 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefAerial: A Benchmark and Approach for Referring Detection in Aerial Images
Apr 22, 2026Referring detection refers to locate the target referred by natural languages, which has recently attracted growing research interests. However, existing datasets are limited to ground images with large object centered in relative small scenes. This paper introduces a large-scale challenging dataset for referring detection in aerial images, termed as RefAerial. It distinguishes from conventional ground referring detection datasets by 4 characteristics: (1) low but diverse object-to-scene ratios, (2) numerous targets and distractors, (3)complex and fine-grained referring descriptions, (4) diverse and broad scenes in the aerial view. We also develop a human-in-the-loop referring expansion and annotation engine (REA-Engine) for efficient semi-automated referring pair annotation. Besides, we observe that existing ground referring detection approaches exhibiting serious performance degradation on our aerial dataset since the intrinsic scale variety issue within or across aerial images. Therefore, we further propose a novel scale-comprehensive and sensitive (SCS) framework for referring detection in aerial images. It consists of a mixture-of-granularity (MoG) attention and a two-stage comprehensive-to-sensitive (CtS) decoding strategy. Specifically, the mixture-of-granularity attention is developed for scale-comprehensive target understanding. In addition, the two-stage comprehensive-to-sensitive decoding strategy is designed for coarse-to-fine referring target decoding. Eventually, the proposed SCS framework achieves remarkable performance on our aerial referring detection dataset and even promising performance boost on conventional ground referring detection datasets.
UniPINN: A Unified PINN Framework for Multi-task Learning of Diverse Navier-Stokes Equations
Mar 11, 2026Physics-Informed Neural Networks (PINNs) have shown promise in solving incompressible Navier-Stokes equations, yet existing approaches are predominantly designed for single-flow settings. When extended to multi-flow scenarios, these methods face three key challenges: (1) difficulty in simultaneously capturing both shared physical principles and flow-specific characteristics, (2) susceptibility to inter-task negative transfer that degrades prediction accuracy, and (3) unstable training dynamics caused by disparate loss magnitudes across heterogeneous flow regimes. To address these limitations, we propose UniPINN, a unified multi-flow PINN framework that integrates three complementary components: a shared-specialized architecture that disentangles universal physical laws from flow-specific features, a cross-flow attention mechanism that selectively reinforces relevant patterns while suppressing task-irrelevant interference, and a dynamic weight allocation strategy that adaptively balances loss contributions to stabilize multi-objective optimization. Extensive experiments on three canonical flows demonstrate that UniPINN effectively unifies multi-flow learning, achieving superior prediction accuracy and balanced performance across heterogeneous regimes while successfully mitigating negative transfer. The source code of this paper will be released on https://github.com/Event-AHU/OpenFusion
Structure and Progress Aware Diffusion for Medical Image Segmentation
Mar 09, 2026Medical image segmentation is crucial for computer-aided diagnosis, which necessitates understanding both coarse morphological and semantic structures, as well as carving fine boundaries. The morphological and semantic structures in medical images are beneficial and stable clues for target understanding. While the fine boundaries of medical targets (like tumors and lesions) are usually ambiguous and noisy since lesion overlap, annotation uncertainty, and so on, making it not reliable to serve as early supervision. However, existing methods simultaneously learn coarse structures and fine boundaries throughout the training process. In this paper, we propose a structure and progress-aware diffusion (SPAD) for medical image segmentation, which consists of a semantic-concentrated diffusion (ScD) and a boundary-centralized diffusion (BcD) modulated by a progress-aware scheduler (PaS). Specifically, the semantic-concentrated diffusion introduces anchor-preserved target perturbation, which perturbs pixels within a medical target but preserves unaltered areas as semantic anchors, encouraging the model to infer noisy target areas from the surrounding semantic context. The boundary-centralized diffusion introduces progress-aware boundary noise, which blurs unreliable and ambiguous boundaries, thus compelling the model to focus on coarse but stable anatomical morphology and global semantics. Furthermore, the progress-aware scheduler gradually modulates noise intensity of the ScD and BcD forming a coarse-to-fine diffusion paradigm, which encourage focusing on coarse morphological and semantic structures during early target understanding stages and gradually shifting to fine target boundaries during later contour adjusting stages.
NESTOR: A Nested MOE-based Neural Operator for Large-Scale PDE Pre-Training
Feb 25, 2026Neural operators have emerged as an efficient paradigm for solving PDEs, overcoming the limitations of traditional numerical methods and significantly improving computational efficiency. However, due to the diversity and complexity of PDE systems, existing neural operators typically rely on a single network architecture, which limits their capacity to fully capture heterogeneous features and complex system dependencies. This constraint poses a bottleneck for large-scale PDE pre-training based on neural operators. To address these challenges, we propose a large-scale PDE pre-trained neural operator based on a nested Mixture-of-Experts (MoE) framework. In particular, the image-level MoE is designed to capture global dependencies, while the token-level Sub-MoE focuses on local dependencies. Our model can selectively activate the most suitable expert networks for a given input, thereby enhancing generalization and transferability. We conduct large-scale pre-training on twelve PDE datasets from diverse sources and successfully transfer the model to downstream tasks. Extensive experiments demonstrate the effectiveness of our approach.
Fully Automated SAM for Single-source Domain Generalization in Medical Image Segmentation
Jul 23, 2025Although SAM-based single-source domain generalization models for medical image segmentation can mitigate the impact of domain shift on the model in cross-domain scenarios, these models still face two major challenges. First, the segmentation of SAM is highly dependent on domain-specific expert-annotated prompts, which prevents SAM from achieving fully automated medical image segmentation and therefore limits its application in clinical settings. Second, providing poor prompts (such as bounding boxes that are too small or too large) to the SAM prompt encoder can mislead SAM into generating incorrect mask results. Therefore, we propose the FA-SAM, a single-source domain generalization framework for medical image segmentation that achieves fully automated SAM. FA-SAM introduces two key innovations: an Auto-prompted Generation Model (AGM) branch equipped with a Shallow Feature Uncertainty Modeling (SUFM) module, and an Image-Prompt Embedding Fusion (IPEF) module integrated into the SAM mask decoder. Specifically, AGM models the uncertainty distribution of shallow features through the SUFM module to generate bounding box prompts for the target domain, enabling fully automated segmentation with SAM. The IPEF module integrates multiscale information from SAM image embeddings and prompt embeddings to capture global and local details of the target object, enabling SAM to mitigate the impact of poor prompts. Extensive experiments on publicly available prostate and fundus vessel datasets validate the effectiveness of FA-SAM and highlight its potential to address the above challenges.
Correlative and Discriminative Label Grouping for Multi-Label Visual Prompt Tuning
Apr 14, 2025Modeling label correlations has always played a pivotal role in multi-label image classification (MLC), attracting significant attention from researchers. However, recent studies have overemphasized co-occurrence relationships among labels, which can lead to overfitting risk on this overemphasis, resulting in suboptimal models. To tackle this problem, we advocate for balancing correlative and discriminative relationships among labels to mitigate the risk of overfitting and enhance model performance. To this end, we propose the Multi-Label Visual Prompt Tuning framework, a novel and parameter-efficient method that groups classes into multiple class subsets according to label co-occurrence and mutual exclusivity relationships, and then models them respectively to balance the two relationships. In this work, since each group contains multiple classes, multiple prompt tokens are adopted within Vision Transformer (ViT) to capture the correlation or discriminative label relationship within each group, and effectively learn correlation or discriminative representations for class subsets. On the other hand, each group contains multiple group-aware visual representations that may correspond to multiple classes, and the mixture of experts (MoE) model can cleverly assign them from the group-aware to the label-aware, adaptively obtaining label-aware representation, which is more conducive to classification. Experiments on multiple benchmark datasets show that our proposed approach achieves competitive results and outperforms SOTA methods on multiple pre-trained models.
Bidirectional Uncertainty-Aware Region Learning for Semi-Supervised Medical Image Segmentation
Feb 11, 2025



In semi-supervised medical image segmentation, the poor quality of unlabeled data and the uncertainty in the model's predictions lead to models that inevitably produce erroneous pseudo-labels. These errors accumulate throughout model training, thereby weakening the model's performance. We found that these erroneous pseudo-labels are typically concentrated in high-uncertainty regions. Traditional methods improve performance by directly discarding pseudo-labels in these regions, but this can also result in neglecting potentially valuable training data. To alleviate this problem, we propose a bidirectional uncertainty-aware region learning strategy. In training labeled data, we focus on high-uncertainty regions, using precise label information to guide the model's learning in potentially uncontrollable areas. Meanwhile, in the training of unlabeled data, we concentrate on low-uncertainty regions to reduce the interference of erroneous pseudo-labels on the model. Through this bidirectional learning strategy, the model's overall performance has significantly improved. Extensive experiments show that our proposed method achieves significant performance improvement on different medical image segmentation tasks.
XiHeFusion: Harnessing Large Language Models for Science Communication in Nuclear Fusion
Feb 08, 2025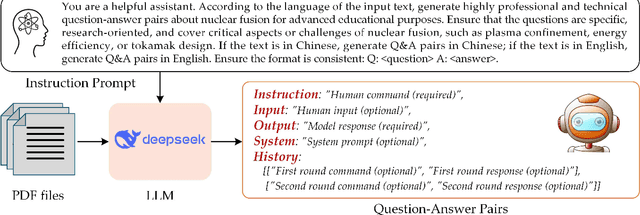
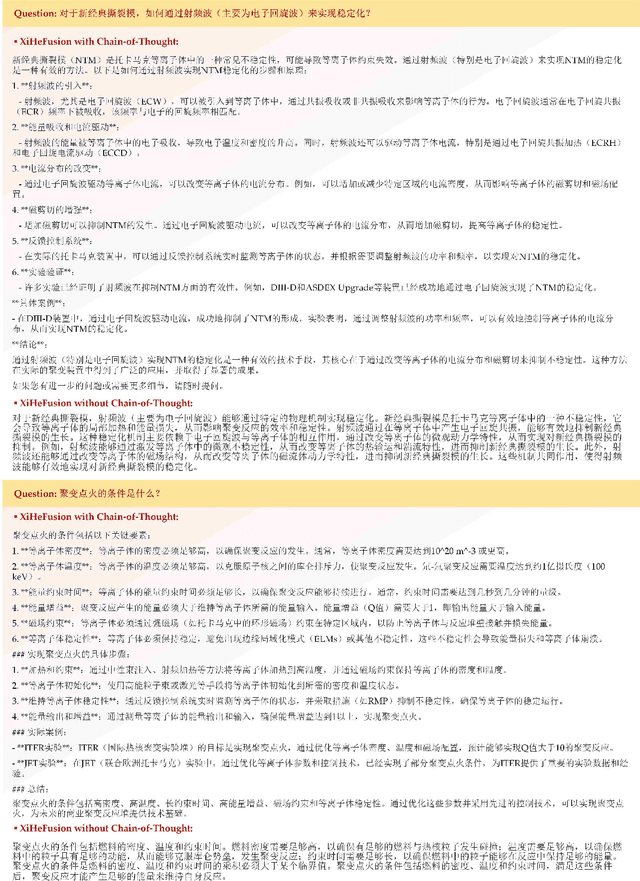
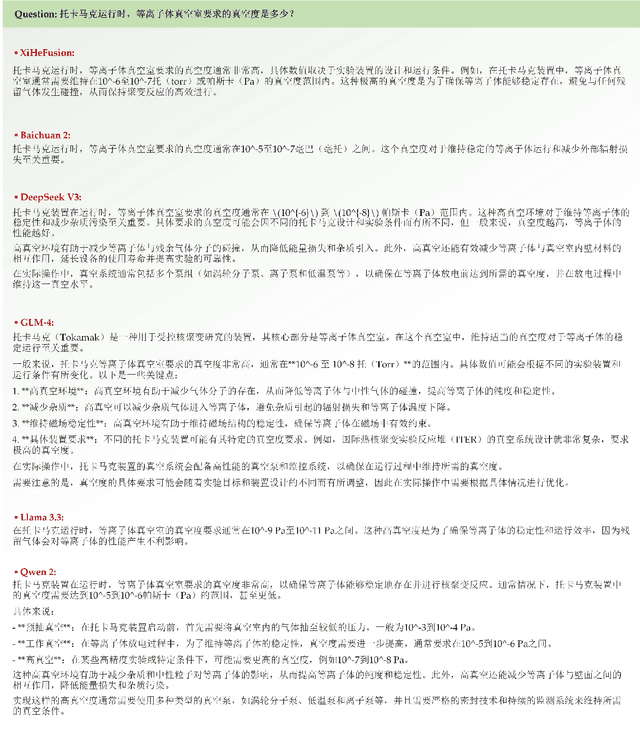
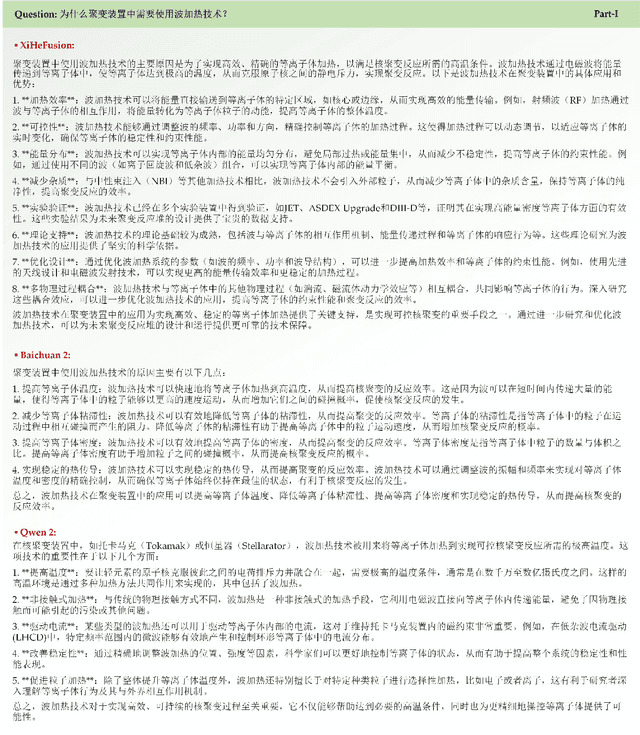
Nuclear fusion is one of the most promising ways for humans to obtain infinite energy. Currently, with the rapid development of artificial intelligence, the mission of nuclear fusion has also entered a critical period of its development. How to let more people to understand nuclear fusion and join in its research is one of the effective means to accelerate the implementation of fusion. This paper proposes the first large model in the field of nuclear fusion, XiHeFusion, which is obtained through supervised fine-tuning based on the open-source large model Qwen2.5-14B. We have collected multi-source knowledge about nuclear fusion tasks to support the training of this model, including the common crawl, eBooks, arXiv, dissertation, etc. After the model has mastered the knowledge of the nuclear fusion field, we further used the chain of thought to enhance its logical reasoning ability, making XiHeFusion able to provide more accurate and logical answers. In addition, we propose a test questionnaire containing 180+ questions to assess the conversational ability of this science popularization large model. Extensive experimental results show that our nuclear fusion dialogue model, XiHeFusion, can perform well in answering science popularization knowledge. The pre-trained XiHeFusion model is released on https://github.com/Event-AHU/XiHeFusion.
Domain Adaptive Lung Nodule Detection in X-ray Image
Jul 28, 2024Medical images from different healthcare centers exhibit varied data distributions, posing significant challenges for adapting lung nodule detection due to the domain shift between training and application phases. Traditional unsupervised domain adaptive detection methods often struggle with this shift, leading to suboptimal outcomes. To overcome these challenges, we introduce a novel domain adaptive approach for lung nodule detection that leverages mean teacher self-training and contrastive learning. First, we propose a hierarchical contrastive learning strategy to refine nodule representations and enhance the distinction between nodules and background. Second, we introduce a nodule-level domain-invariant feature learning (NDL) module to capture domain-invariant features through adversarial learning across different domains. Additionally, we propose a new annotated dataset of X-ray images to aid in advancing lung nodule detection research. Extensive experiments conducted on multiple X-ray datasets demonstrate the efficacy of our approach in mitigating domain shift impacts.
Text-Region Matching for Multi-Label Image Recognition with Missing Labels
Jul 26, 2024



Recently, large-scale visual language pre-trained (VLP) models have demonstrated impressive performance across various downstream tasks. Motivated by these advancements, pioneering efforts have emerged in multi-label image recognition with missing labels, leveraging VLP prompt-tuning technology. However, they usually cannot match text and vision features well, due to complicated semantics gaps and missing labels in a multi-label image. To tackle this challenge, we propose \textbf{T}ext-\textbf{R}egion \textbf{M}atching for optimizing \textbf{M}ulti-\textbf{L}abel prompt tuning, namely TRM-ML, a novel method for enhancing meaningful cross-modal matching. Compared to existing methods, we advocate exploring the information of category-aware regions rather than the entire image or pixels, which contributes to bridging the semantic gap between textual and visual representations in a one-to-one matching manner. Concurrently, we further introduce multimodal contrastive learning to narrow the semantic gap between textual and visual modalities and establish intra-class and inter-class relationships. Additionally, to deal with missing labels, we propose a multimodal category prototype that leverages intra- and inter-category semantic relationships to estimate unknown labels, facilitating pseudo-label generation. Extensive experiments on the MS-COCO, PASCAL VOC, Visual Genome, NUS-WIDE, and CUB-200-211 benchmark datasets demonstrate that our proposed framework outperforms the state-of-the-art methods by a significant margin. Our code is available here\href{https://github.com/yu-gi-oh-leilei/TRM-ML}{\raisebox{-1pt}{\faGithub}}.