 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenTinker: Separating Concerns in Agentic Reinforcement Learning
Jan 12, 2026We introduce OpenTinker, an infrastructure for reinforcement learning (RL) of large language model (LLM) agents built around a separation of concerns across algorithm design, execution, and agent-environment interaction. Rather than relying on monolithic, end-to-end RL pipelines, OpenTinker decomposes agentic learning systems into lightweight, composable components with clearly defined abstraction boundaries. Users specify agents, environments, and interaction protocols, while inference and training are delegated to a managed execution runtime. OpenTinker introduces a centralized scheduler for managing training and inference workloads, including LoRA-based and full-parameter RL, supervised fine-tuning, and inference, over shared resources. We further discuss design principles for extending OpenTinker to multi-agent training. Finally, we present a set of RL use cases that demonstrate the effectiveness of the framework in practical agentic learning scenarios.
Debugging Tabular Log as Dynamic Graphs
Dec 28, 2025Tabular log abstracts objects and events in the real-world system and reports their updates to reflect the change of the system, where one can detect real-world inconsistencies efficiently by debugging corresponding log entries. However, recent advances in processing text-enriched tabular log data overly depend on large language models (LLMs) and other heavy-load models, thus suffering from limited flexibility and scalability. This paper proposes a new framework, GraphLogDebugger, to debug tabular log based on dynamic graphs. By constructing heterogeneous nodes for objects and events and connecting node-wise edges, the framework recovers the system behind the tabular log as an evolving dynamic graph. With the help of our dynamic graph modeling, a simple dynamic Graph Neural Network (GNN) is representative enough to outperform LLMs in debugging tabular log, which is validated by experimental results on real-world log datasets of computer systems and academic papers.
Adaptation of Agentic AI
Dec 22, 2025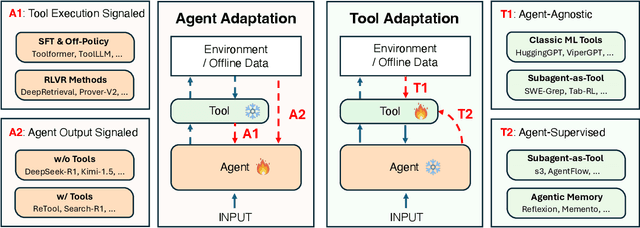
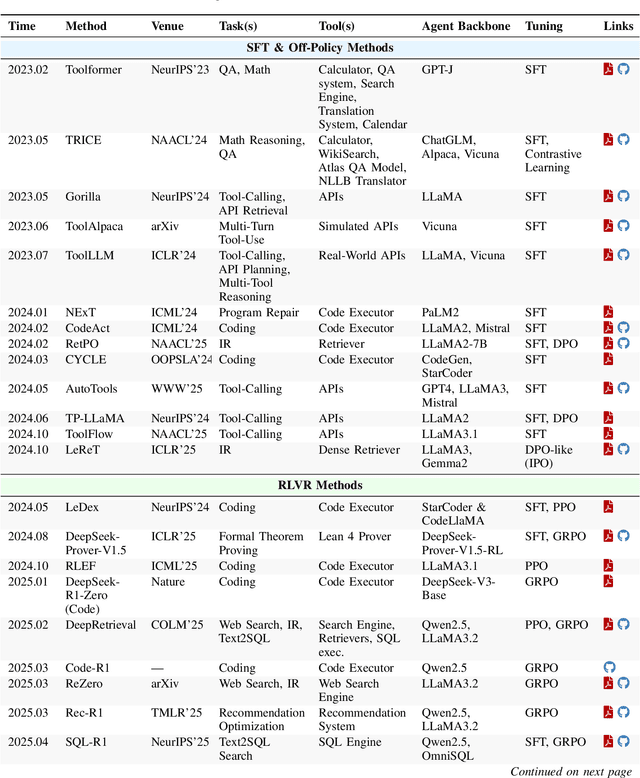
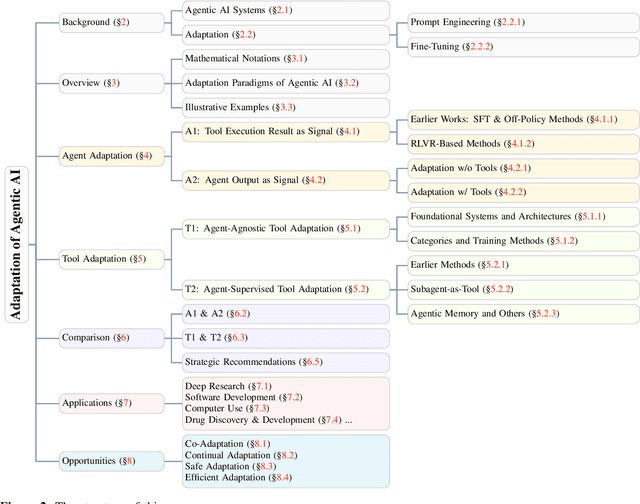
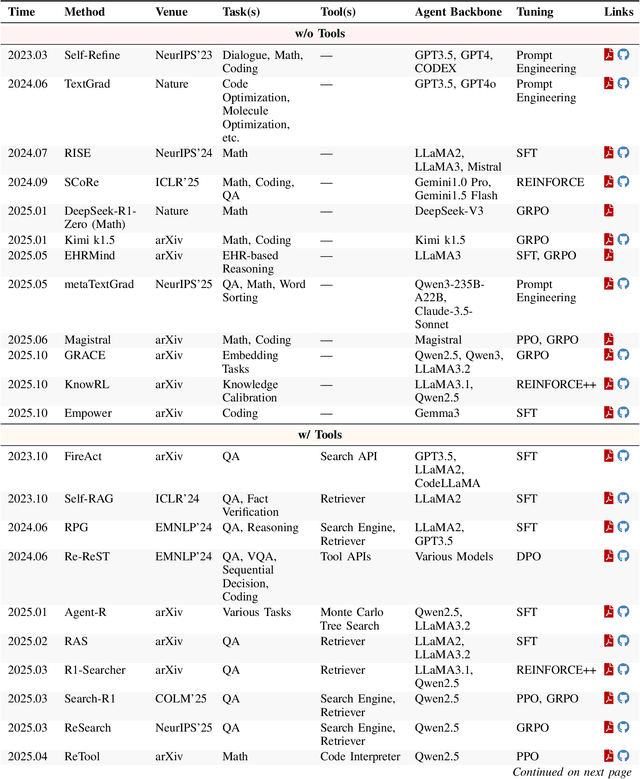
Cutting-edge agentic AI systems are built on foundation models that can be adapted to plan, reason, and interact with external tools to perform increasingly complex and specialized tasks. As these systems grow in capability and scope, adaptation becomes a central mechanism for improving performance, reliability, and generalization. In this paper, we unify the rapidly expanding research landscape into a systematic framework that spans both agent adaptations and tool adaptations. We further decompose these into tool-execution-signaled and agent-output-signaled forms of agent adaptation, as well as agent-agnostic and agent-supervised forms of tool adaptation. We demonstrate that this framework helps clarify the design space of adaptation strategies in agentic AI, makes their trade-offs explicit, and provides practical guidance for selecting or switching among strategies during system design. We then review the representative approaches in each category, analyze their strengths and limitations, and highlight key open challenges and future opportunities. Overall, this paper aims to offer a conceptual foundation and practical roadmap for researchers and practitioners seeking to build more capable, efficient, and reliable agentic AI systems.
LiveTradeBench: Seeking Real-World Alpha with Large Language Models
Nov 05, 2025Large language models (LLMs) achieve strong performance across benchmarks--from knowledge quizzes and math reasoning to web-agent tasks--but these tests occur in static settings, lacking real dynamics and uncertainty. Consequently, they evaluate isolated reasoning or problem-solving rather than decision-making under uncertainty. To address this, we introduce LiveTradeBench, a live trading environment for evaluating LLM agents in realistic and evolving markets. LiveTradeBench follows three design principles: (i) Live data streaming of market prices and news, eliminating dependence on offline backtesting and preventing information leakage while capturing real-time uncertainty; (ii) a portfolio-management abstraction that extends control from single-asset actions to multi-asset allocation, integrating risk management and cross-asset reasoning; and (iii) multi-market evaluation across structurally distinct environments--U.S. stocks and Polymarket prediction markets--differing in volatility, liquidity, and information flow. At each step, an agent observes prices, news, and its portfolio, then outputs percentage allocations that balance risk and return. Using LiveTradeBench, we run 50-day live evaluations of 21 LLMs across families. Results show that (1) high LMArena scores do not imply superior trading outcomes; (2) models display distinct portfolio styles reflecting risk appetite and reasoning dynamics; and (3) some LLMs effectively leverage live signals to adapt decisions. These findings expose a gap between static evaluation and real-world competence, motivating benchmarks that test sequential decision making and consistency under live uncertainty.
DiagramEval: Evaluating LLM-Generated Diagrams via Graphs
Oct 29, 2025



Diagrams play a central role in research papers for conveying ideas, yet they are often notoriously complex and labor-intensive to create. Although diagrams are presented as images, standard image generative models struggle to produce clear diagrams with well-defined structure. We argue that a promising direction is to generate demonstration diagrams directly in textual form as SVGs, which can leverage recent advances in large language models (LLMs). However, due to the complexity of components and the multimodal nature of diagrams, sufficiently discriminative and explainable metrics for evaluating the quality of LLM-generated diagrams remain lacking. In this paper, we propose DiagramEval, a novel evaluation metric designed to assess demonstration diagrams generated by LLMs. Specifically, DiagramEval conceptualizes diagrams as graphs, treating text elements as nodes and their connections as directed edges, and evaluates diagram quality using two new groups of metrics: node alignment and path alignment. For the first time, we effectively evaluate diagrams produced by state-of-the-art LLMs on recent research literature, quantitatively demonstrating the validity of our metrics. Furthermore, we show how the enhanced explainability of our proposed metrics offers valuable insights into the characteristics of LLM-generated diagrams. Code: https://github.com/ulab-uiuc/diagram-eval.
Sotopia-RL: Reward Design for Social Intelligence
Aug 05, 2025



Social intelligence has become a critical capability for large language models (LLMs), enabling them to engage effectively in real-world social tasks such as accommodation, persuasion, collaboration, and negotiation. Reinforcement learning (RL) is a natural fit for training socially intelligent agents because it allows models to learn sophisticated strategies directly through social interactions. However, social interactions have two key characteristics that set barriers for RL training: (1) partial observability, where utterances have indirect and delayed effects that complicate credit assignment, and (2) multi-dimensionality, where behaviors such as rapport-building or knowledge-seeking contribute indirectly to goal achievement. These characteristics make Markov decision process (MDP)-based RL with single-dimensional episode-level rewards inefficient and unstable. To address these challenges, we propose Sotopia-RL, a novel framework that refines coarse episode-level feedback into utterance-level, multi-dimensional rewards. Utterance-level credit assignment mitigates partial observability by attributing outcomes to individual utterances, while multi-dimensional rewards capture the full richness of social interactions and reduce reward hacking. Experiments in Sotopia, an open-ended social learning environment, demonstrate that Sotopia-RL achieves state-of-the-art social goal completion scores (7.17 on Sotopia-hard and 8.31 on Sotopia-full), significantly outperforming existing approaches. Ablation studies confirm the necessity of both utterance-level credit assignment and multi-dimensional reward design for RL training. Our implementation is publicly available at: https://github.com/sotopia-lab/sotopia-rl.
ConsistencyChecker: Tree-based Evaluation of LLM Generalization Capabilities
Jun 14, 2025Evaluating consistency in large language models (LLMs) is crucial for ensuring reliability, particularly in complex, multi-step interactions between humans and LLMs. Traditional self-consistency methods often miss subtle semantic changes in natural language and functional shifts in code or equations, which can accumulate over multiple transformations. To address this, we propose ConsistencyChecker, a tree-based evaluation framework designed to measure consistency through sequences of reversible transformations, including machine translation tasks and AI-assisted programming tasks. In our framework, nodes represent distinct text states, while edges correspond to pairs of inverse operations. Dynamic and LLM-generated benchmarks ensure a fair assessment of the model's generalization ability and eliminate benchmark leakage. Consistency is quantified based on similarity across different depths of the transformation tree. Experiments on eight models from various families and sizes show that ConsistencyChecker can distinguish the performance of different models. Notably, our consistency scores-computed entirely without using WMT paired data-correlate strongly (r > 0.7) with WMT 2024 auto-ranking, demonstrating the validity of our benchmark-free approach. Our implementation is available at: https://github.com/ulab-uiuc/consistencychecker.
Router-R1: Teaching LLMs Multi-Round Routing and Aggregation via Reinforcement Learning
Jun 10, 2025The rapid emergence of diverse large language models (LLMs) has spurred the development of LLM routers that assign user queries to the most suitable model. However, existing LLM routers typically perform a single-round, one-to-one mapping (\textit{i.e.}, assigning each query to a single model in isolation), which limits their capability to tackle complex tasks that demand the complementary strengths of multiple LLMs. In this paper, we present \textbf{Router-R1}, a reinforcement learning (RL)-based framework that formulates multi-LLM routing and aggregation as a sequential decision process. Router-R1 instantiates the router itself as a capable LLM, leveraging its reasoning ability to interleave "think" actions (internal deliberation) with "route" actions (dynamic model invocation), and integrates each response into its evolving context. To guide learning, we employ a lightweight rule-based reward comprising format rewards, final outcome rewards, and a novel cost reward for performance and cost trade-off optimization, opening a pathway toward optimizing performance-cost tradeoffs via RL. Router-R1 also conditions only on simple model descriptors such as pricing, latency, and example performance, enabling strong generalization to unseen model selection. Experiments on seven general and multi-hop QA benchmarks show that Router-R1 outperforms over several strong baselines, achieving superior performance while maintaining robust generalization and cost management.Code is available at https://github.com/ulab-uiuc/Router-R1.
Beyond Facts: Evaluating Intent Hallucination in Large Language Models
Jun 06, 2025



When exposed to complex queries containing multiple conditions, today's large language models (LLMs) tend to produce responses that only partially satisfy the query while neglecting certain conditions. We therefore introduce the concept of Intent Hallucination. In this phenomenon, LLMs either omit (neglecting to address certain parts) or misinterpret (responding to invented query parts) elements of the given query, leading to intent hallucinated generation. To systematically evaluate intent hallucination, we introduce FAITHQA, a novel benchmark for intent hallucination that contains 20,068 problems, covering both query-only and retrieval-augmented generation (RAG) setups with varying topics and difficulty. FAITHQA is the first hallucination benchmark that goes beyond factual verification, tailored to identify the fundamental cause of intent hallucination. By evaluating various LLMs on FAITHQA, we find that (1) intent hallucination is a common issue even for state-of-the-art models, and (2) the phenomenon stems from omission or misinterpretation of LLMs. To facilitate future research, we introduce an automatic LLM generation evaluation metric, CONSTRAINT SCORE, for detecting intent hallucination. Human evaluation results demonstrate that CONSTRAINT SCORE is closer to human performance for intent hallucination compared to baselines.
* Accepted to ACL 2025 main conference
SafeScientist: Toward Risk-Aware Scientific Discoveries by LLM Agents
May 29, 2025Recent advancements in large language model (LLM) agents have significantly accelerated scientific discovery automation, yet concurrently raised critical ethical and safety concerns. To systematically address these challenges, we introduce \textbf{SafeScientist}, an innovative AI scientist framework explicitly designed to enhance safety and ethical responsibility in AI-driven scientific exploration. SafeScientist proactively refuses ethically inappropriate or high-risk tasks and rigorously emphasizes safety throughout the research process. To achieve comprehensive safety oversight, we integrate multiple defensive mechanisms, including prompt monitoring, agent-collaboration monitoring, tool-use monitoring, and an ethical reviewer component. Complementing SafeScientist, we propose \textbf{SciSafetyBench}, a novel benchmark specifically designed to evaluate AI safety in scientific contexts, comprising 240 high-risk scientific tasks across 6 domains, alongside 30 specially designed scientific tools and 120 tool-related risk tasks. Extensive experiments demonstrate that SafeScientist significantly improves safety performance by 35\% compared to traditional AI scientist frameworks, without compromising scientific output quality. Additionally, we rigorously validate the robustness of our safety pipeline against diverse adversarial attack methods, further confirming the effectiveness of our integrated approach. The code and data will be available at https://github.com/ulab-uiuc/SafeScientist. \textcolor{red}{Warning: this paper contains example data that may be offensive or harmful.}