 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZEST: Zero-shot Embodied Skill Transfer for Athletic Robot Control
Jan 30, 2026Achieving robust, human-like whole-body control on humanoid robots for agile, contact-rich behaviors remains a central challenge, demanding heavy per-skill engineering and a brittle process of tuning controllers. We introduce ZEST (Zero-shot Embodied Skill Transfer), a streamlined motion-imitation framework that trains policies via reinforcement learning from diverse sources -- high-fidelity motion capture, noisy monocular video, and non-physics-constrained animation -- and deploys them to hardware zero-shot. ZEST generalizes across behaviors and platforms while avoiding contact labels, reference or observation windows, state estimators, and extensive reward shaping. Its training pipeline combines adaptive sampling, which focuses training on difficult motion segments, and an automatic curriculum using a model-based assistive wrench, together enabling dynamic, long-horizon maneuvers. We further provide a procedure for selecting joint-level gains from approximate analytical armature values for closed-chain actuators, along with a refined model of actuators. Trained entirely in simulation with moderate domain randomization, ZEST demonstrates remarkable generality. On Boston Dynamics' Atlas humanoid, ZEST learns dynamic, multi-contact skills (e.g., army crawl, breakdancing) from motion capture. It transfers expressive dance and scene-interaction skills, such as box-climbing, directly from videos to Atlas and the Unitree G1. Furthermore, it extends across morphologies to the Spot quadruped, enabling acrobatics, such as a continuous backflip, through animation. Together, these results demonstrate robust zero-shot deployment across heterogeneous data sources and embodiments, establishing ZEST as a scalable interface between biological movements and their robotic counterparts.
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
Nov 06, 2025



We present Isaac Lab, the natural successor to Isaac Gym, which extends the paradigm of GPU-native robotics simulation into the era of large-scale multi-modal learning. Isaac Lab combines high-fidelity GPU parallel physics, photorealistic rendering, and a modular, composable architecture for designing environments and training robot policies. Beyond physics and rendering, the framework integrates actuator models, multi-frequency sensor simulation, data collection pipelines, and domain randomization tools, unifying best practices for reinforcement and imitation learning at scale within a single extensible platform. We highlight its application to a diverse set of challenges, including whole-body control, cross-embodiment mobility, contact-rich and dexterous manipulation, and the integration of human demonstrations for skill acquisition. Finally, we discuss upcoming integration with the differentiable, GPU-accelerated Newton physics engine, which promises new opportunities for scalable, data-efficient, and gradient-based approaches to robot learning. We believe Isaac Lab's combination of advanced simulation capabilities, rich sensing, and data-center scale execution will help unlock the next generation of breakthroughs in robotics research.
Learning coordinated badminton skills for legged manipulators
May 29, 2025Coordinating the motion between lower and upper limbs and aligning limb control with perception are substantial challenges in robotics, particularly in dynamic environments. To this end, we introduce an approach for enabling legged mobile manipulators to play badminton, a task that requires precise coordination of perception, locomotion, and arm swinging. We propose a unified reinforcement learning-based control policy for whole-body visuomotor skills involving all degrees of freedom to achieve effective shuttlecock tracking and striking. This policy is informed by a perception noise model that utilizes real-world camera data, allowing for consistent perception error levels between simulation and deployment and encouraging learned active perception behaviors. Our method includes a shuttlecock prediction model, constrained reinforcement learning for robust motion control, and integrated system identification techniques to enhance deployment readiness. Extensive experimental results in a variety of environments validate the robot's capability to predict shuttlecock trajectories, navigate the service area effectively, and execute precise strikes against human players, demonstrating the feasibility of using legged mobile manipulators in complex and dynamic sports scenarios.
* Science Robotics DOI: 10.1126/scirobotics.adu3922
High-Performance Reinforcement Learning on Spot: Optimizing Simulation Parameters with Distributional Measures
Apr 29, 2025This work presents an overview of the technical details behind a high performance reinforcement learning policy deployment with the Spot RL Researcher Development Kit for low level motor access on Boston Dynamics Spot. This represents the first public demonstration of an end to end end reinforcement learning policy deployed on Spot hardware with training code publicly available through Nvidia IsaacLab and deployment code available through Boston Dynamics. We utilize Wasserstein Distance and Maximum Mean Discrepancy to quantify the distributional dissimilarity of data collected on hardware and in simulation to measure our sim2real gap. We use these measures as a scoring function for the Covariance Matrix Adaptation Evolution Strategy to optimize simulated parameters that are unknown or difficult to measure from Spot. Our procedure for modeling and training produces high quality reinforcement learning policies capable of multiple gaits, including a flight phase. We deploy policies capable of over 5.2ms locomotion, more than triple Spots default controller maximum speed, robustness to slippery surfaces, disturbance rejection, and overall agility previously unseen on Spot. We detail our method and release our code to support future work on Spot with the low level API.
Diffuse-CLoC: Guided Diffusion for Physics-based Character Look-ahead Control
Mar 14, 2025We present Diffuse-CLoC, a guided diffusion framework for physics-based look-ahead control that enables intuitive, steerable, and physically realistic motion generation. While existing kinematics motion generation with diffusion models offer intuitive steering capabilities with inference-time conditioning, they often fail to produce physically viable motions. In contrast, recent diffusion-based control policies have shown promise in generating physically realizable motion sequences, but the lack of kinematics prediction limits their steerability. Diffuse-CLoC addresses these challenges through a key insight: modeling the joint distribution of states and actions within a single diffusion model makes action generation steerable by conditioning it on the predicted states. This approach allows us to leverage established conditioning techniques from kinematic motion generation while producing physically realistic motions. As a result, we achieve planning capabilities without the need for a high-level planner. Our method handles a diverse set of unseen long-horizon downstream tasks through a single pre-trained model, including static and dynamic obstacle avoidance, motion in-betweening, and task-space control. Experimental results show that our method significantly outperforms the traditional hierarchical framework of high-level motion diffusion and low-level tracking.
DTC: Deep Tracking Control -- A Unifying Approach to Model-Based Planning and Reinforcement-Learning for Versatile and Robust Locomotion
Sep 27, 2023Legged locomotion is a complex control problem that requires both accuracy and robustness to cope with real-world challenges. Legged systems have traditionally been controlled using trajectory optimization with inverse dynamics. Such hierarchical model-based methods are appealing due to intuitive cost function tuning, accurate planning, and most importantly, the insightful understanding gained from more than one decade of extensive research. However, model mismatch and violation of assumptions are common sources of faulty operation and may hinder successful sim-to-real transfer. Simulation-based reinforcement learning, on the other hand, results in locomotion policies with unprecedented robustness and recovery skills. Yet, all learning algorithms struggle with sparse rewards emerging from environments where valid footholds are rare, such as gaps or stepping stones. In this work, we propose a hybrid control architecture that combines the advantages of both worlds to simultaneously achieve greater robustness, foot-placement accuracy, and terrain generalization. Our approach utilizes a model-based planner to roll out a reference motion during training. A deep neural network policy is trained in simulation, aiming to track the optimized footholds. We evaluate the accuracy of our locomotion pipeline on sparse terrains, where pure data-driven methods are prone to fail. Furthermore, we demonstrate superior robustness in the presence of slippery or deformable ground when compared to model-based counterparts. Finally, we show that our proposed tracking controller generalizes across different trajectory optimization methods not seen during training. In conclusion, our work unites the predictive capabilities and optimality guarantees of online planning with the inherent robustness attributed to offline learning.
Versatile Multi-Contact Planning and Control for Legged Loco-Manipulation
Aug 17, 2023Loco-manipulation planning skills are pivotal for expanding the utility of robots in everyday environments. These skills can be assessed based on a system's ability to coordinate complex holistic movements and multiple contact interactions when solving different tasks. However, existing approaches have been merely able to shape such behaviors with hand-crafted state machines, densely engineered rewards, or pre-recorded expert demonstrations. Here, we propose a minimally-guided framework that automatically discovers whole-body trajectories jointly with contact schedules for solving general loco-manipulation tasks in pre-modeled environments. The key insight is that multi-modal problems of this nature can be formulated and treated within the context of integrated Task and Motion Planning (TAMP). An effective bilevel search strategy is achieved by incorporating domain-specific rules and adequately combining the strengths of different planning techniques: trajectory optimization and informed graph search coupled with sampling-based planning. We showcase emergent behaviors for a quadrupedal mobile manipulator exploiting both prehensile and non-prehensile interactions to perform real-world tasks such as opening/closing heavy dishwashers and traversing spring-loaded doors. These behaviors are also deployed on the real system using a two-layer whole-body tracking controller.
Learning Arm-Assisted Fall Damage Reduction and Recovery for Legged Mobile Manipulators
Mar 09, 2023Adaptive falling and recovery skills greatly extend the applicability of robot deployments. In the case of legged mobile manipulators, the robot arm could adaptively stop the fall and assist the recovery. Prior works on falling and recovery strategies for legged mobile manipulators usually rely on assumptions such as inelastic collisions and falling in defined directions to enable real-time computation. This paper presents a learning-based approach to reducing fall damage and recovery. An asymmetric actor-critic training structure is used to train a time-invariant policy with time-varying reward functions. In simulated experiments, the policy recovers from 98.9\% of initial falling configurations. It reduces base contact impulse, peak joint internal forces, and base acceleration during the fall compared to the baseline methods. The trained control policy is deployed and extensively tested on the ALMA robot hardware. A video summarizing the proposed method and the hardware tests is available at https://youtu.be/avwg2HqGi8s.
Bayesian Multi-Task Learning MPC for Robotic Mobile Manipulation
Nov 18, 2022



Mobile manipulation in robotics is challenging due to the need of solving many diverse tasks, such as opening a door or picking-and-placing an object. Typically, a basic first-principles system description of the robot is available, thus motivating the use of model-based controllers. However, the robot dynamics and its interaction with an object are affected by uncertainty, limiting the controller's performance. To tackle this problem, we propose a Bayesian multi-task learning model that uses trigonometric basis functions to identify the error in the dynamics. In this way, data from different but related tasks can be leveraged to provide a descriptive error model that can be efficiently updated online for new, unseen tasks. We combine this learning scheme with a model predictive controller, and extensively test the effectiveness of the proposed approach, including comparisons with available baseline controllers. We present simulation tests with a ball-balancing robot, and door-opening hardware experiments with a quadrupedal manipulator.
Perceptive Locomotion through Nonlinear Model Predictive Control
Aug 17, 2022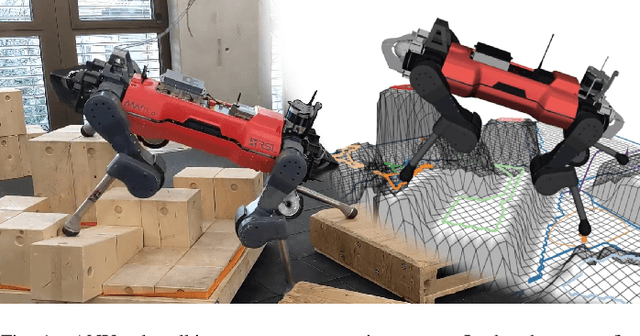

Dynamic locomotion in rough terrain requires accurate foot placement, collision avoidance, and planning of the underactuated dynamics of the system. Reliably optimizing for such motions and interactions in the presence of imperfect and often incomplete perceptive information is challenging. We present a complete perception, planning, and control pipeline, that can optimize motions for all degrees of freedom of the robot in real-time. To mitigate the numerical challenges posed by the terrain a sequence of convex inequality constraints is extracted as local approximations of foothold feasibility and embedded into an online model predictive controller. Steppability classification, plane segmentation, and a signed distance field are precomputed per elevation map to minimize the computational effort during the optimization. A combination of multiple-shooting, real-time iteration, and a filter-based line-search are used to solve the formulated problem reliably and at high rate. We validate the proposed method in scenarios with gaps, slopes, and stepping stones in simulation and experimentally on the ANYmal quadruped platform, resulting in state-of-the-art dynamic climbing.