 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Implicit Aggregation: Robust Image Representation for Place Recognition in the Transformer Era
Nov 08, 2025Visual place recognition (VPR) is typically regarded as a specific image retrieval task, whose core lies in representing images as global descriptors. Over the past decade, dominant VPR methods (e.g., NetVLAD) have followed a paradigm that first extracts the patch features/tokens of the input image using a backbone, and then aggregates these patch features into a global descriptor via an aggregator. This backbone-plus-aggregator paradigm has achieved overwhelming dominance in the CNN era and remains widely used in transformer-based models. In this paper, however, we argue that a dedicated aggregator is not necessary in the transformer era, that is, we can obtain robust global descriptors only with the backbone. Specifically, we introduce some learnable aggregation tokens, which are prepended to the patch tokens before a particular transformer block. All these tokens will be jointly processed and interact globally via the intrinsic self-attention mechanism, implicitly aggregating useful information within the patch tokens to the aggregation tokens. Finally, we only take these aggregation tokens from the last output tokens and concatenate them as the global representation. Although implicit aggregation can provide robust global descriptors in an extremely simple manner, where and how to insert additional tokens, as well as the initialization of tokens, remains an open issue worthy of further exploration. To this end, we also propose the optimal token insertion strategy and token initialization method derived from empirical studies. Experimental results show that our method outperforms state-of-the-art methods on several VPR datasets with higher efficiency and ranks 1st on the MSLS challenge leaderboard. The code is available at https://github.com/lu-feng/image.
Enhancing Sa2VA for Referent Video Object Segmentation: 2nd Solution for 7th LSVOS RVOS Track
Sep 19, 2025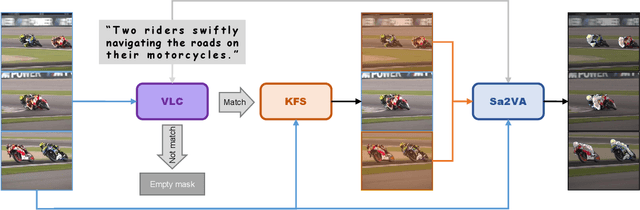



Referential Video Object Segmentation (RVOS) aims to segment all objects in a video that match a given natural language description, bridging the gap between vision and language understanding. Recent work, such as Sa2VA, combines Large Language Models (LLMs) with SAM~2, leveraging the strong video reasoning capability of LLMs to guide video segmentation. In this work, we present a training-free framework that substantially improves Sa2VA's performance on the RVOS task. Our method introduces two key components: (1) a Video-Language Checker that explicitly verifies whether the subject and action described in the query actually appear in the video, thereby reducing false positives; and (2) a Key-Frame Sampler that adaptively selects informative frames to better capture both early object appearances and long-range temporal context. Without any additional training, our approach achieves a J&F score of 64.14% on the MeViS test set, ranking 2nd place in the RVOS track of the 7th LSVOS Challenge at ICCV 2025.
Pseudo-Label Enhanced Cascaded Framework: 2nd Technical Report for LSVOS 2025 VOS Track
Sep 18, 2025



Complex Video Object Segmentation (VOS) presents significant challenges in accurately segmenting objects across frames, especially in the presence of small and similar targets, frequent occlusions, rapid motion, and complex interactions. In this report, we present our solution for the LSVOS 2025 VOS Track based on the SAM2 framework. We adopt a pseudo-labeling strategy during training: a trained SAM2 checkpoint is deployed within the SAM2Long framework to generate pseudo labels for the MOSE test set, which are then combined with existing data for further training. For inference, the SAM2Long framework is employed to obtain our primary segmentation results, while an open-source SeC model runs in parallel to produce complementary predictions. A cascaded decision mechanism dynamically integrates outputs from both models, exploiting the temporal stability of SAM2Long and the concept-level robustness of SeC. Benefiting from pseudo-label training and cascaded multi-model inference, our approach achieves a J\&F score of 0.8616 on the MOSE test set -- +1.4 points over our SAM2Long baseline -- securing the 2nd place in the LSVOS 2025 VOS Track, and demonstrating strong robustness and accuracy in long, complex video segmentation scenarios.
In the Eye of MLLM: Benchmarking Egocentric Video Intent Understanding with Gaze-Guided Prompting
Sep 09, 2025The emergence of advanced multimodal large language models (MLLMs) has significantly enhanced AI assistants' ability to process complex information across modalities. Recently, egocentric videos, by directly capturing user focus, actions, and context in an unified coordinate, offer an exciting opportunity to enable proactive and personalized AI user experiences with MLLMs. However, existing benchmarks overlook the crucial role of gaze as an indicator of user intent. To address this gap, we introduce EgoGazeVQA, an egocentric gaze-guided video question answering benchmark that leverages gaze information to improve the understanding of longer daily-life videos. EgoGazeVQA consists of gaze-based QA pairs generated by MLLMs and refined by human annotators. Our experiments reveal that existing MLLMs struggle to accurately interpret user intentions. In contrast, our gaze-guided intent prompting methods significantly enhance performance by integrating spatial, temporal, and intent-related cues. We further conduct experiments on gaze-related fine-tuning and analyze how gaze estimation accuracy impacts prompting effectiveness. These results underscore the value of gaze for more personalized and effective AI assistants in egocentric settings.
SelaVPR++: Towards Seamless Adaptation of Foundation Models for Efficient Place Recognition
Feb 23, 2025Recent studies show that the visual place recognition (VPR) method using pre-trained visual foundation models can achieve promising performance. In our previous work, we propose a novel method to realize seamless adaptation of foundation models to VPR (SelaVPR). This method can produce both global and local features that focus on discriminative landmarks to recognize places for two-stage VPR by a parameter-efficient adaptation approach. Although SelaVPR has achieved competitive results, we argue that the previous adaptation is inefficient in training time and GPU memory usage, and the re-ranking paradigm is also costly in retrieval latency and storage usage. In pursuit of higher efficiency and better performance, we propose an extension of the SelaVPR, called SelaVPR++. Concretely, we first design a parameter-, time-, and memory-efficient adaptation method that uses lightweight multi-scale convolution (MultiConv) adapters to refine intermediate features from the frozen foundation backbone. This adaptation method does not back-propagate gradients through the backbone during training, and the MultiConv adapter facilitates feature interactions along the spatial axes and introduces proper local priors, thus achieving higher efficiency and better performance. Moreover, we propose an innovative re-ranking paradigm for more efficient VPR. Instead of relying on local features for re-ranking, which incurs huge overhead in latency and storage, we employ compact binary features for initial retrieval and robust floating-point (global) features for re-ranking. To obtain such binary features, we propose a similarity-constrained deep hashing method, which can be easily integrated into the VPR pipeline. Finally, we improve our training strategy and unify the training protocol of several common training datasets to merge them for better training of VPR models. Extensive experiments show that ......
3D Prior is All You Need: Cross-Task Few-shot 2D Gaze Estimation
Feb 06, 20253D and 2D gaze estimation share the fundamental objective of capturing eye movements but are traditionally treated as two distinct research domains. In this paper, we introduce a novel cross-task few-shot 2D gaze estimation approach, aiming to adapt a pre-trained 3D gaze estimation network for 2D gaze prediction on unseen devices using only a few training images. This task is highly challenging due to the domain gap between 3D and 2D gaze, unknown screen poses, and limited training data. To address these challenges, we propose a novel framework that bridges the gap between 3D and 2D gaze. Our framework contains a physics-based differentiable projection module with learnable parameters to model screen poses and project 3D gaze into 2D gaze. The framework is fully differentiable and can integrate into existing 3D gaze networks without modifying their original architecture. Additionally, we introduce a dynamic pseudo-labelling strategy for flipped images, which is particularly challenging for 2D labels due to unknown screen poses. To overcome this, we reverse the projection process by converting 2D labels to 3D space, where flipping is performed. Notably, this 3D space is not aligned with the camera coordinate system, so we learn a dynamic transformation matrix to compensate for this misalignment. We evaluate our method on MPIIGaze, EVE, and GazeCapture datasets, collected respectively on laptops, desktop computers, and mobile devices. The superior performance highlights the effectiveness of our approach, and demonstrates its strong potential for real-world applications.
TdAttenMix: Top-Down Attention Guided Mixup
Jan 26, 2025



CutMix is a data augmentation strategy that cuts and pastes image patches to mixup training data. Existing methods pick either random or salient areas which are often inconsistent to labels, thus misguiding the training model. By our knowledge, we integrate human gaze to guide cutmix for the first time. Since human attention is driven by both high-level recognition and low-level clues, we propose a controllable Top-down Attention Guided Module to obtain a general artificial attention which balances top-down and bottom-up attention. The proposed TdATttenMix then picks the patches and adjust the label mixing ratio that focuses on regions relevant to the current label. Experimental results demonstrate that our TdAttenMix outperforms existing state-of-the-art mixup methods across eight different benchmarks. Additionally, we introduce a new metric based on the human gaze and use this metric to investigate the issue of image-label inconsistency. Project page: \url{https://github.com/morning12138/TdAttenMix}
EDTformer: An Efficient Decoder Transformer for Visual Place Recognition
Dec 01, 2024



Visual place recognition (VPR) aims to determine the general geographical location of a query image by retrieving visually similar images from a large geo-tagged database. To obtain a global representation for each place image, most approaches typically focus on the aggregation of deep features extracted from a backbone through using current prominent architectures (e.g., CNNs, MLPs, pooling layer and transformer encoder), giving little attention to the transformer decoder. However, we argue that its strong capability in capturing contextual dependencies and generating accurate features holds considerable potential for the VPR task. To this end, we propose an Efficient Decoder Transformer (EDTformer) for feature aggregation, which consists of several stacked simplified decoder blocks followed by two linear layers to directly generate robust and discriminative global representations for VPR. Specifically, we do this by formulating deep features as the keys and values, as well as a set of independent learnable parameters as the queries. EDTformer can fully utilize the contextual information within deep features, then gradually decode and aggregate the effective features into the learnable queries to form the final global representations. Moreover, to provide powerful deep features for EDTformer and further facilitate the robustness, we use the foundation model DINOv2 as the backbone and propose a Low-Rank Parallel Adaptation (LoPA) method to enhance it, which can refine the intermediate features of the backbone progressively in a memory- and parameter-efficient way. As a result, our method not only outperforms single-stage VPR methods on multiple benchmark datasets, but also outperforms two-stage VPR methods which add a re-ranking with considerable cost. Code will be available at https://github.com/Tong-Jin01/EDTformer.
CauseJudger: Identifying the Cause with LLMs for Abductive Logical Reasoning
Sep 09, 2024



Large language models (LLMs) have been utilized in solving diverse reasoning tasks, encompassing common sense, arithmetic and deduction tasks. However, with difficulties of reversing thinking patterns and irrelevant premises, how to determine the authenticity of the cause in abductive logical reasoning remains underexplored. Inspired by hypothesis and verification method and identification of irrelevant information in human thinking process, we propose a new framework for LLMs abductive logical reasoning called CauseJudger (CJ), which identifies the authenticity of possible cause by transforming thinking from reverse to forward and removing irrelevant information. In addition, we construct an abductive logical reasoning dataset for decision task called CauseLogics, which contains 200,000 tasks of varying reasoning lengths. Our experiments show the efficiency of CJ with overall experiments and ablation experiments as well as case studies on our dataset and reconstructed public dataset. Notably, CJ's implementation is efficient, requiring only two calls to LLM. Its impact is profound: when using gpt-3.5, CJ achieves a maximum correctness improvement of 41% compared to Zero-Shot-CoT. Moreover, with gpt-4, CJ attains an accuracy exceeding 90% across all datasets.
Emotional Conversation: Empowering Talking Faces with Cohesive Expression, Gaze and Pose Generation
Jun 12, 2024Vivid talking face generation holds immense potential applications across diverse multimedia domains, such as film and game production. While existing methods accurately synchronize lip movements with input audio, they typically ignore crucial alignments between emotion and facial cues, which include expression, gaze, and head pose. These alignments are indispensable for synthesizing realistic videos. To address these issues, we propose a two-stage audio-driven talking face generation framework that employs 3D facial landmarks as intermediate variables. This framework achieves collaborative alignment of expression, gaze, and pose with emotions through self-supervised learning. Specifically, we decompose this task into two key steps, namely speech-to-landmarks synthesis and landmarks-to-face generation. The first step focuses on simultaneously synthesizing emotionally aligned facial cues, including normalized landmarks that represent expressions, gaze, and head pose. These cues are subsequently reassembled into relocated facial landmarks. In the second step, these relocated landmarks are mapped to latent key points using self-supervised learning and then input into a pretrained model to create high-quality face images. Extensive experiments on the MEAD dataset demonstrate that our model significantly advances the state-of-the-art performance in both visual quality and emotional alignment.