 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMixed Reality Teleoperation Assistance for Direct Control of Humanoids
Nov 01, 2024Teleoperation plays a crucial role in enabling robot operations in challenging environments, yet existing limitations in effectiveness and accuracy necessitate the development of innovative strategies for improving teleoperated tasks. This article introduces a novel approach that utilizes mixed reality and assistive autonomy to enhance the efficiency and precision of humanoid robot teleoperation. By leveraging Probabilistic Movement Primitives, object detection, and Affordance Templates, the assistance combines user motion with autonomous capabilities, achieving task efficiency while maintaining human-like robot motion. Experiments and feasibility studies on the Nadia robot confirm the effectiveness of the proposed framework.
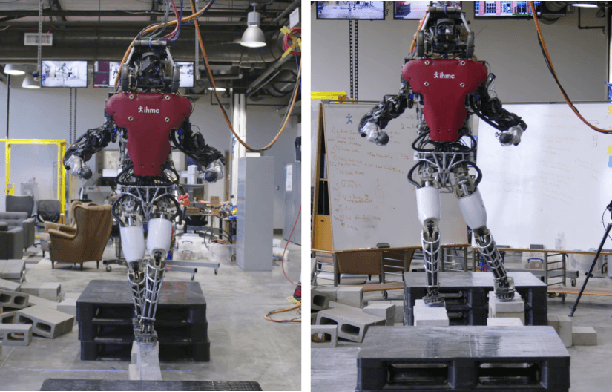
Non-Linear Trajectory Optimization for Large Step-Ups: Application to the Humanoid Robot Atlas
Apr 25, 2020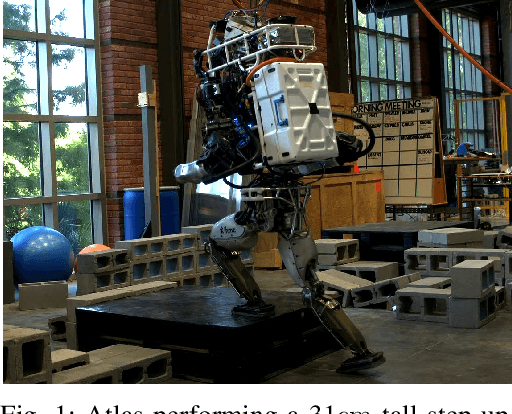
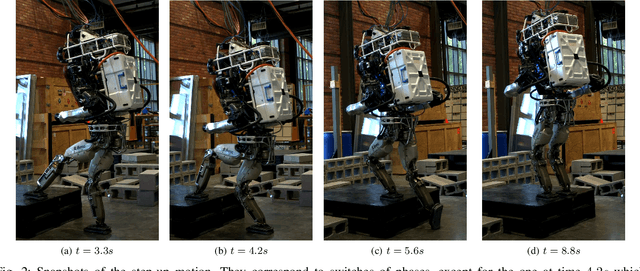
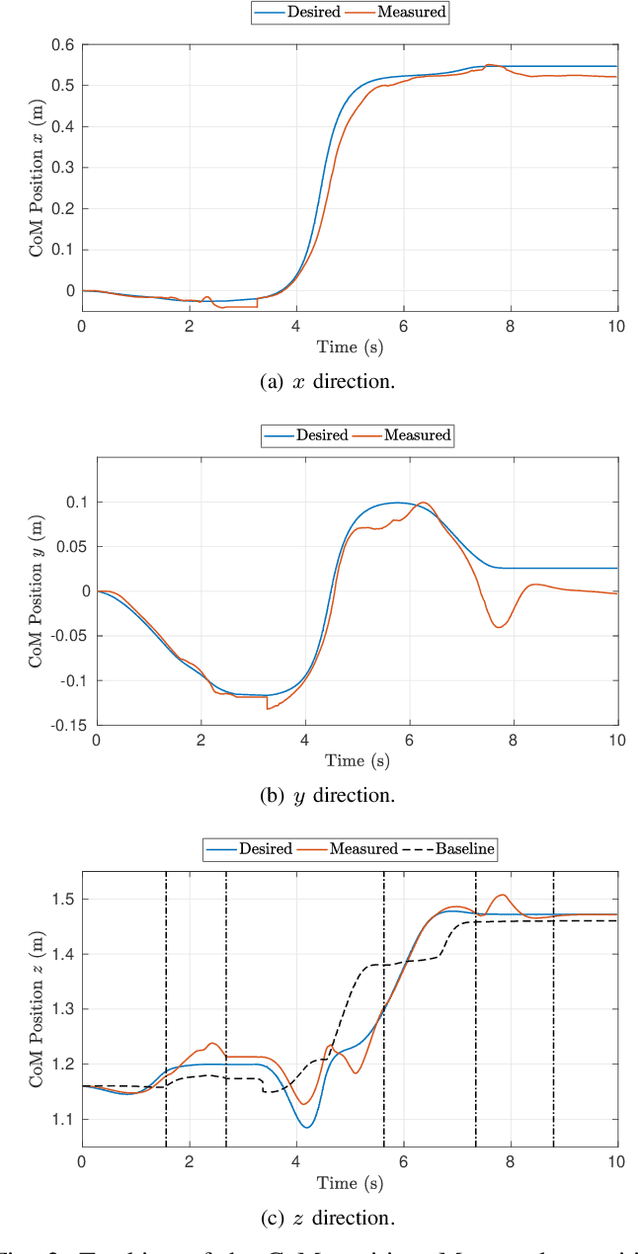
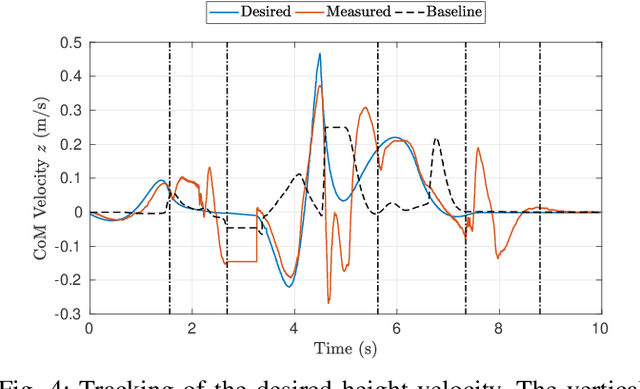
Performing large step-ups is a challenging task for a humanoid robot. It requires the robot to perform motions at the limit of its reachable workspace while straining to move its body upon the obstacle. This paper presents a non-linear trajectory optimization method for generating step-up motions. We adopt a simplified model of the centroidal dynamics to generate feasible Center of Mass trajectories aimed at reducing the torques required for the step-up motion. The activation and deactivation of contacts at both feet are considered explicitly. The output of the planner is a Center of Mass trajectory plus an optimal duration for each walking phase. These desired values are stabilized by a whole-body controller that determines a set of desired joint torques. We experimentally demonstrate that by using trajectory optimization techniques, the maximum torque required to the full-size humanoid robot Atlas can be reduced up to 20% when performing a step-up motion.
Footstep Planning for Autonomous Walking Over Rough Terrain
Jul 19, 2019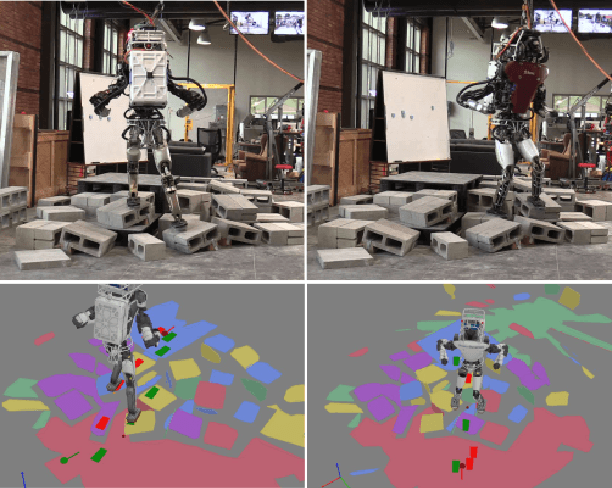
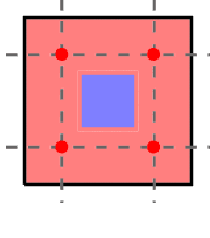
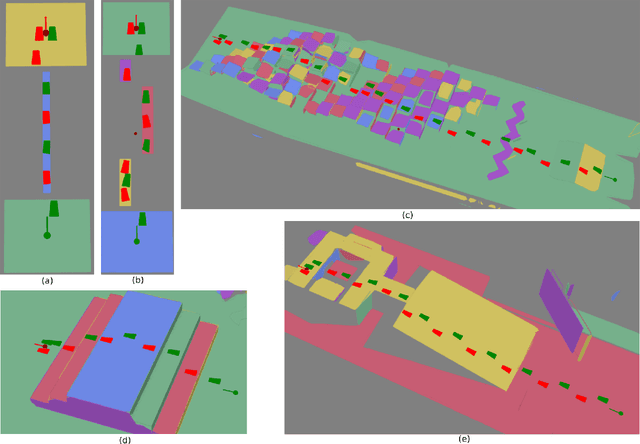
To increase the speed of operation and reduce operator burden, humanoid robots must be able to function autonomously, even in complex, cluttered environments. For this to be possible, they must be able to quickly and efficiently compute desired footsteps to reach a goal. In this work, we present a new A* footstep planner that utilizes a planar region representation of the environment enable footstep planning over rough terrain. To increase the number of available footholds, we present an approach to allow the use of partial footholds during the planning process. The footstep plan solutions are then post-processed to capture better solutions that lie between the lattice discretization of the footstep graph. We then demonstrate this planner over a variety of virtual and real world environments, including some that require partial footholds and rough terrain using the Atlas and Valkyrie humanoid robots.
Capture Point Trajectories for Reduced Knee Bend using Step Time Optimization
Dec 27, 2017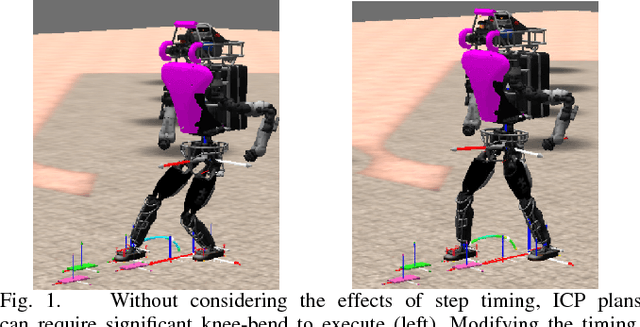
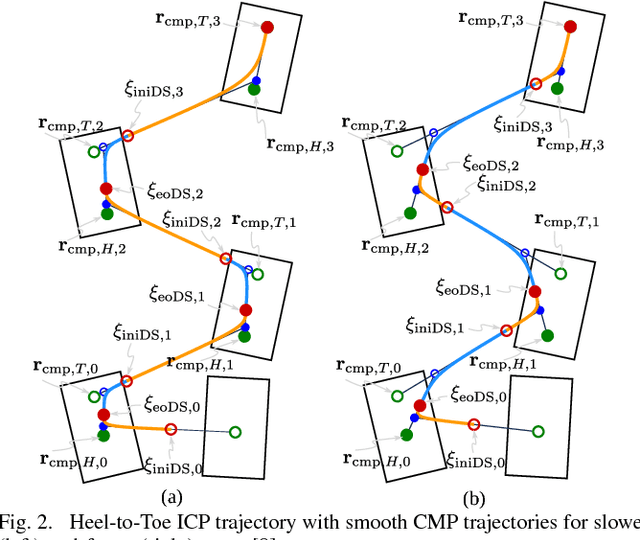
Traditional force-controlled bipedal walking utilizes highly bent knees, resulting in high torques as well as inefficient, and unnatural motions. Even with advanced planning of center of mass height trajectories, significant amounts of knee-bend can be required due to arbitrarily chosen step timing. In this work, we present a method that examines the effects of adjusting the step timing to produce plans that only require a specified amount of knee bend to execute. We define a quadratic program that optimizes the step timings and is executed using a simple iterative feedback approach to account for higher order terms. We then illustrate the effectiveness of this algorithm by comparing the walking gait of the simulated Atlas humanoid with and without the algorithm, showing that the algorithm significantly reduces the required knee bend for execution. We aim to later use this approach to achieve natural, efficient walking motions on humanoid robot platforms.
Walking Stabilization Using Step Timing and Location Adjustment on the Humanoid Robot, Atlas
Dec 27, 2017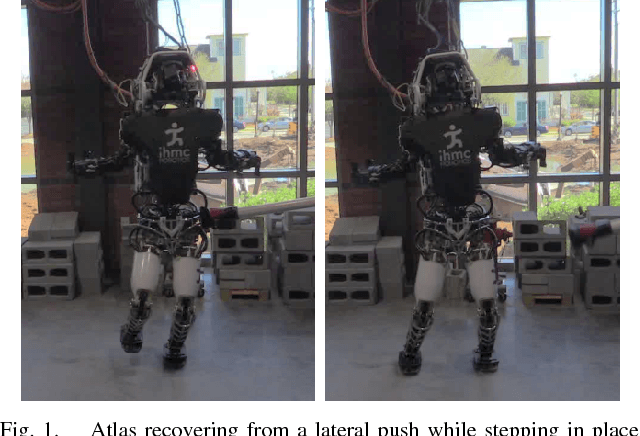
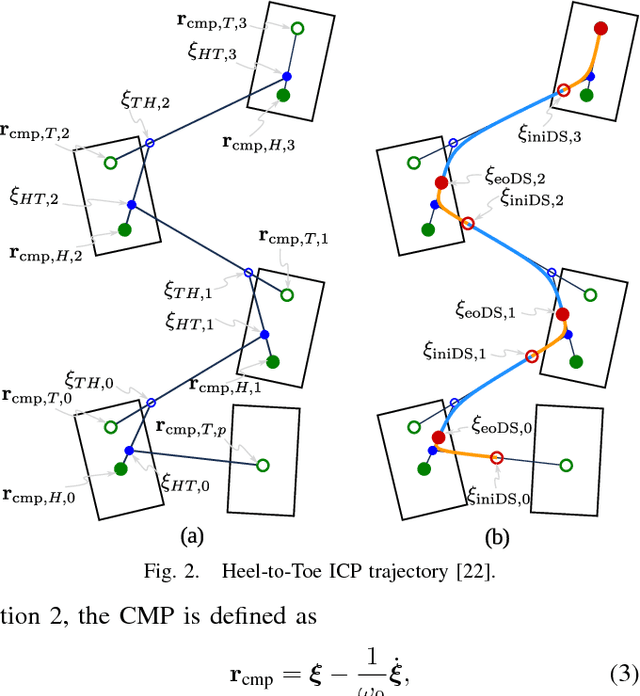
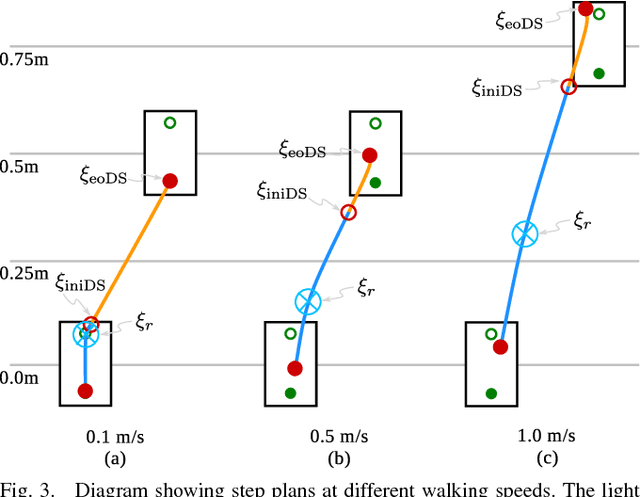
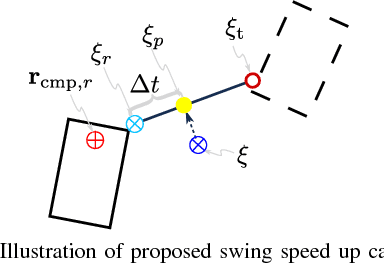
While humans are highly capable of recovering from external disturbances and uncertainties that result in large tracking errors, humanoid robots have yet to reliably mimic this level of robustness. Essential to this is the ability to combine traditional "ankle strategy" balancing with step timing and location adjustment techniques. In doing so, the robot is able to step quickly to the necessary location to continue walking. In this work, we present both a new swing speed up algorithm to adjust the step timing, allowing the robot to set the foot down more quickly to recover from errors in the direction of the current capture point dynamics, and a new algorithm to adjust the desired footstep, expanding the base of support to utilize the center of pressure (CoP)-based ankle strategy for balance. We then utilize the desired centroidal moment pivot (CMP) to calculate the momentum rate of change for our inverse-dynamics based whole-body controller. We present simulation and experimental results using this work, and discuss performance limitations and potential improvements.
Straight-Leg Walking Through Underconstrained Whole-Body Control
Sep 12, 2017
We present an approach for achieving a natural, efficient gait on bipedal robots using straightened legs and toe-off. Our algorithm avoids complex height planning by allowing a whole-body controller to determine the straightest possible leg configuration at run-time. The controller solutions are biased towards a straight leg configuration by projecting leg joint angle objectives into the null-space of the other quadratic program motion objectives. To allow the legs to remain straight throughout the gait, toe-off was utilized to increase the kinematic reachability of the legs. The toe-off motion is achieved through underconstraining the foot position, allowing it to emerge naturally. We applied this approach of under-specifying the motion objectives to the Atlas humanoid, allowing it to walk over a variety of terrain. We present both experimental and simulation results and discuss performance limitations and potential improvements.