 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared Control of Robot-Robot Collaborative Lifting with Agent Postural and Force Ergonomic Optimization
Apr 28, 2021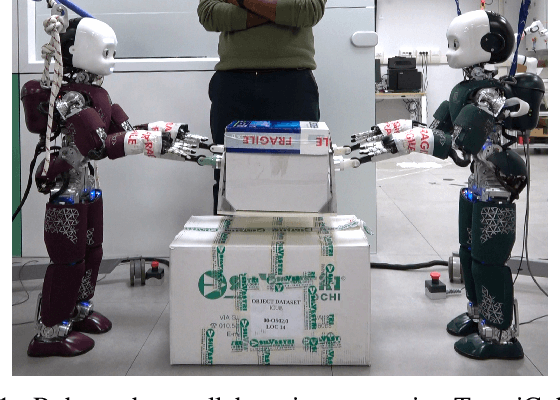
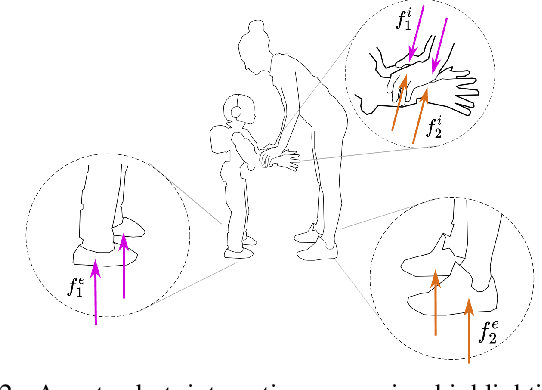
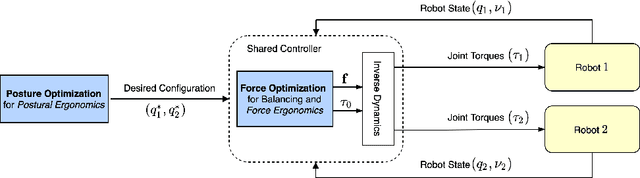
Humans show specialized strategies for efficient collaboration. Transferring similar strategies to humanoid robots can improve their capability to interact with other agents, leading the way to complex collaborative scenarios with multiple agents acting on a shared environment. In this paper we present a control framework for robot-robot collaborative lifting. The proposed shared controller takes into account the joint action of both the robots thanks to a centralized controller that communicates with them, and solves the whole-system optimization. Efficient collaboration is ensured by taking into account the ergonomic requirements of the robots through the optimization of posture and contact forces. The framework is validated in an experimental scenario with two iCub humanoid robots performing different payload lifting sequences.
A Plenum-Based Calibration Device for Tactile Sensor Arrays
Mar 23, 2021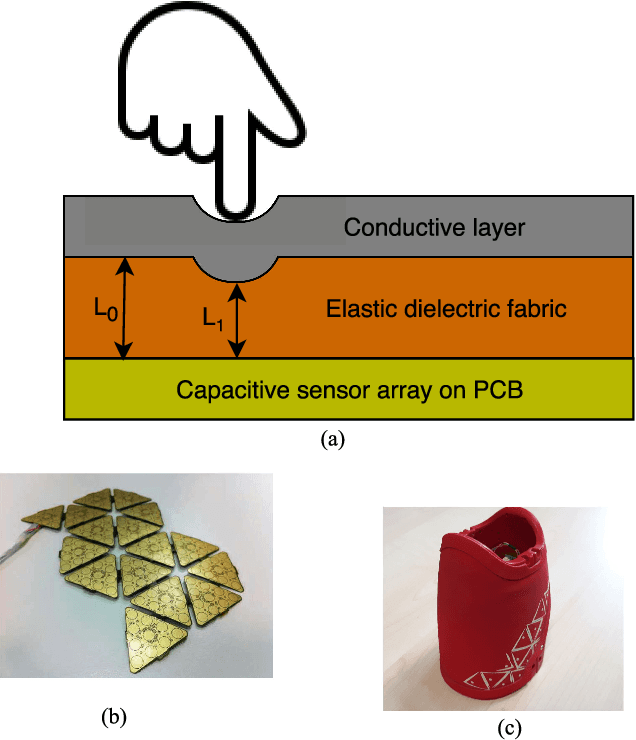
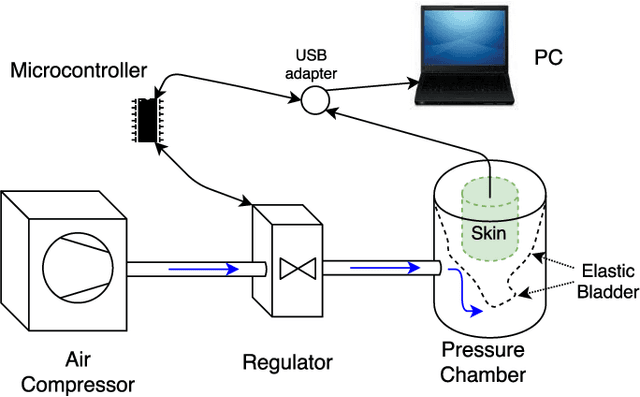
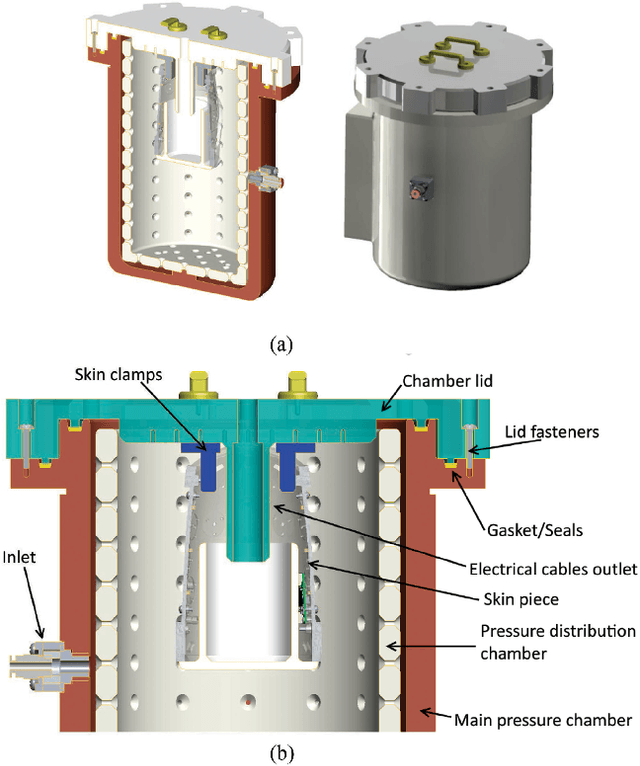
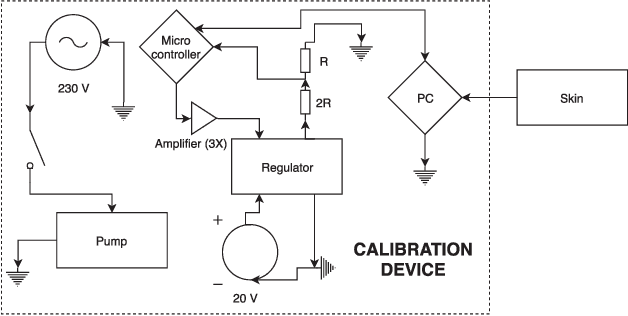
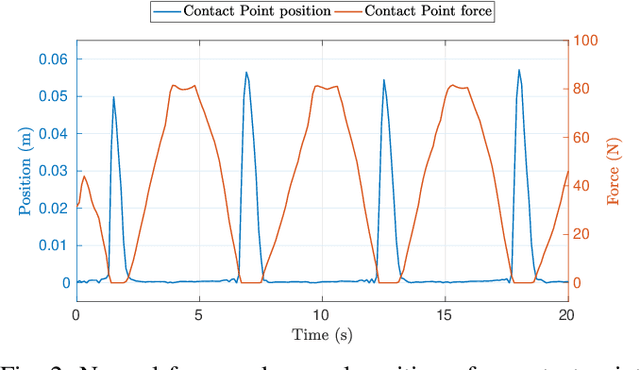
In modern robotic applications, tactile sensor arrays (i.e., artificial skins) are an emergent solution to determine the locations of contacts between a robot and an external agent. Localizing the point of contact is useful but determining the force applied on the skin provides many additional possibilities. This additional feature usually requires time-consuming calibration procedures to relate the sensor readings to the applied forces. This letter presents a novel device that enables the calibration of tactile sensor arrays in a fast and simple way. The key idea is to design a plenum chamber where the skin is inserted, and then the calibration of the tactile sensors is achieved by relating the air pressure and the sensor readings. This general concept is tested experimentally to calibrate the skin of the iCub robot. The validation of the calibration device is achieved by placing the masses of known weight on the artificial skin and comparing the applied force against the one estimated by the sensors.
* 8 pages, 18 figures
In Situ Translational Hand-Eye Calibration of Laser Profile Sensors using Arbitrary Objects
Mar 22, 2021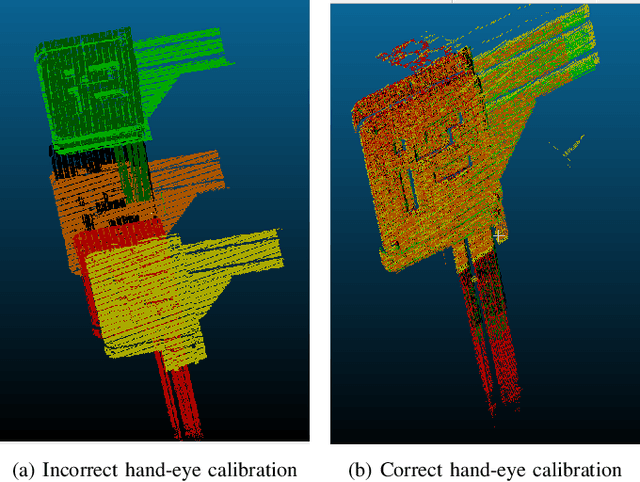
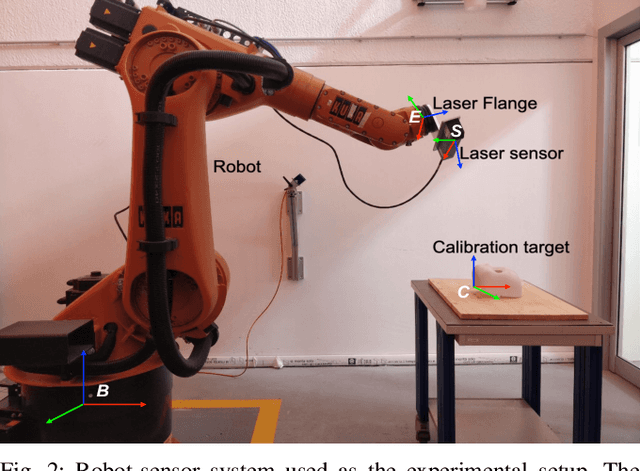

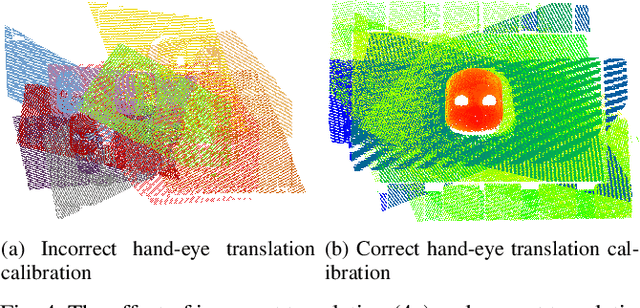
Hand-eye calibration of laser profile sensors is the process of extracting the homogeneous transformation between the laser profile sensor frame and the end-effector frame of a robot in order to express the data extracted by the sensor in the robot's global coordinate system. For laser profile scanners this is a challenging procedure, as they provide data only in two dimensions and state-of-the-art calibration procedures require the use of specialised calibration targets. This paper presents a novel method to extract the translation-part of the hand-eye calibration matrix with rotation-part known a priori in a target-agnostic way. Our methodology is applicable to any 2D image or 3D object as a calibration target and can also be performed in situ in the final application. The method is experimentally validated on a real robot-sensor setup with 2D and 3D targets.
Non-Linear Trajectory Optimization for Large Step-Ups: Application to the Humanoid Robot Atlas
Apr 25, 2020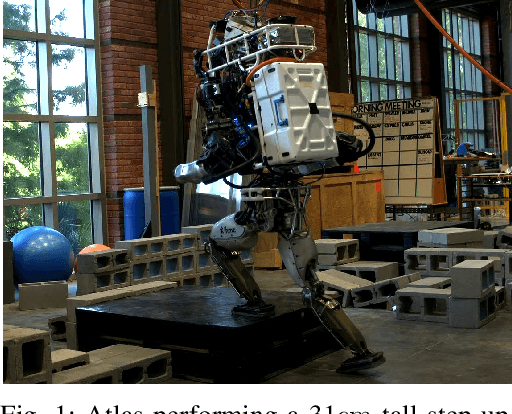
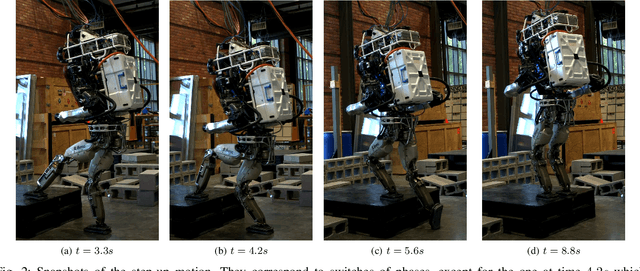
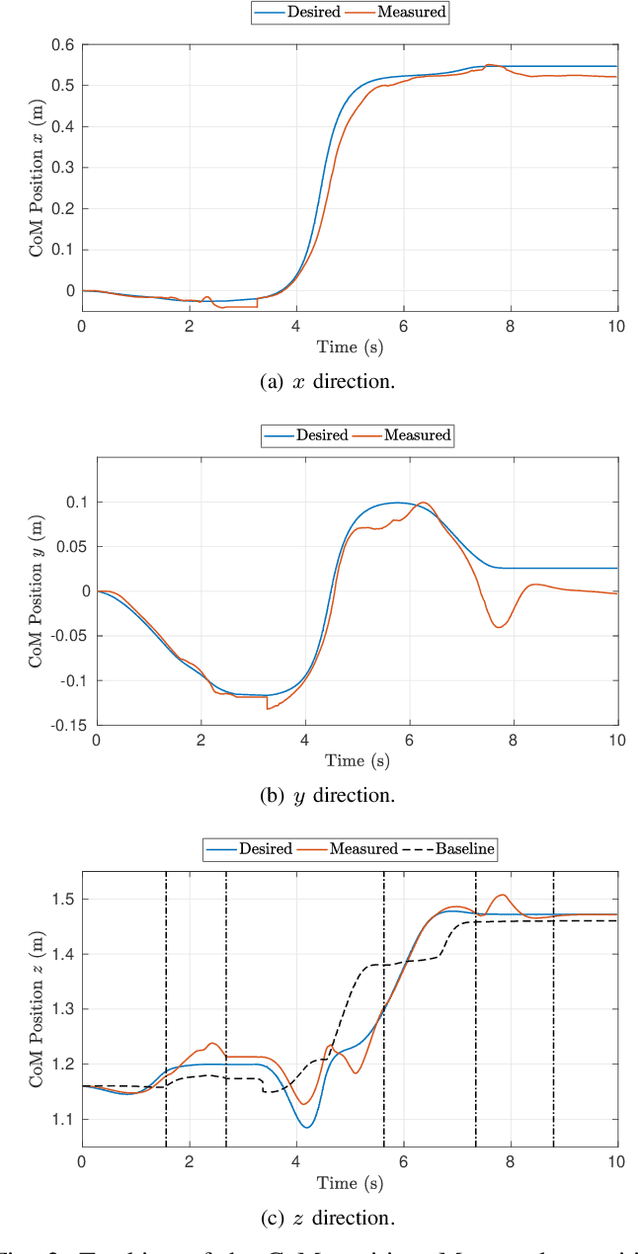
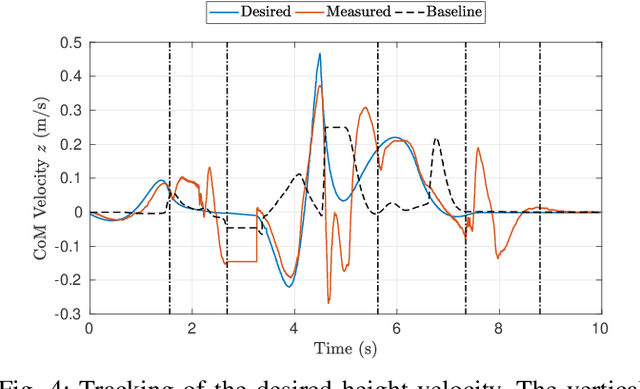
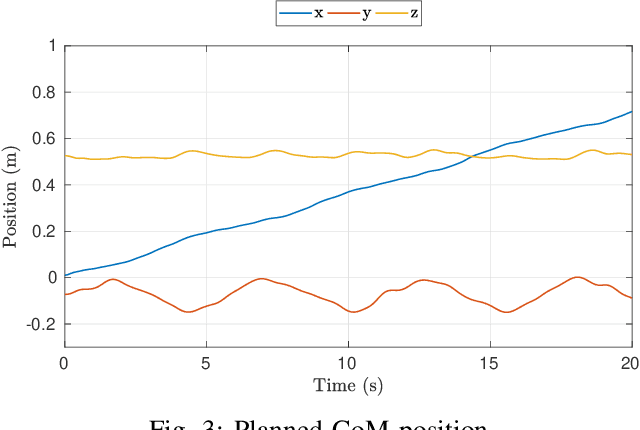
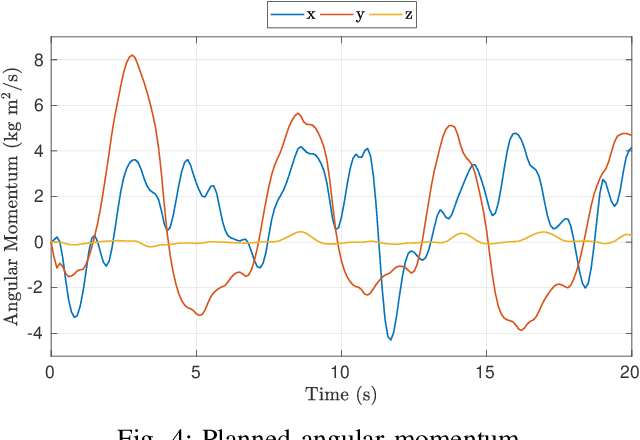
Performing large step-ups is a challenging task for a humanoid robot. It requires the robot to perform motions at the limit of its reachable workspace while straining to move its body upon the obstacle. This paper presents a non-linear trajectory optimization method for generating step-up motions. We adopt a simplified model of the centroidal dynamics to generate feasible Center of Mass trajectories aimed at reducing the torques required for the step-up motion. The activation and deactivation of contacts at both feet are considered explicitly. The output of the planner is a Center of Mass trajectory plus an optimal duration for each walking phase. These desired values are stabilized by a whole-body controller that determines a set of desired joint torques. We experimentally demonstrate that by using trajectory optimization techniques, the maximum torque required to the full-size humanoid robot Atlas can be reduced up to 20% when performing a step-up motion.
Whole-Body Walking Generation using Contact Parametrization: A Non-Linear Trajectory Optimization Approach
Mar 10, 2020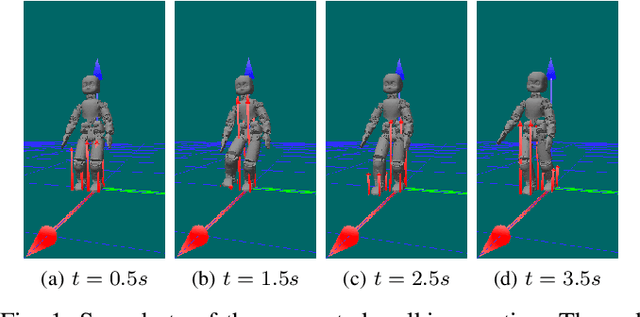
In this paper, we describe a planner capable of generating walking trajectories by using the centroidal dynamics and the full kinematics of a humanoid robot model. The interaction between the robot and the walking surface is modeled explicitly through a novel contact parametrization. The approach is complementarity-free and does not need a predefined contact sequence. By solving an optimal control problem we obtain walking trajectories. In particular, through a set of constraints and dynamic equations, we model the robot in contact with the ground. We describe the objective the robot needs to achieve with a set of tasks. The whole optimal control problem is transcribed into an optimization problem via a Direct Multiple Shooting approach and solved with an off-the-shelf solver. We show that it is possible to achieve walking motions automatically by specifying a minimal set of references, such as a constant desired Center of Mass velocity and a reference point on the ground.
Recent Advances in Human-Robot Collaboration Towards Joint Action
Jan 02, 2020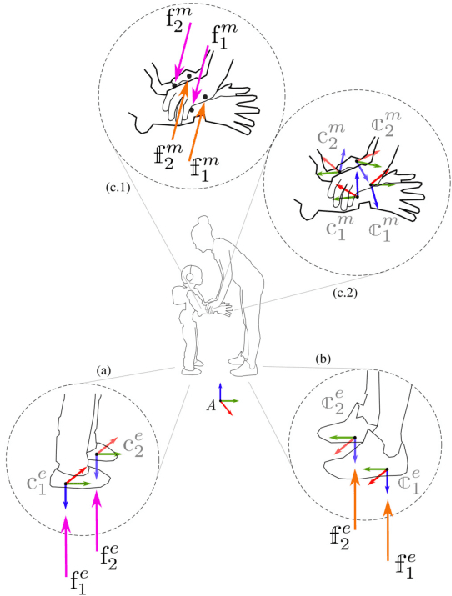

Robots existed as separate entities till now, but the horizons of a symbiotic human-robot partnership are impending. Despite all the recent technical advances in terms of hardware, robots are still not endowed with desirable relational skills that ensure a social component in their existence. This article draws from our experience as roboticists in Human-Robot Collaboration (HRC) with humanoid robots and presents some of the recent advances made towards realizing intuitive robot behaviors and partner-aware control involving physical interactions.
Gym-Ignition: Reproducible Robotic Simulations for Reinforcement Learning
Dec 02, 2019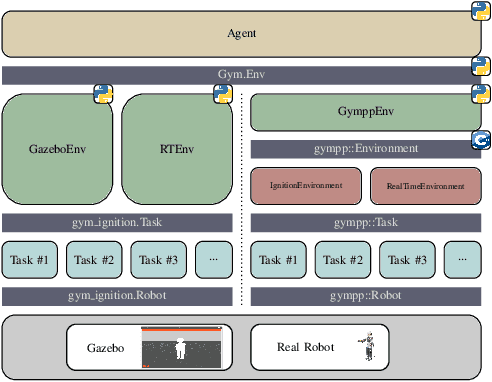
This paper presents Gym-Ignition, a new framework to create reproducible robotic environments for reinforcement learning research. It interfaces with the new generation of Gazebo, part of the Ignition Robotics suite, which provides three main improvements for reinforcement learning applications compared to the alternatives: 1) the modular architecture enables using the simulator as a C++ library, simplifying the interconnection with external software; 2) multiple physics and rendering engines are supported as plugins, simplifying their selection during the execution; 3) the new distributed simulation capability allows simulating complex scenarios while sharing the load on multiple workers and machines. The core of Gym-Ignition is a component that contains the Ignition Gazebo simulator and exposes a simple interface for its configuration and execution. We provide a Python package that allows developers to create robotic environments simulated in Ignition Gazebo. Environments expose the common OpenAI Gym interface, making them compatible out-of-the-box with third-party frameworks containing reinforcement learning algorithms. Simulations can be executed in both headless and GUI mode, the physics engine can run in accelerated mode, and instances can be parallelized. Furthermore, the Gym-Ignition software architecture provides abstraction of the Robot and the Task, making environments agnostic on the specific runtime. This abstraction allows their execution also in a real-time setting on actual robotic platforms, even if driven by different middlewares.
A Benchmarking of DCM Based Architectures for Position, Velocity and Torque Controlled Humanoid Robots
Nov 27, 2019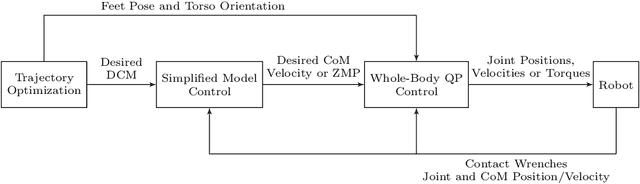


This paper contributes towards the benchmarking of control architectures for bipedal robot locomotion. It considers architectures that are based on the Divergent Component of Motion (DCM) and composed of three main layers: trajectory optimization, simplified model control, and whole-body QP control layer. While the first two layers use simplified robot models, the whole-body QP control layer uses a complete robot model to produce either desired positions, velocities, or torques inputs at the joint-level. This paper then compares two implementations of the simplified model control layer, which are tested with position, velocity, and torque control modes for the whole-body QP control layer. In particular, both an instantaneous and a Receding Horizon controller are presented for the simplified model control layer. We show also that one of the proposed architectures allows the humanoid robot iCub to achieve a forward walking velocity of 0.3372 meters per second, which is the highest walking velocity achieved by the iCub robot.
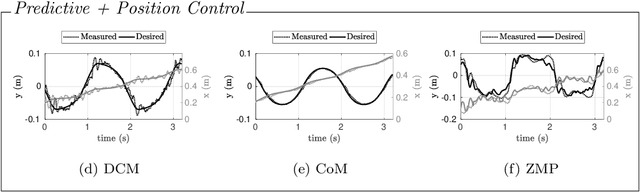
Online DCM Trajectory Generation for Push Recovery of Torque-Controlled Humanoid Robots
Oct 14, 2019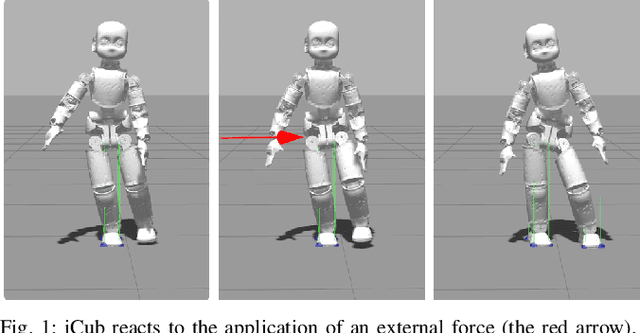
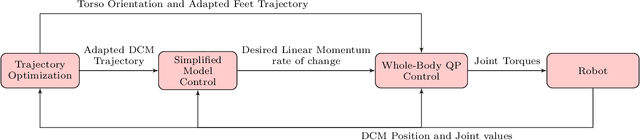
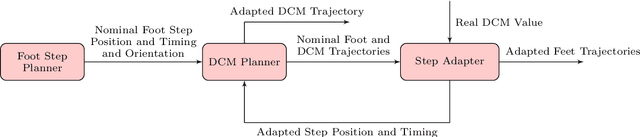
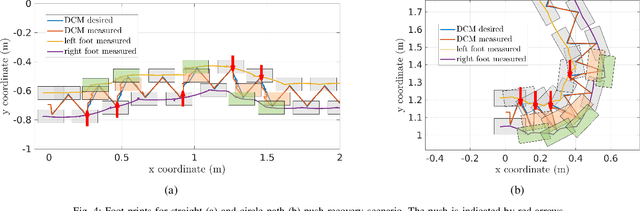
We present a computationally efficient method for online planning of bipedal walking trajectories with push recovery. In particular, the proposed methodology fits control architectures where the Divergent-Component-of-Motion (DCM) is planned beforehand, and adds a step adapter to adjust the planned trajectories and achieve push recovery. Assuming that the robot is in a single support state, the step adapter generates new positions and timings for the next step. The step adapter is active in single support phases only, but the proposed torque-control architecture considers double support phases too. The key idea for the design of the step adapter is to impose both initial and final DCM step values using an exponential interpolation of the time varying ZMP trajectory.This allows us to cast the push recovery problem as a Quadratic Programming (QP) one, and to solve it online with state-of-the-art optimisers. The overall approach is validated with simulations of the torque-controlled 33 kg humanoid robot iCub. Results show that the proposed strategy prevents the humanoid robot from falling while walking at 0.28 m/s and pushed with external forces up to 150 Newton for 0.05 seconds.
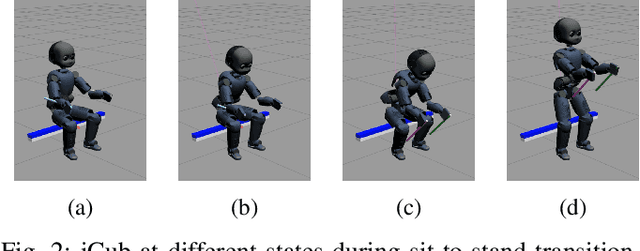
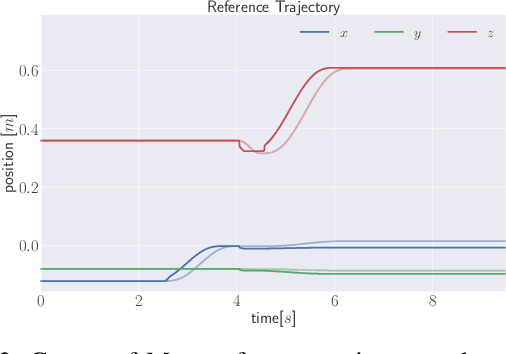
Trajectory Advancement for Robot Stand-up with Human Assistance
Oct 14, 2019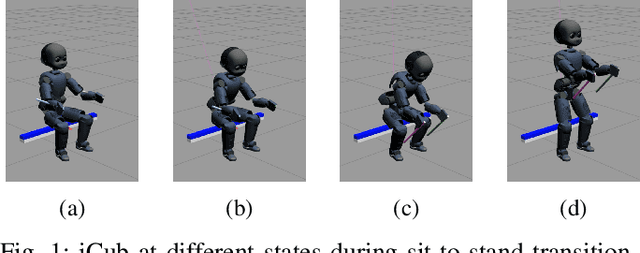
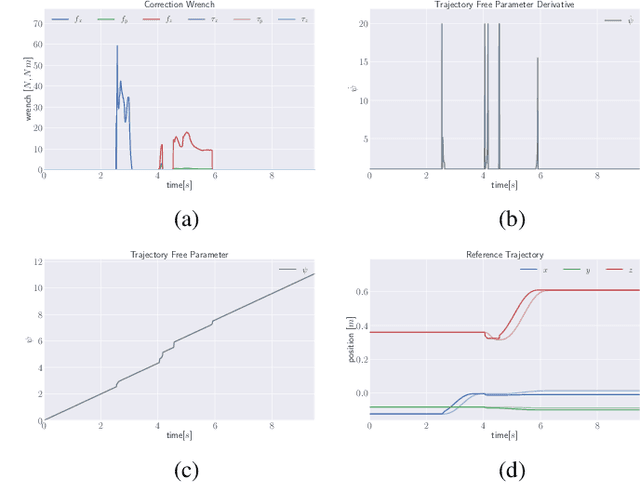
Physical interactions are inevitable part of human-robot collaboration tasks and rather than exhibiting simple reactive behaviors to human interactions, collaborative robots need to be endowed with intuitive behaviors. This paper proposes a trajectory advancement approach that facilitates advancement along a reference trajectory by leveraging assistance from helpful interaction wrench present during human-robot collaboration. We validate our approach through experiments in simulation with iCub.