 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Speed and Impact Resilient Teleoperation of Humanoid Robots
Sep 06, 2024



Teleoperation of humanoid robots has long been a challenging domain, necessitating advances in both hardware and software to achieve seamless and intuitive control. This paper presents an integrated solution based on several elements: calibration-free motion capture and retargeting, low-latency fast whole-body kinematics streaming toolbox and high-bandwidth cycloidal actuators. Our motion retargeting approach stands out for its simplicity, requiring only 7 IMUs to generate full-body references for the robot. The kinematics streaming toolbox, ensures real-time, responsive control of the robot's movements, significantly reducing latency and enhancing operational efficiency. Additionally, the use of cycloidal actuators makes it possible to withstand high speeds and impacts with the environment. Together, these approaches contribute to a teleoperation framework that offers unprecedented performance. Experimental results on the humanoid robot Nadia demonstrate the effectiveness of the integrated system.
Authoring and Operating Humanoid Behaviors On the Fly using Coactive Design Principles
Jul 25, 2023Humanoid robots have the potential to perform useful tasks in a world built for humans. However, communicating intention and teaming with a humanoid robot is a multi-faceted and complex problem. In this paper, we tackle the problems associated with quickly and interactively authoring new robot behavior that works on real hardware. We bring the powerful concepts of Affordance Templates and Coactive Design methodology to this problem to attempt to solve and explain it. In our approach we use interactive stance and hand pose goals along with other types of actions to author humanoid robot behavior on the fly. We then describe how our operator interface works to author behaviors on the fly and provide interdependence analysis charts for task approach and door opening. We present timings from real robot performances for traversing a push door and doing a pick and place task on our Nadia humanoid robot.
A Virtual-Reality Driven Approach for Generating Humanoid Multi-Contact Trajectories
Mar 14, 2023We present a virtual reality (VR) framework designed to intuitively generate humanoid multi-contact maneuvers for use in unstructured environments. Our framework allows the operator to directly manipulate the inverse kinematics objectives which parameterize a trajectory. Kinematic objectives consisting of spatial poses, center-of-mass position and joint positions are used in an optimization based inverse kinematics solver to compute whole-body configurations while enforcing static contact stability. Virtual ``anchors'' allow the operator to freely drag and constrain the robot as well as modify objective weights and constraint sets. The interface's design novelty is a generalized use of anchors which enables arbitrary posture and contact modes. The operator is aided by visual cues of actuation feasibility and tools for rapid anchor placement. We demonstrate our approach in simulation and hardware on a NASA Valkyrie humanoid, focusing on multi-contact trajectories which are challenging to generate autonomously or through alternative teleoperation approaches.
Teleoperation of Humanoid Robots: A Survey
Jan 11, 2023



Teleoperation of humanoid robots enables the integration of the cognitive skills and domain expertise of humans with the physical capabilities of humanoid robots. The operational versatility of humanoid robots makes them the ideal platform for a wide range of applications when teleoperating in a remote environment. However, the complexity of humanoid robots imposes challenges for teleoperation, particularly in unstructured dynamic environments with limited communication. Many advancements have been achieved in the last decades in this area, but a comprehensive overview is still missing. This survey paper gives an extensive overview of humanoid robot teleoperation, presenting the general architecture of a teleoperation system and analyzing the different components. We also discuss different aspects of the topic, including technological and methodological advances, as well as potential applications. A web-based version of the paper can be found at https://humanoid-teleoperation.github.io/.
Angular Center of Mass for Humanoid Robots
Oct 14, 2022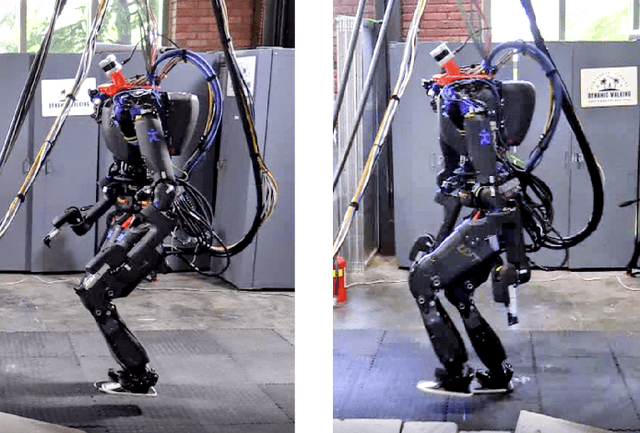
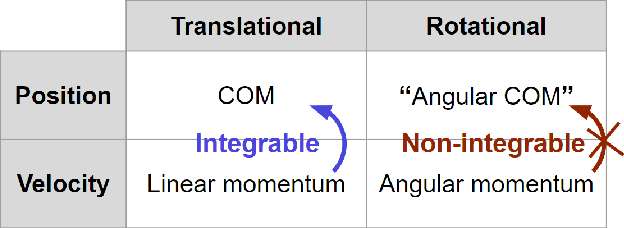
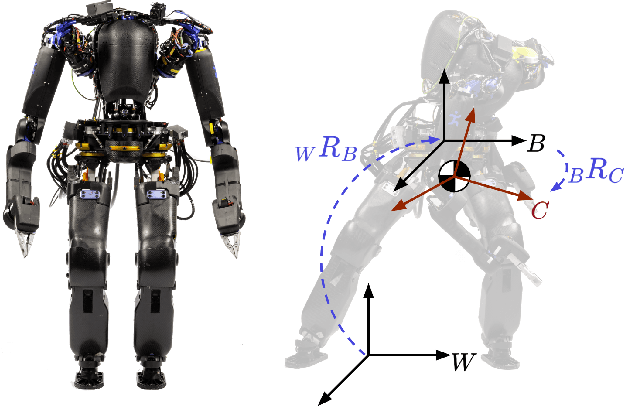
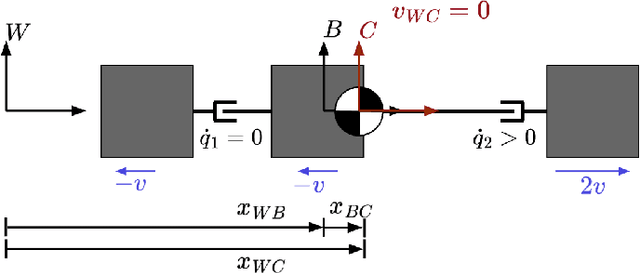
The center of mass (CoM) has been widely used in planning and control for humanoid locomotion, because it carries key information about the position of a robot. In contrast, an ''angular center of mass'' (ACoM), which provides an ''average'' orientation of a robot, is less well-known in the community, although the concept has been in the literature for about a decade. In this paper, we introduce the ACoM from a CoM perspective. We optimize for an ACoM on the humanoid robot Nadia, and demonstrate its application in walking with natural upper body motion on hardware.
A Fast, Autonomous, Bipedal Walking Behavior over Rapid Regions
Jul 17, 2022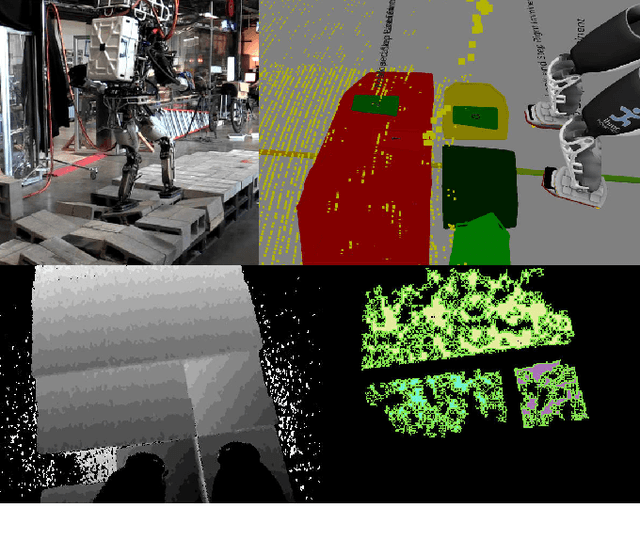
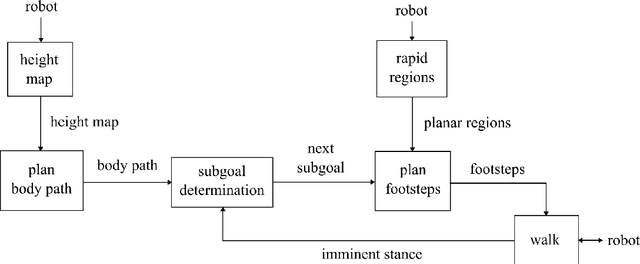
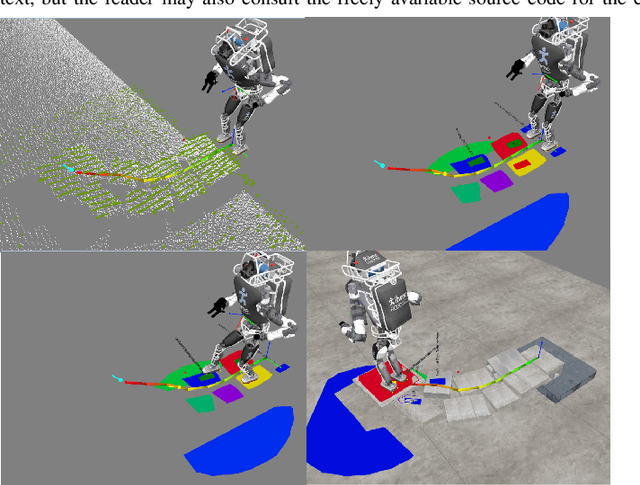
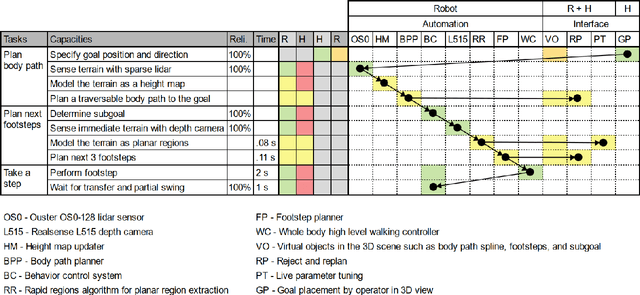
In trying to build humanoid robots that perform useful tasks in a world built for humans, we address the problem of autonomous locomotion. Humanoid robot planning and control algorithms for walking over rough terrain are becoming increasingly capable. At the same time, commercially available depth cameras have been getting more accurate and GPU computing has become a primary tool in AI research. In this paper, we present a newly constructed behavior control system for achieving fast, autonomous, bipedal walking, without pauses or deliberation. We achieve this using a recently published rapid planar regions perception algorithm, a height map based body path planner, an A* footstep planner, and a momentum-based walking controller. We put these elements together to form a behavior control system supported by modern software development practices and simulation tools.
Humanoid Path Planning over Rough Terrain using Traversability Assessment
Mar 01, 2022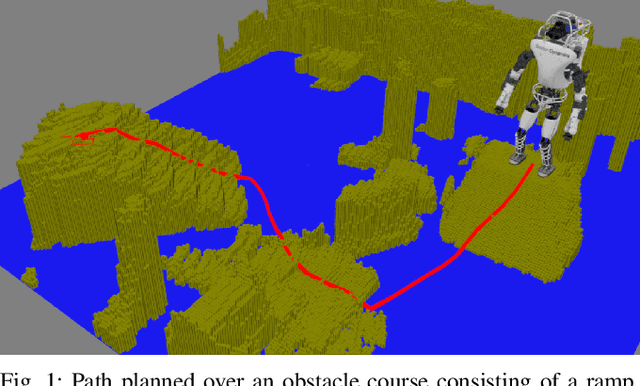
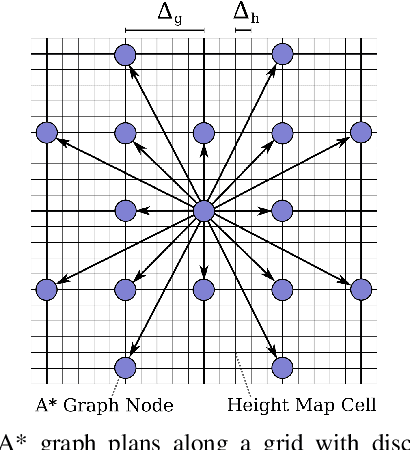
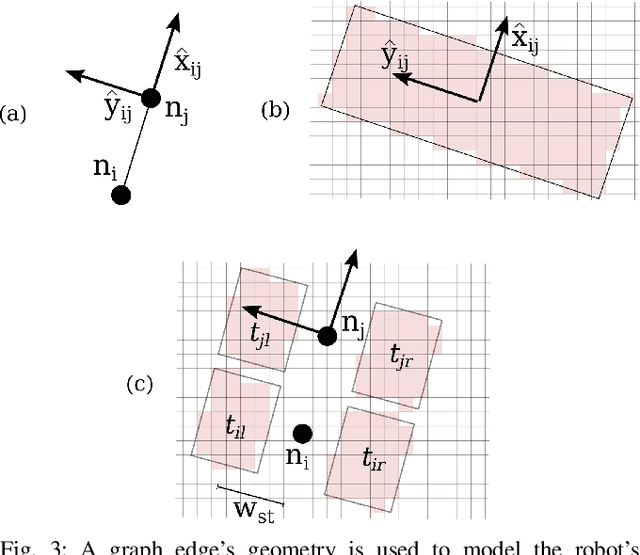
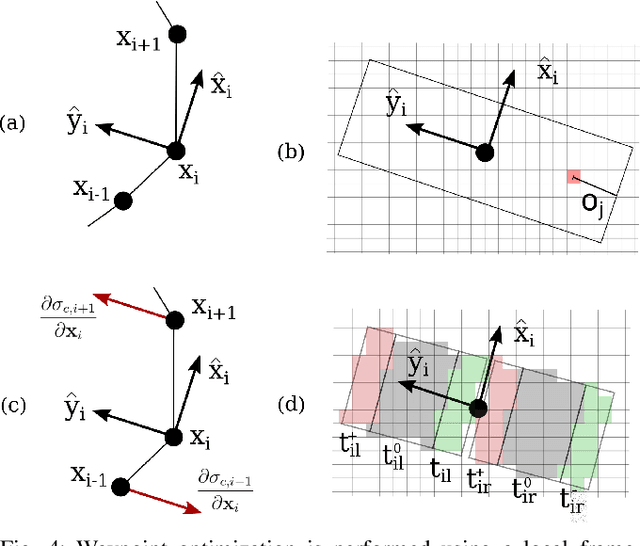
We present a planning framework designed for humanoid navigation over challenging terrain. This framework is designed to plan a traversable, smooth, and collision-free path using a 2.5D height map. The planner is comprised of two stages. The first stage consists of an A* planner which reasons about traversability using terrain features. A novel cost function is presented which encodes the bipedal gait directly into the graph structure, enabling natural paths that are robust to small gaps in traversability. The second stage is an optimization framework which smooths the path while further improving traversability. The planner is tested on a variety of terrains in simulation and is combined with a footstep planner and balance controller to create an integrated navigation framework, which is demonstrated on a DRC Boston Dynamics Atlas robot.
Non-Linear Trajectory Optimization for Large Step-Ups: Application to the Humanoid Robot Atlas
Apr 25, 2020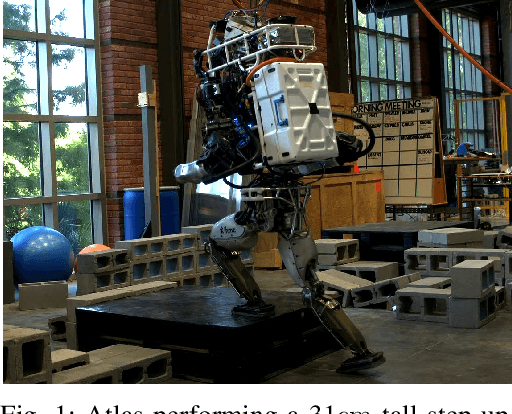
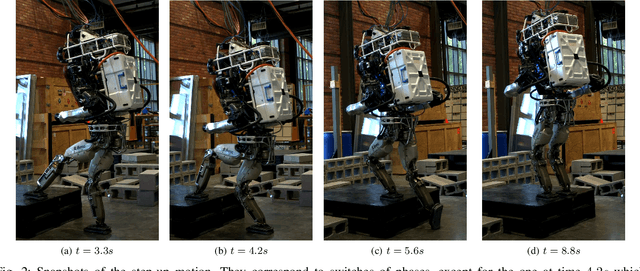
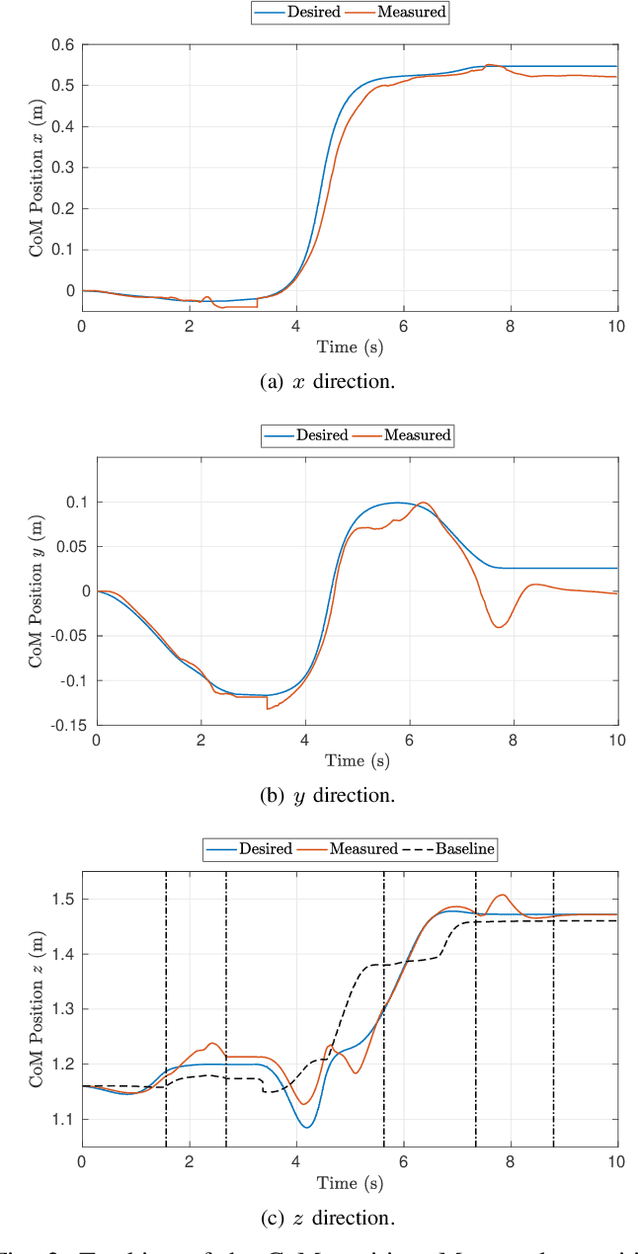
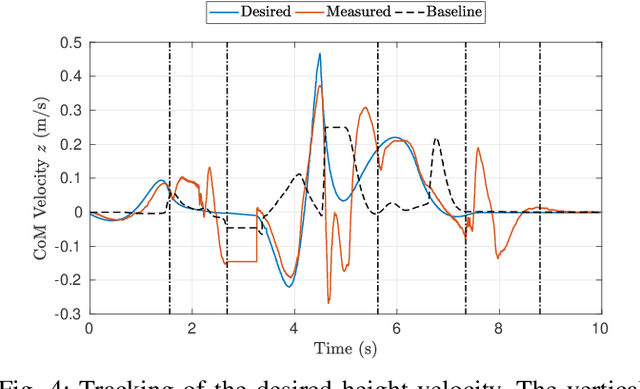
Performing large step-ups is a challenging task for a humanoid robot. It requires the robot to perform motions at the limit of its reachable workspace while straining to move its body upon the obstacle. This paper presents a non-linear trajectory optimization method for generating step-up motions. We adopt a simplified model of the centroidal dynamics to generate feasible Center of Mass trajectories aimed at reducing the torques required for the step-up motion. The activation and deactivation of contacts at both feet are considered explicitly. The output of the planner is a Center of Mass trajectory plus an optimal duration for each walking phase. These desired values are stabilized by a whole-body controller that determines a set of desired joint torques. We experimentally demonstrate that by using trajectory optimization techniques, the maximum torque required to the full-size humanoid robot Atlas can be reduced up to 20% when performing a step-up motion.
0-Step Capturability, Motion Decomposition and Global Feedback Control of the 3D Variable Height-Inverted Pendulum
Dec 12, 2019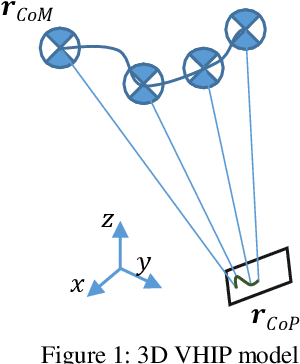
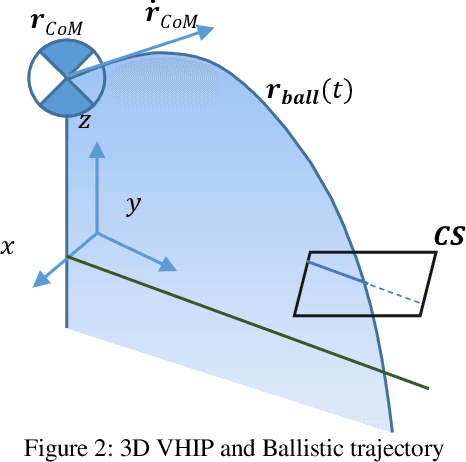
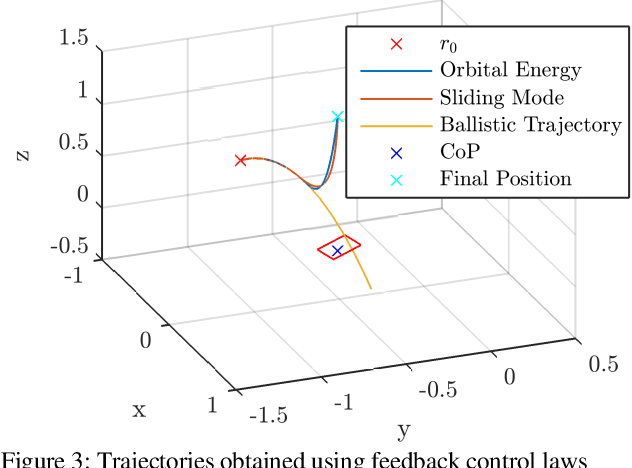
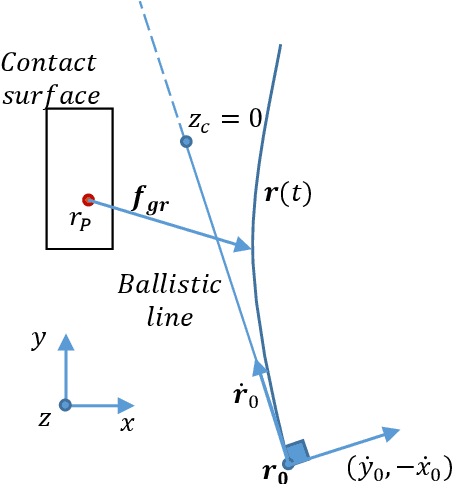
One common method for stabilizing robots after a push is the Instantaneous Capture Point, however, this has the fundamental limitation of assuming constant height. Although there are several works for balancing bipedal robots including height variations in 2D, the amount of literature on 3D models is limited. There are optimization methods using variable Center of Pressure (CoP) and reaction force to the ground, although they do not provide the physical region where a robot can step and require a precomputation for the analysis. This work provides the necessary and sufficient conditions to maintain balance of the 3D Variable Height Inverted Pendulum (VHIP) with both, fixed and variable CoP. We also prove that the 3D VHIP with Fixed CoP is the same as its 2D version, and we generalize controllers working on the 2D VHIP to the 3D VHIP. We also show the generalization of the Divergent Component of Motion to the 3D VHIP and we provide an alternative motion decomposition for the analysis of height and CoP strategies independently. This allow us to generalize previous global feedback controllers done in the 2D VHIP to the 3D VHIP with a Variable CoP.
Deploying the NASA Valkyrie Humanoid for IED Response: An Initial Approach and Evaluation Summary
Oct 02, 2019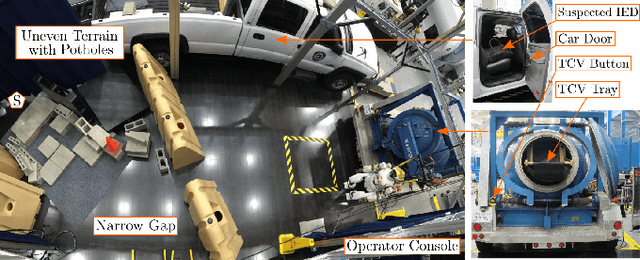
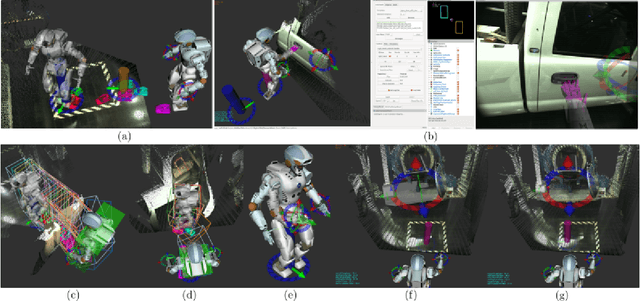
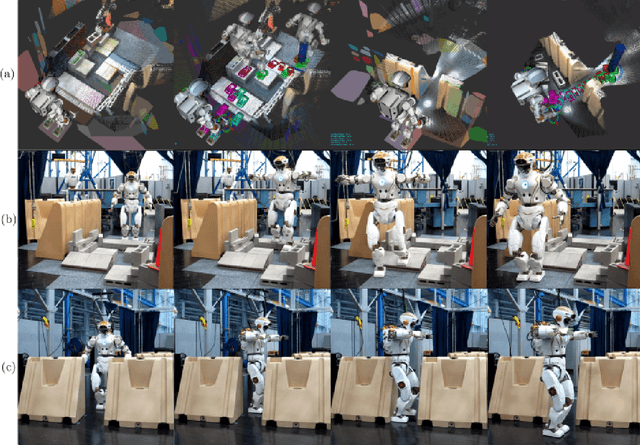
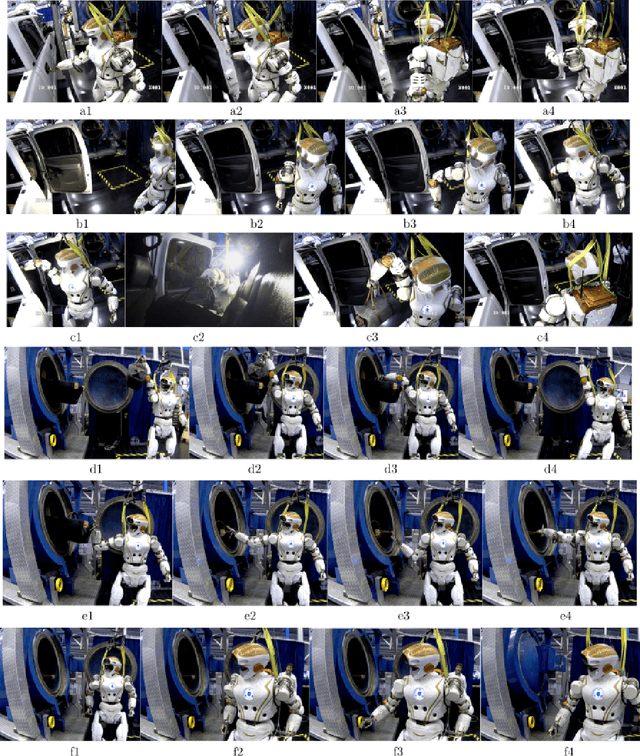
As part of a feasibility study, this paper shows the NASA Valkyrie humanoid robot performing an end-to-end improvised explosive device (IED) response task. To demonstrate and evaluate robot capabilities, sub-tasks highlight different locomotion, manipulation, and perception requirements: traversing uneven terrain, passing through a narrow passageway, opening a car door, retrieving a suspected IED, and securing the IED in a total containment vessel (TCV). For each sub-task, a description of the technical approach and the hidden challenges that were overcome during development are presented. The discussion of results, which explicitly includes existing limitations, is aimed at motivating continued research and development to enable practical deployment of humanoid robots for IED response. For instance, the data shows that operator pauses contribute to 50\% of the total completion time, which implies that further work is needed on user interfaces for increasing task completion efficiency.