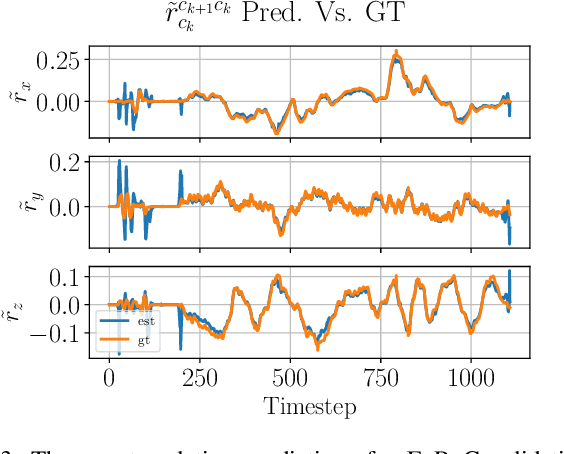
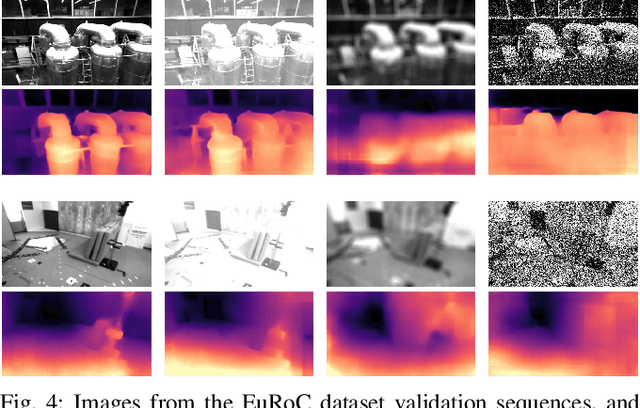
Traditionally, visual-inertial-odometry (VIO) systems rely on filtering or optimization-based frameworks for robot egomotion estimation. While these methods are accurate under nominal conditions, they are prone to failure in degraded environments, where illumination changes, fast camera motion, or textureless scenes are present. Learning-based systems have the potential to outperform classical implementations in degraded environments, but are, currently, less accurate than classical methods in nominal settings. A third class, of hybrid systems, attempts to leverage the advantages of both systems. Herein, we introduce a framework for training a hybrid VIO system. Our approach uses a differentiable Kalman filter with an IMU-based process model and a robust, neural network-based relative pose measurement model. By utilizing the data efficiency of self-supervised learning, we show that our system significantly outperforms a similar, supervised system, while enabling online retraining. To demonstrate the utility of our approach, we evaluate our system on a visually degraded version of the EuRoC dataset. Notably, we find that, in cases where classical estimators consistently diverge, our estimator does not diverge or suffer from a significant reduction in accuracy. Finally, our system, by properly utilizing the metric information contained in the IMU measurements, is able to recover metric scale, while other self-supervised monocular VIO approaches cannot.