 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLower Bounds and Conditioning of Differentiable Games
Jun 17, 2019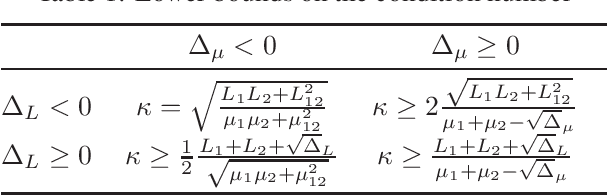
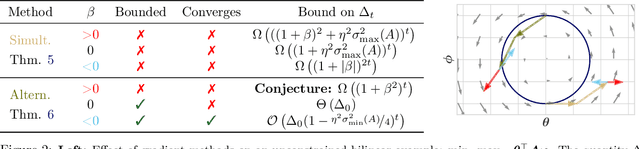
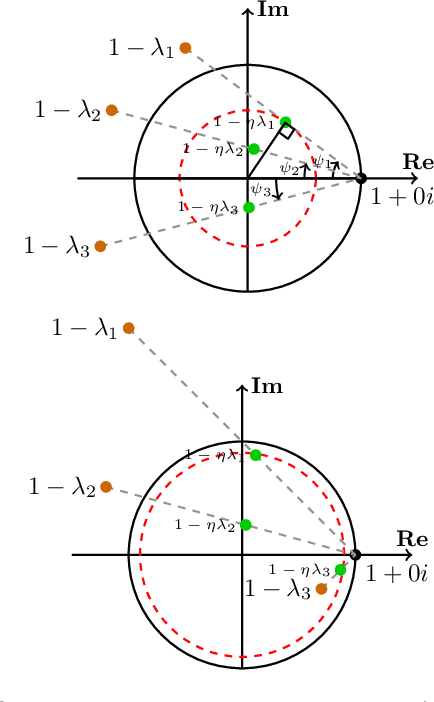
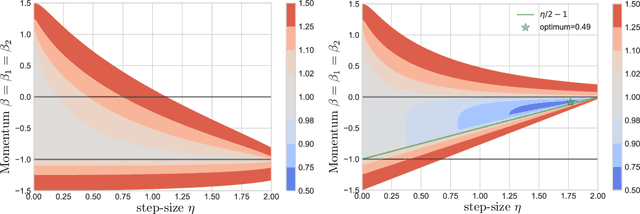
Many recent machine learning tools rely on differentiable game formulations. While several numerical methods have been proposed for these types of games, most of the work has been on convergence proofs or on upper bounds for the rate of convergence of those methods. In this work, we approach the question of fundamental iteration complexity by providing lower bounds. We generalise Nesterov's argument -- used in single-objective optimisation to derive a lower bound for a class of first-order black box optimisation algorithms -- to games. Moreover, we extend to games the p-SCLI framework used to derive spectral lower bounds for a large class of derivative-based single-objective optimisers. Finally, we propose a definition of the condition number arising from our lower bound analysis that matches the conditioning observed in upper bounds. Our condition number is more expressive than previously used definitions, as it covers a wide range of games, including bilinear games that lack strong convex-concavity.
State-Reification Networks: Improving Generalization by Modeling the Distribution of Hidden Representations
May 26, 2019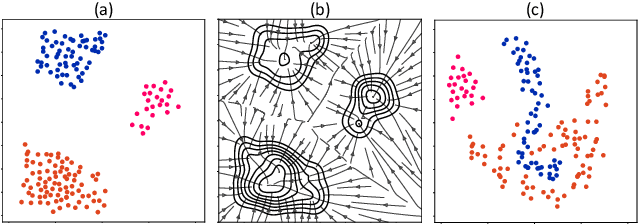
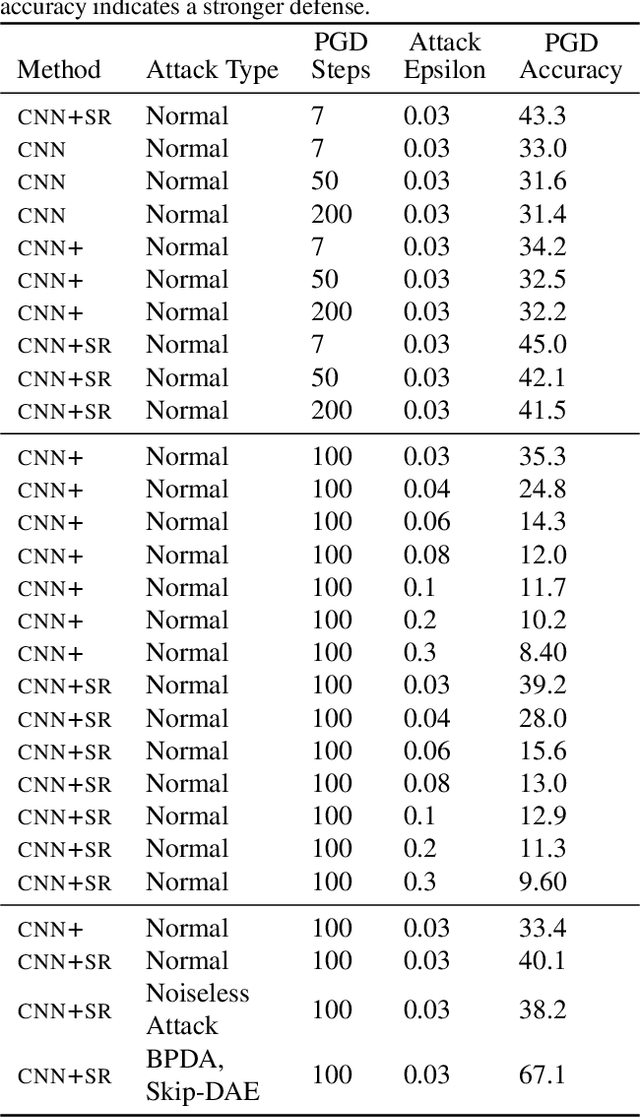
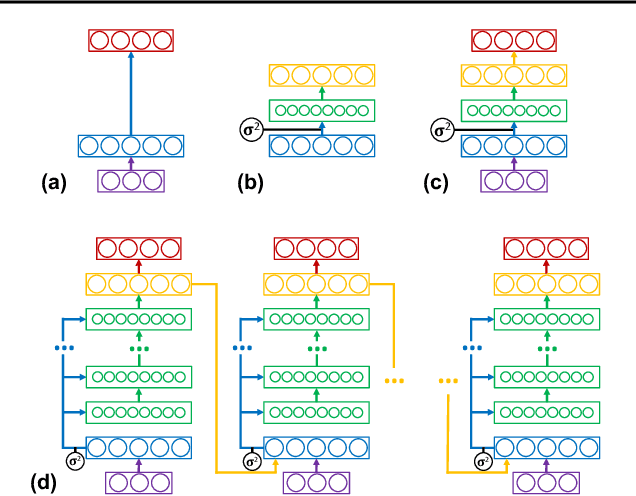
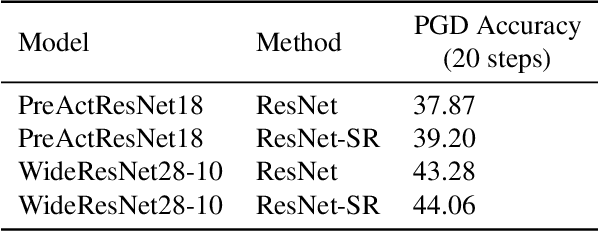
Machine learning promises methods that generalize well from finite labeled data. However, the brittleness of existing neural net approaches is revealed by notable failures, such as the existence of adversarial examples that are misclassified despite being nearly identical to a training example, or the inability of recurrent sequence-processing nets to stay on track without teacher forcing. We introduce a method, which we refer to as \emph{state reification}, that involves modeling the distribution of hidden states over the training data and then projecting hidden states observed during testing toward this distribution. Our intuition is that if the network can remain in a familiar manifold of hidden space, subsequent layers of the net should be well trained to respond appropriately. We show that this state-reification method helps neural nets to generalize better, especially when labeled data are sparse, and also helps overcome the challenge of achieving robust generalization with adversarial training.
SysML: The New Frontier of Machine Learning Systems
May 01, 2019Machine learning (ML) techniques are enjoying rapidly increasing adoption. However, designing and implementing the systems that support ML models in real-world deployments remains a significant obstacle, in large part due to the radically different development and deployment profile of modern ML methods, and the range of practical concerns that come with broader adoption. We propose to foster a new systems machine learning research community at the intersection of the traditional systems and ML communities, focused on topics such as hardware systems for ML, software systems for ML, and ML optimized for metrics beyond predictive accuracy. To do this, we describe a new conference, SysML, that explicitly targets research at the intersection of systems and machine learning with a program committee split evenly between experts in systems and ML, and an explicit focus on topics at the intersection of the two.
Multi-objective training of Generative Adversarial Networks with multiple discriminators
Jan 24, 2019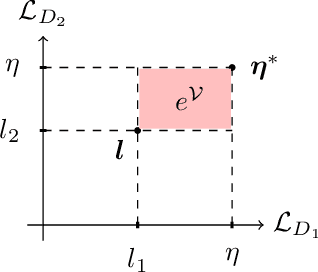

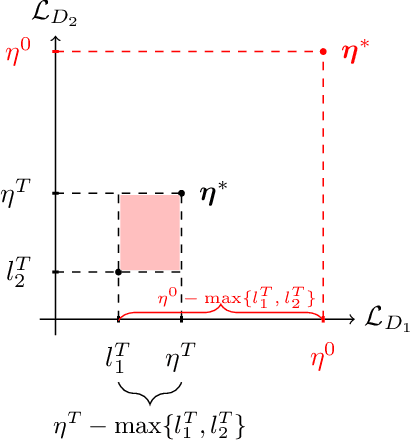
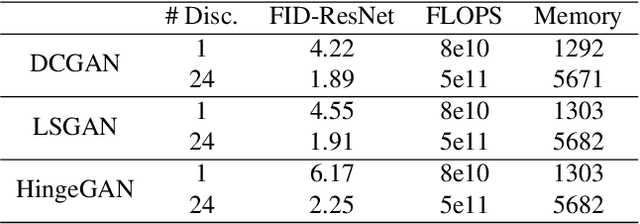
Recent literature has demonstrated promising results for training Generative Adversarial Networks by employing a set of discriminators, in contrast to the traditional game involving one generator against a single adversary. Such methods perform single-objective optimization on some simple consolidation of the losses, e.g. an arithmetic average. In this work, we revisit the multiple-discriminator setting by framing the simultaneous minimization of losses provided by different models as a multi-objective optimization problem. Specifically, we evaluate the performance of multiple gradient descent and the hypervolume maximization algorithm on a number of different datasets. Moreover, we argue that the previously proposed methods and hypervolume maximization can all be seen as variations of multiple gradient descent in which the update direction can be computed efficiently. Our results indicate that hypervolume maximization presents a better compromise between sample quality and computational cost than previous methods.
A Modern Take on the Bias-Variance Tradeoff in Neural Networks
Oct 19, 2018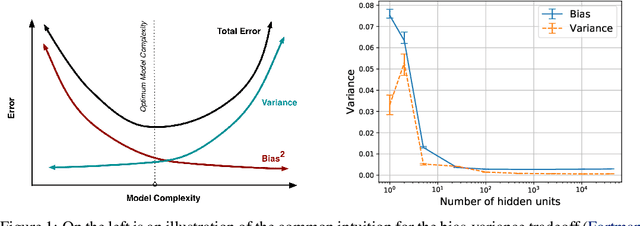
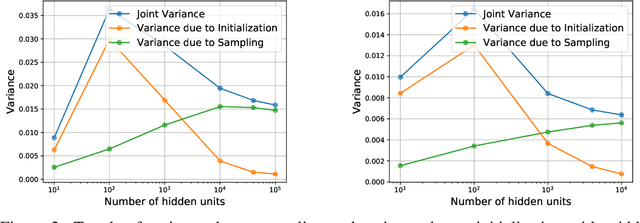
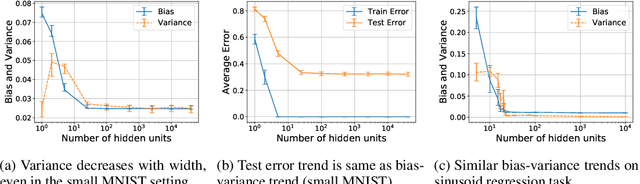
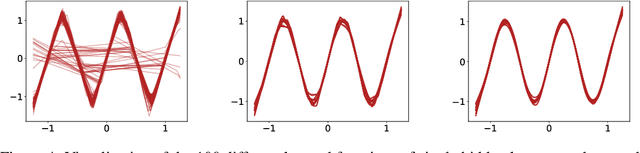
We revisit the bias-variance tradeoff for neural networks in light of modern empirical findings. The traditional bias-variance tradeoff in machine learning suggests that as model complexity grows, variance increases. Classical bounds in statistical learning theory point to the number of parameters in a model as a measure of model complexity, which means the tradeoff would indicate that variance increases with the size of neural networks. However, we empirically find that variance due to training set sampling is roughly \textit{constant} (with both width and depth) in practice. Variance caused by the non-convexity of the loss landscape is different. We find that it decreases with width and increases with depth, in our setting. We provide theoretical analysis, in a simplified setting inspired by linear models, that is consistent with our empirical findings for width. We view bias-variance as a useful lens to study generalization through and encourage further theoretical explanation from this perspective.
Manifold Mixup: Learning Better Representations by Interpolating Hidden States
Oct 04, 2018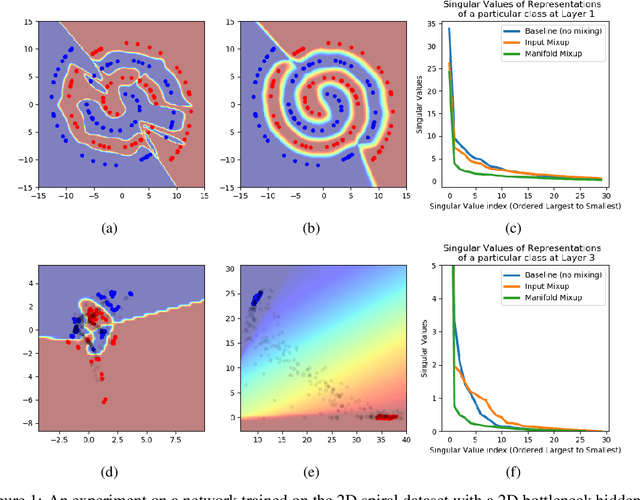
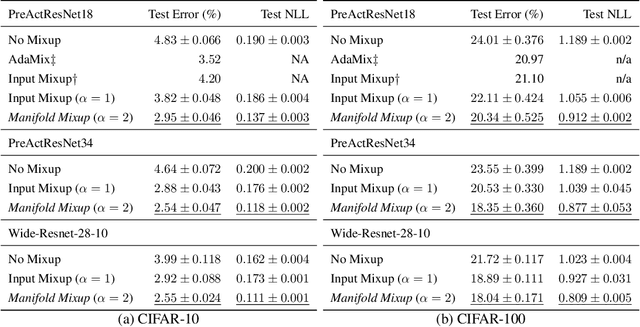
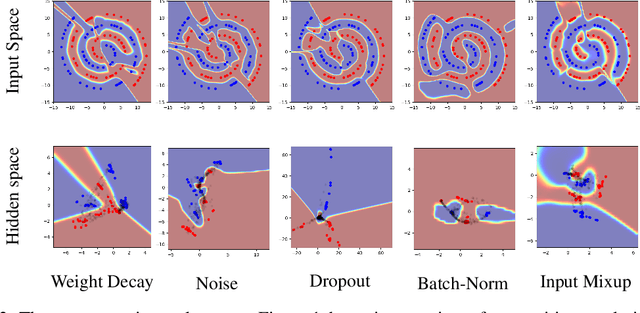
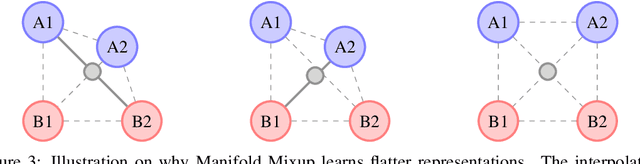
Deep networks often perform well on the data distribution on which they are trained, yet give incorrect (and often very confident) answers when evaluated on points from off of the training distribution. This is exemplified by the adversarial examples phenomenon but can also be seen in terms of model generalization and domain shift. Ideally, a model would assign lower confidence to points unlike those from the training distribution. We propose a regularizer which addresses this issue by training with interpolated hidden states and encouraging the classifier to be less confident at these points. Because the hidden states are learned, this has an important effect of encouraging the hidden states for a class to be concentrated in such a way so that interpolations within the same class or between two different classes do not intersect with the real data points from other classes. This has a major advantage in that it avoids the underfitting which can result from interpolating in the input space. We prove that the exact condition for this problem of underfitting to be avoided by Manifold Mixup is that the dimensionality of the hidden states exceeds the number of classes, which is often the case in practice. Additionally, this concentration can be seen as making the features in earlier layers more discriminative. We show that despite requiring no significant additional computation, Manifold Mixup achieves large improvements over strong baselines in supervised learning, robustness to single-step adversarial attacks, semi-supervised learning, and Negative Log-Likelihood on held out samples.
Negative Momentum for Improved Game Dynamics
Jul 12, 2018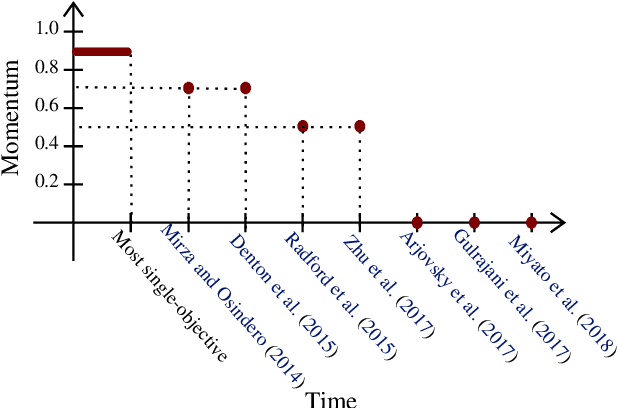
Games generalize the optimization paradigm by introducing different objective functions for different optimizing agents, known as players. Generative Adversarial Networks (GANs) are arguably the most popular game formulation in recent machine learning literature. GANs achieve great results on generating realistic natural images, however they are known for being difficult to train. Training them involves finding a Nash equilibrium, typically performed using gradient descent on the two players' objectives. Game dynamics can induce rotations that slow down convergence to a Nash equilibrium, or prevent it altogether. We provide a theoretical analysis of the game dynamics. Our analysis, supported by experiments, shows that gradient descent with a negative momentum term can improve the convergence properties of some GANs.
Learning Representations and Generative Models for 3D Point Clouds
Jun 12, 2018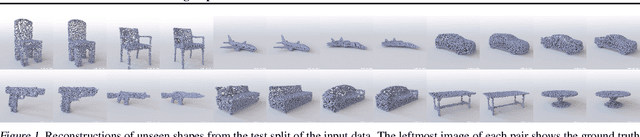
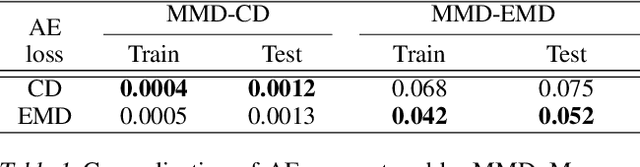

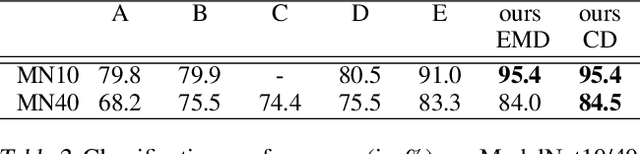
Three-dimensional geometric data offer an excellent domain for studying representation learning and generative modeling. In this paper, we look at geometric data represented as point clouds. We introduce a deep AutoEncoder (AE) network with state-of-the-art reconstruction quality and generalization ability. The learned representations outperform existing methods on 3D recognition tasks and enable shape editing via simple algebraic manipulations, such as semantic part editing, shape analogies and shape interpolation, as well as shape completion. We perform a thorough study of different generative models including GANs operating on the raw point clouds, significantly improved GANs trained in the fixed latent space of our AEs, and Gaussian Mixture Models (GMMs). To quantitatively evaluate generative models we introduce measures of sample fidelity and diversity based on matchings between sets of point clouds. Interestingly, our evaluation of generalization, fidelity and diversity reveals that GMMs trained in the latent space of our AEs yield the best results overall.
Fortified Networks: Improving the Robustness of Deep Networks by Modeling the Manifold of Hidden Representations
Apr 07, 2018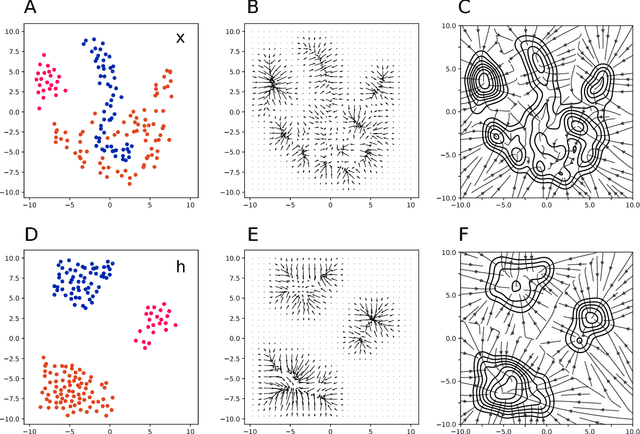
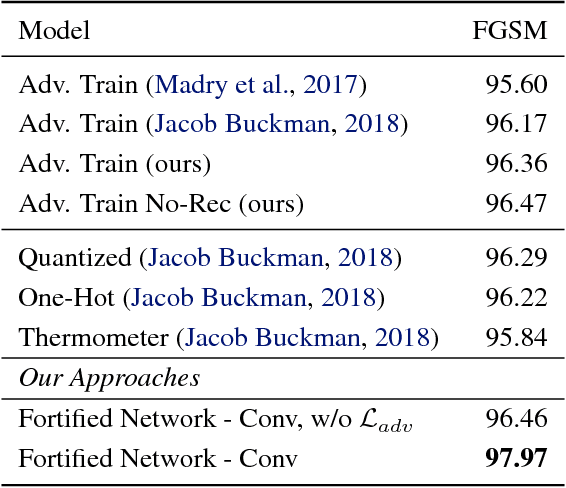
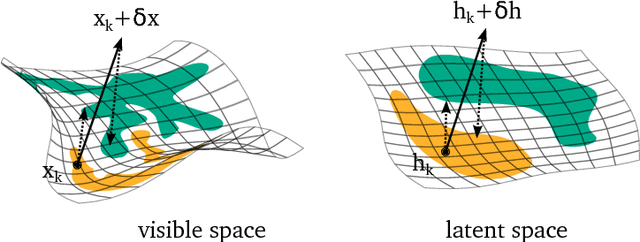
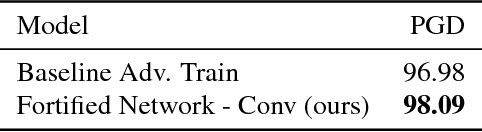
Deep networks have achieved impressive results across a variety of important tasks. However a known weakness is a failure to perform well when evaluated on data which differ from the training distribution, even if these differences are very small, as is the case with adversarial examples. We propose Fortified Networks, a simple transformation of existing networks, which fortifies the hidden layers in a deep network by identifying when the hidden states are off of the data manifold, and maps these hidden states back to parts of the data manifold where the network performs well. Our principal contribution is to show that fortifying these hidden states improves the robustness of deep networks and our experiments (i) demonstrate improved robustness to standard adversarial attacks in both black-box and white-box threat models; (ii) suggest that our improvements are not primarily due to the gradient masking problem and (iii) show the advantage of doing this fortification in the hidden layers instead of the input space.
YellowFin and the Art of Momentum Tuning
Feb 14, 2018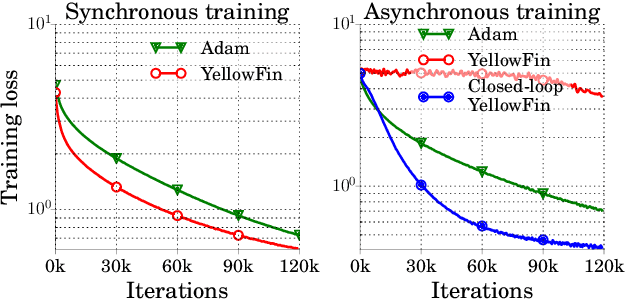
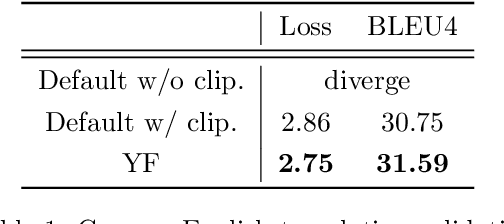
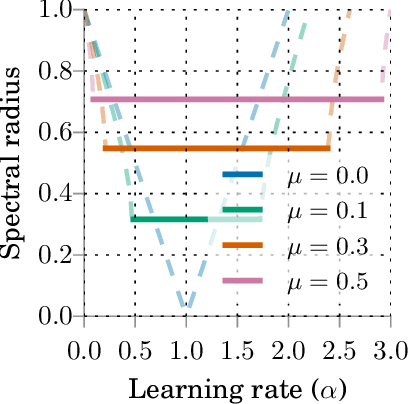
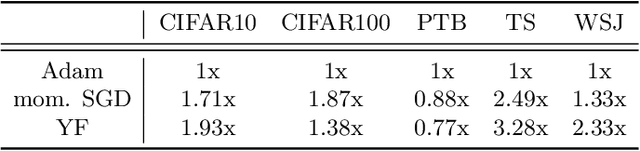
Hyperparameter tuning is one of the most time-consuming workloads in deep learning. State-of-the-art optimizers, such as AdaGrad, RMSProp and Adam, reduce this labor by adaptively tuning an individual learning rate for each variable. Recently researchers have shown renewed interest in simpler methods like momentum SGD as they may yield better test metrics. Motivated by this trend, we ask: can simple adaptive methods based on SGD perform as well or better? We revisit the momentum SGD algorithm and show that hand-tuning a single learning rate and momentum makes it competitive with Adam. We then analyze its robustness to learning rate misspecification and objective curvature variation. Based on these insights, we design YellowFin, an automatic tuner for momentum and learning rate in SGD. YellowFin optionally uses a negative-feedback loop to compensate for the momentum dynamics in asynchronous settings on the fly. We empirically show that YellowFin can converge in fewer iterations than Adam on ResNets and LSTMs for image recognition, language modeling and constituency parsing, with a speedup of up to 3.28x in synchronous and up to 2.69x in asynchronous settings.