 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWS-IMUBench: Can Weakly Supervised Methods from Audio, Image, and Video Be Adapted for IMU-based Temporal Action Localization?
Feb 02, 2026IMU-based Human Activity Recognition (HAR) has enabled a wide range of ubiquitous computing applications, yet its dominant clip classification paradigm cannot capture the rich temporal structure of real-world behaviors. This motivates a shift toward IMU Temporal Action Localization (IMU-TAL), which predicts both action categories and their start/end times in continuous streams. However, current progress is strongly bottlenecked by the need for dense, frame-level boundary annotations, which are costly and difficult to scale. To address this bottleneck, we introduce WS-IMUBench, a systematic benchmark study of weakly supervised IMU-TAL (WS-IMU-TAL) under only sequence-level labels. Rather than proposing a new localization algorithm, we evaluate how well established weakly supervised localization paradigms from audio, image, and video transfer to IMU-TAL under only sequence-level labels. We benchmark seven representative weakly supervised methods on seven public IMU datasets, resulting in over 3,540 model training runs and 7,080 inference evaluations. Guided by three research questions on transferability, effectiveness, and insights, our findings show that (i) transfer is modality-dependent, with temporal-domain methods generally more stable than image-derived proposal-based approaches; (ii) weak supervision can be competitive on favorable datasets (e.g., with longer actions and higher-dimensional sensing); and (iii) dominant failure modes arise from short actions, temporal ambiguity, and proposal quality. Finally, we outline concrete directions for advancing WS-IMU-TAL (e.g., IMU-specific proposal generation, boundary-aware objectives, and stronger temporal reasoning). Beyond individual results, WS-IMUBench establishes a reproducible benchmarking template, datasets, protocols, and analyses, to accelerate community-wide progress toward scalable WS-IMU-TAL.
MobiDiary: Autoregressive Action Captioning with Wearable Devices and Wireless Signals
Jan 13, 2026Human Activity Recognition (HAR) in smart homes is critical for health monitoring and assistive living. While vision-based systems are common, they face privacy concerns and environmental limitations (e.g., occlusion). In this work, we present MobiDiary, a framework that generates natural language descriptions of daily activities directly from heterogeneous physical signals (specifically IMU and Wi-Fi). Unlike conventional approaches that restrict outputs to pre-defined labels, MobiDiary produces expressive, human-readable summaries. To bridge the semantic gap between continuous, noisy physical signals and discrete linguistic descriptions, we propose a unified sensor encoder. Instead of relying on modality-specific engineering, we exploit the shared inductive biases of motion-induced signals--where both inertial and wireless data reflect underlying kinematic dynamics. Specifically, our encoder utilizes a patch-based mechanism to capture local temporal correlations and integrates heterogeneous placement embedding to unify spatial contexts across different sensors. These unified signal tokens are then fed into a Transformer-based decoder, which employs an autoregressive mechanism to generate coherent action descriptions word-by-word. We comprehensively evaluate our approach on multiple public benchmarks (XRF V2, UWash, and WiFiTAD). Experimental results demonstrate that MobiDiary effectively generalizes across modalities, achieving state-of-the-art performance on captioning metrics (e.g., BLEU@4, CIDEr, RMC) and outperforming specialized baselines in continuous action understanding.
Cross-domain EEG-based Emotion Recognition with Contrastive Learning
Nov 07, 2025Electroencephalogram (EEG)-based emotion recognition is vital for affective computing but faces challenges in feature utilization and cross-domain generalization. This work introduces EmotionCLIP, which reformulates recognition as an EEG-text matching task within the CLIP framework. A tailored backbone, SST-LegoViT, captures spatial, spectral, and temporal features using multi-scale convolution and Transformer modules. Experiments on SEED and SEED-IV datasets show superior cross-subject accuracies of 88.69% and 73.50%, and cross-time accuracies of 88.46% and 77.54%, outperforming existing models. Results demonstrate the effectiveness of multimodal contrastive learning for robust EEG emotion recognition.
What's on Your Plate? Inferring Chinese Cuisine Intake from Wearable IMUs
Nov 07, 2025Accurate food intake detection is vital for dietary monitoring and chronic disease prevention. Traditional self-report methods are prone to recall bias, while camera-based approaches raise concerns about privacy. Furthermore, existing wearable-based methods primarily focus on a limited number of food types, such as hamburgers and pizza, failing to address the vast diversity of Chinese cuisine. To bridge this gap, we propose CuisineSense, a system that classifies Chinese food types by integrating hand motion cues from a smartwatch with head dynamics from smart glasses. To filter out irrelevant daily activities, we design a two-stage detection pipeline. The first stage identifies eating states by distinguishing characteristic temporal patterns from non-eating behaviors. The second stage then conducts fine-grained food type recognition based on the motions captured during food intake. To evaluate CuisineSense, we construct a dataset comprising 27.5 hours of IMU recordings across 11 food categories and 10 participants. Experiments demonstrate that CuisineSense achieves high accuracy in both eating state detection and food classification, offering a practical solution for unobtrusive, wearable-based dietary monitoring.The system code is publicly available at https://github.com/joeeeeyin/CuisineSense.git.
What Matters in LLM-Based Feature Extractor for Recommender? A Systematic Analysis of Prompts, Models, and Adaptation
Sep 18, 2025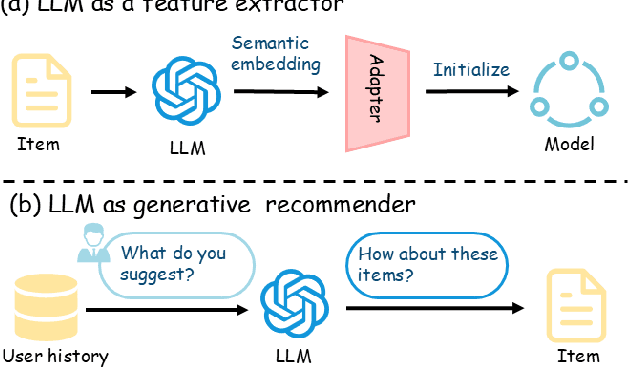

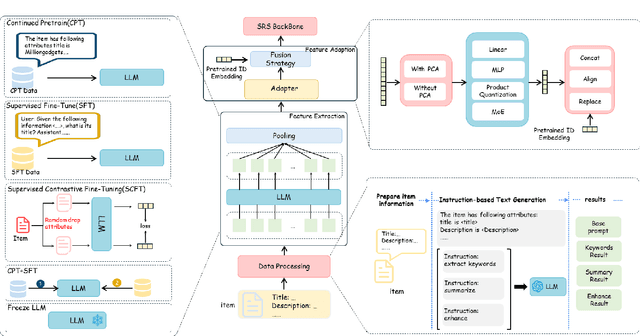

Using Large Language Models (LLMs) to generate semantic features has been demonstrated as a powerful paradigm for enhancing Sequential Recommender Systems (SRS). This typically involves three stages: processing item text, extracting features with LLMs, and adapting them for downstream models. However, existing methods vary widely in prompting, architecture, and adaptation strategies, making it difficult to fairly compare design choices and identify what truly drives performance. In this work, we propose RecXplore, a modular analytical framework that decomposes the LLM-as-feature-extractor pipeline into four modules: data processing, semantic feature extraction, feature adaptation, and sequential modeling. Instead of proposing new techniques, RecXplore revisits and organizes established methods, enabling systematic exploration of each module in isolation. Experiments on four public datasets show that simply combining the best designs from existing techniques without exhaustive search yields up to 18.7% relative improvement in NDCG@5 and 12.7% in HR@5 over strong baselines. These results underscore the utility of modular benchmarking for identifying effective design patterns and promoting standardized research in LLM-enhanced recommendation.
MiniMax-M1: Scaling Test-Time Compute Efficiently with Lightning Attention
Jun 16, 2025



We introduce MiniMax-M1, the world's first open-weight, large-scale hybrid-attention reasoning model. MiniMax-M1 is powered by a hybrid Mixture-of-Experts (MoE) architecture combined with a lightning attention mechanism. The model is developed based on our previous MiniMax-Text-01 model, which contains a total of 456 billion parameters with 45.9 billion parameters activated per token. The M1 model natively supports a context length of 1 million tokens, 8x the context size of DeepSeek R1. Furthermore, the lightning attention mechanism in MiniMax-M1 enables efficient scaling of test-time compute. These properties make M1 particularly suitable for complex tasks that require processing long inputs and thinking extensively. MiniMax-M1 is trained using large-scale reinforcement learning (RL) on diverse problems including sandbox-based, real-world software engineering environments. In addition to M1's inherent efficiency advantage for RL training, we propose CISPO, a novel RL algorithm to further enhance RL efficiency. CISPO clips importance sampling weights rather than token updates, outperforming other competitive RL variants. Combining hybrid-attention and CISPO enables MiniMax-M1's full RL training on 512 H800 GPUs to complete in only three weeks, with a rental cost of just $534,700. We release two versions of MiniMax-M1 models with 40K and 80K thinking budgets respectively, where the 40K model represents an intermediate phase of the 80K training. Experiments on standard benchmarks show that our models are comparable or superior to strong open-weight models such as the original DeepSeek-R1 and Qwen3-235B, with particular strengths in complex software engineering, tool utilization, and long-context tasks. We publicly release MiniMax-M1 at https://github.com/MiniMax-AI/MiniMax-M1.
SynLogic: Synthesizing Verifiable Reasoning Data at Scale for Learning Logical Reasoning and Beyond
May 26, 2025Recent advances such as OpenAI-o1 and DeepSeek R1 have demonstrated the potential of Reinforcement Learning (RL) to enhance reasoning abilities in Large Language Models (LLMs). While open-source replication efforts have primarily focused on mathematical and coding domains, methods and resources for developing general reasoning capabilities remain underexplored. This gap is partly due to the challenge of collecting diverse and verifiable reasoning data suitable for RL. We hypothesize that logical reasoning is critical for developing general reasoning capabilities, as logic forms a fundamental building block of reasoning. In this work, we present SynLogic, a data synthesis framework and dataset that generates diverse logical reasoning data at scale, encompassing 35 diverse logical reasoning tasks. The SynLogic approach enables controlled synthesis of data with adjustable difficulty and quantity. Importantly, all examples can be verified by simple rules, making them ideally suited for RL with verifiable rewards. In our experiments, we validate the effectiveness of RL training on the SynLogic dataset based on 7B and 32B models. SynLogic leads to state-of-the-art logical reasoning performance among open-source datasets, surpassing DeepSeek-R1-Distill-Qwen-32B by 6 points on BBEH. Furthermore, mixing SynLogic data with mathematical and coding tasks improves the training efficiency of these domains and significantly enhances reasoning generalization. Notably, our mixed training model outperforms DeepSeek-R1-Zero-Qwen-32B across multiple benchmarks. These findings position SynLogic as a valuable resource for advancing the broader reasoning capabilities of LLMs. We open-source both the data synthesis pipeline and the SynLogic dataset at https://github.com/MiniMax-AI/SynLogic.
Robotic Grinding Skills Learning Based on Geodesic Length Dynamic Motion Primitives
Apr 24, 2025Learning grinding skills from human craftsmen via imitation learning has become a key research topic in robotic machining. Due to their strong generalization and robustness to external disturbances, Dynamical Movement Primitives (DMPs) offer a promising approach for robotic grinding skill learning. However, directly applying DMPs to grinding tasks faces challenges, such as low orientation accuracy, unsynchronized position-orientation-force, and limited generalization for surface trajectories. To address these issues, this paper proposes a robotic grinding skill learning method based on geodesic length DMPs (Geo-DMPs). First, a normalized 2D weighted Gaussian kernel and intrinsic mean clustering algorithm are developed to extract geometric features from multiple demonstrations. Then, an orientation manifold distance metric removes the time dependency in traditional orientation DMPs, enabling accurate orientation learning via Geo-DMPs. A synchronization encoding framework is further proposed to jointly model position, orientation, and force using a geodesic length-based phase function. This framework enables robotic grinding actions to be generated between any two surface points. Experiments on robotic chamfer grinding and free-form surface grinding validate that the proposed method achieves high geometric accuracy and generalization in skill encoding and generation. To our knowledge, this is the first attempt to use DMPs for jointly learning and generating grinding skills in position, orientation, and force on model-free surfaces, offering a novel path for robotic grinding.
Talk is Not Always Cheap: Promoting Wireless Sensing Models with Text Prompts
Apr 22, 2025Wireless signal-based human sensing technologies, such as WiFi, millimeter-wave (mmWave) radar, and Radio Frequency Identification (RFID), enable the detection and interpretation of human presence, posture, and activities, thereby providing critical support for applications in public security, healthcare, and smart environments. These technologies exhibit notable advantages due to their non-contact operation and environmental adaptability; however, existing systems often fail to leverage the textual information inherent in datasets. To address this, we propose an innovative text-enhanced wireless sensing framework, WiTalk, that seamlessly integrates semantic knowledge through three hierarchical prompt strategies-label-only, brief description, and detailed action description-without requiring architectural modifications or incurring additional data costs. We rigorously validate this framework across three public benchmark datasets: XRF55 for human action recognition (HAR), and WiFiTAL and XRFV2 for WiFi temporal action localization (TAL). Experimental results demonstrate significant performance improvements: on XRF55, accuracy for WiFi, RFID, and mmWave increases by 3.9%, 2.59%, and 0.46%, respectively; on WiFiTAL, the average performance of WiFiTAD improves by 4.98%; and on XRFV2, the mean average precision gains across various methods range from 4.02% to 13.68%. Our codes have been included in https://github.com/yangzhenkui/WiTalk.
One Quantizer is Enough: Toward a Lightweight Audio Codec
Apr 07, 2025Neural audio codecs have recently gained traction for their ability to compress high-fidelity audio and generate discrete tokens that can be utilized in downstream generative modeling tasks. However, leading approaches often rely on resource-intensive models and multi-quantizer architectures, resulting in considerable computational overhead and constrained real-world applicability. In this paper, we present SQCodec, a lightweight neural audio codec that leverages a single quantizer to address these limitations. SQCodec explores streamlined convolutional networks and local Transformer modules, alongside TConv, a novel mechanism designed to capture acoustic variations across multiple temporal scales, thereby enhancing reconstruction fidelity while reducing model complexity. Extensive experiments across diverse datasets show that SQCodec achieves audio quality comparable to multi-quantizer baselines, while its single-quantizer design offers enhanced adaptability and its lightweight architecture reduces resource consumption by an order of magnitude. The source code is publicly available at https://github.com/zhai-lw/SQCodec.