 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Option Discovery Algorithms
Jul 26, 2018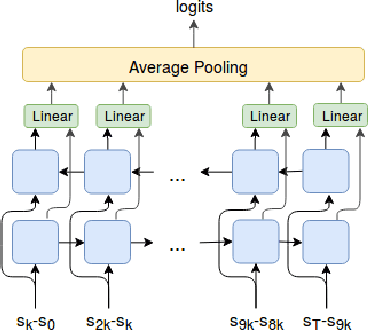
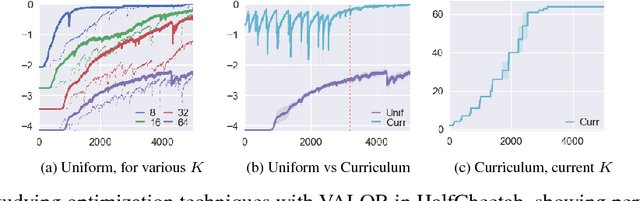
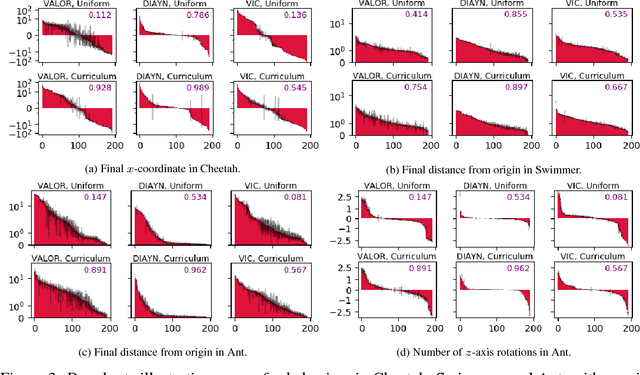
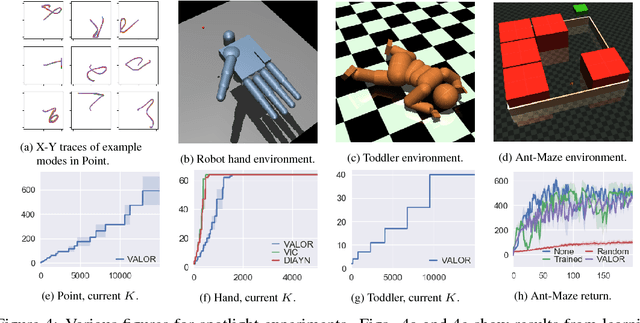
We explore methods for option discovery based on variational inference and make two algorithmic contributions. First: we highlight a tight connection between variational option discovery methods and variational autoencoders, and introduce Variational Autoencoding Learning of Options by Reinforcement (VALOR), a new method derived from the connection. In VALOR, the policy encodes contexts from a noise distribution into trajectories, and the decoder recovers the contexts from the complete trajectories. Second: we propose a curriculum learning approach where the number of contexts seen by the agent increases whenever the agent's performance is strong enough (as measured by the decoder) on the current set of contexts. We show that this simple trick stabilizes training for VALOR and prior variational option discovery methods, allowing a single agent to learn many more modes of behavior than it could with a fixed context distribution. Finally, we investigate other topics related to variational option discovery, including fundamental limitations of the general approach and the applicability of learned options to downstream tasks.
The Malicious Use of Artificial Intelligence: Forecasting, Prevention, and Mitigation
Feb 20, 2018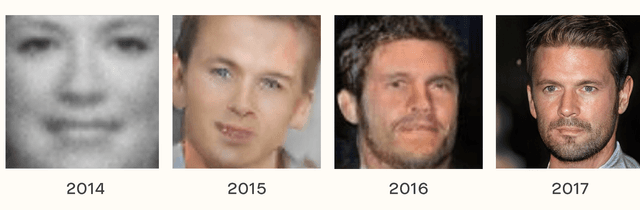
This report surveys the landscape of potential security threats from malicious uses of AI, and proposes ways to better forecast, prevent, and mitigate these threats. After analyzing the ways in which AI may influence the threat landscape in the digital, physical, and political domains, we make four high-level recommendations for AI researchers and other stakeholders. We also suggest several promising areas for further research that could expand the portfolio of defenses, or make attacks less effective or harder to execute. Finally, we discuss, but do not conclusively resolve, the long-term equilibrium of attackers and defenders.
Deep reinforcement learning from human preferences
Jul 13, 2017
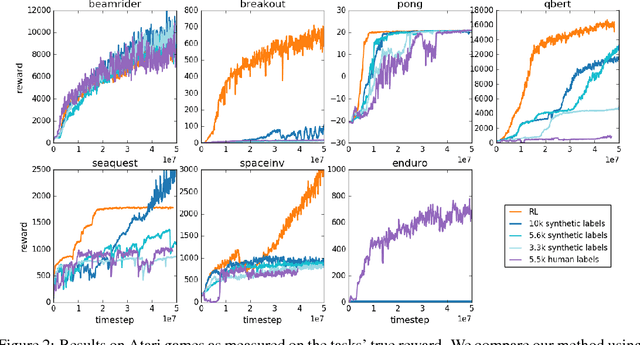
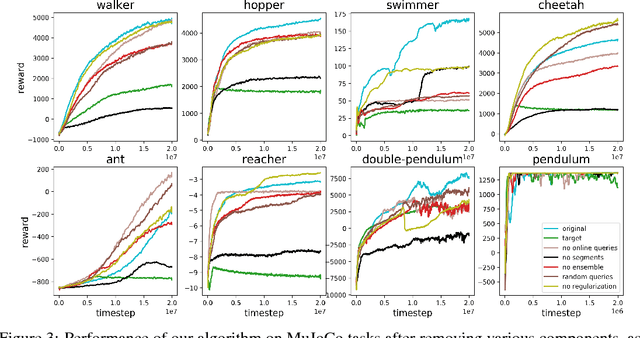

For sophisticated reinforcement learning (RL) systems to interact usefully with real-world environments, we need to communicate complex goals to these systems. In this work, we explore goals defined in terms of (non-expert) human preferences between pairs of trajectory segments. We show that this approach can effectively solve complex RL tasks without access to the reward function, including Atari games and simulated robot locomotion, while providing feedback on less than one percent of our agent's interactions with the environment. This reduces the cost of human oversight far enough that it can be practically applied to state-of-the-art RL systems. To demonstrate the flexibility of our approach, we show that we can successfully train complex novel behaviors with about an hour of human time. These behaviors and environments are considerably more complex than any that have been previously learned from human feedback.
Learning a Natural Language Interface with Neural Programmer
Mar 02, 2017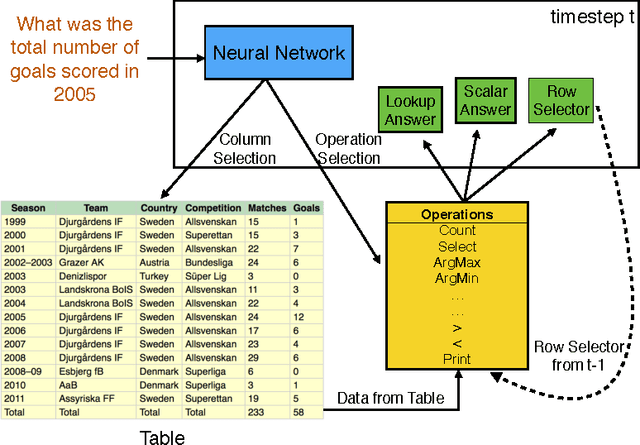
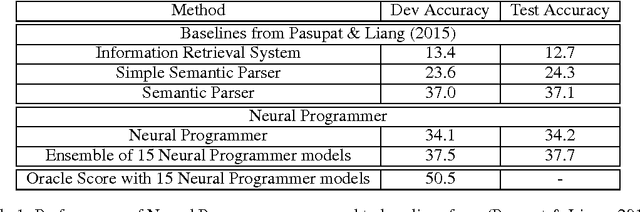
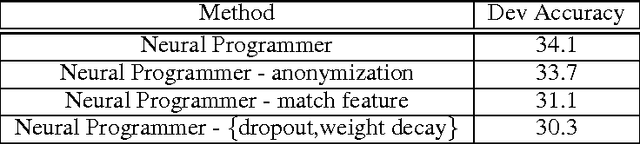
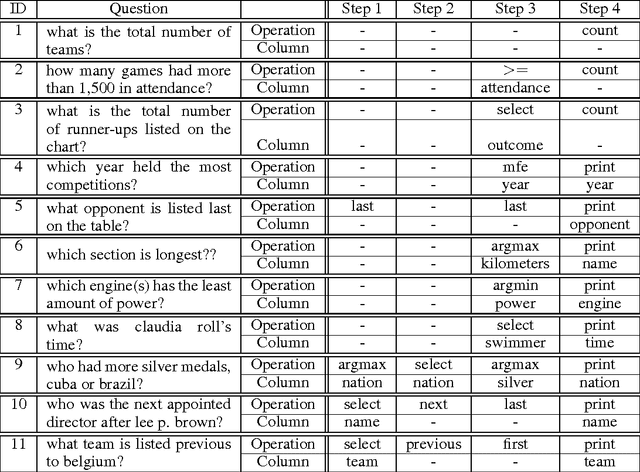
Learning a natural language interface for database tables is a challenging task that involves deep language understanding and multi-step reasoning. The task is often approached by mapping natural language queries to logical forms or programs that provide the desired response when executed on the database. To our knowledge, this paper presents the first weakly supervised, end-to-end neural network model to induce such programs on a real-world dataset. We enhance the objective function of Neural Programmer, a neural network with built-in discrete operations, and apply it on WikiTableQuestions, a natural language question-answering dataset. The model is trained end-to-end with weak supervision of question-answer pairs, and does not require domain-specific grammars, rules, or annotations that are key elements in previous approaches to program induction. The main experimental result in this paper is that a single Neural Programmer model achieves 34.2% accuracy using only 10,000 examples with weak supervision. An ensemble of 15 models, with a trivial combination technique, achieves 37.7% accuracy, which is competitive to the current state-of-the-art accuracy of 37.1% obtained by a traditional natural language semantic parser.
Concrete Problems in AI Safety
Jul 25, 2016Rapid progress in machine learning and artificial intelligence (AI) has brought increasing attention to the potential impacts of AI technologies on society. In this paper we discuss one such potential impact: the problem of accidents in machine learning systems, defined as unintended and harmful behavior that may emerge from poor design of real-world AI systems. We present a list of five practical research problems related to accident risk, categorized according to whether the problem originates from having the wrong objective function ("avoiding side effects" and "avoiding reward hacking"), an objective function that is too expensive to evaluate frequently ("scalable supervision"), or undesirable behavior during the learning process ("safe exploration" and "distributional shift"). We review previous work in these areas as well as suggesting research directions with a focus on relevance to cutting-edge AI systems. Finally, we consider the high-level question of how to think most productively about the safety of forward-looking applications of AI.
Deep Speech 2: End-to-End Speech Recognition in English and Mandarin
Dec 08, 2015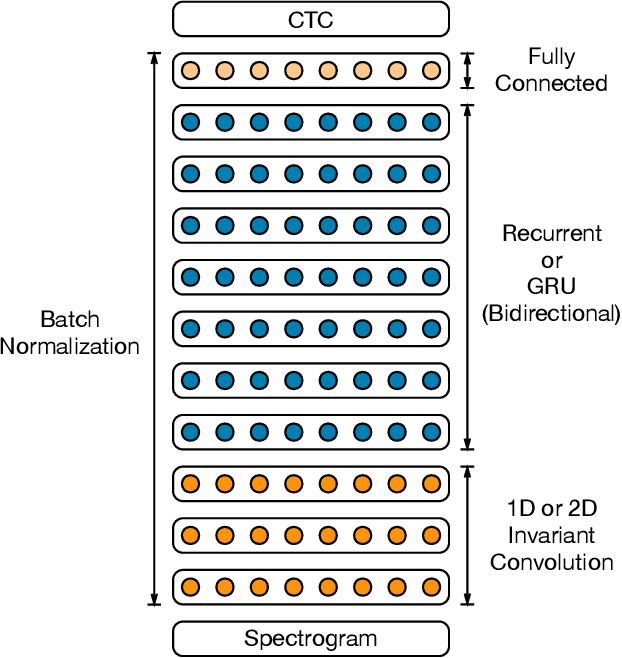
We show that an end-to-end deep learning approach can be used to recognize either English or Mandarin Chinese speech--two vastly different languages. Because it replaces entire pipelines of hand-engineered components with neural networks, end-to-end learning allows us to handle a diverse variety of speech including noisy environments, accents and different languages. Key to our approach is our application of HPC techniques, resulting in a 7x speedup over our previous system. Because of this efficiency, experiments that previously took weeks now run in days. This enables us to iterate more quickly to identify superior architectures and algorithms. As a result, in several cases, our system is competitive with the transcription of human workers when benchmarked on standard datasets. Finally, using a technique called Batch Dispatch with GPUs in the data center, we show that our system can be inexpensively deployed in an online setting, delivering low latency when serving users at scale.