 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage Conditioned Spatial Relation Reasoning for 3D Object Grounding
Nov 17, 2022



Localizing objects in 3D scenes based on natural language requires understanding and reasoning about spatial relations. In particular, it is often crucial to distinguish similar objects referred by the text, such as "the left most chair" and "a chair next to the window". In this work we propose a language-conditioned transformer model for grounding 3D objects and their spatial relations. To this end, we design a spatial self-attention layer that accounts for relative distances and orientations between objects in input 3D point clouds. Training such a layer with visual and language inputs enables to disambiguate spatial relations and to localize objects referred by the text. To facilitate the cross-modal learning of relations, we further propose a teacher-student approach where the teacher model is first trained using ground-truth object labels, and then helps to train a student model using point cloud inputs. We perform ablation studies showing advantages of our approach. We also demonstrate our model to significantly outperform the state of the art on the challenging Nr3D, Sr3D and ScanRefer 3D object grounding datasets.
Learning Reward Functions for Robotic Manipulation by Observing Humans
Nov 16, 2022Observing a human demonstrator manipulate objects provides a rich, scalable and inexpensive source of data for learning robotic policies. However, transferring skills from human videos to a robotic manipulator poses several challenges, not least a difference in action and observation spaces. In this work, we use unlabeled videos of humans solving a wide range of manipulation tasks to learn a task-agnostic reward function for robotic manipulation policies. Thanks to the diversity of this training data, the learned reward function sufficiently generalizes to image observations from a previously unseen robot embodiment and environment to provide a meaningful prior for directed exploration in reinforcement learning. The learned rewards are based on distances to a goal in an embedding space learned using a time-contrastive objective. By conditioning the function on a goal image, we are able to reuse one model across a variety of tasks. Unlike prior work on leveraging human videos to teach robots, our method, Human Offline Learned Distances (HOLD) requires neither a priori data from the robot environment, nor a set of task-specific human demonstrations, nor a predefined notion of correspondence across morphologies, yet it is able to accelerate training of several manipulation tasks on a simulated robot arm compared to using only a sparse reward obtained from task completion.
A Memory Transformer Network for Incremental Learning
Oct 10, 2022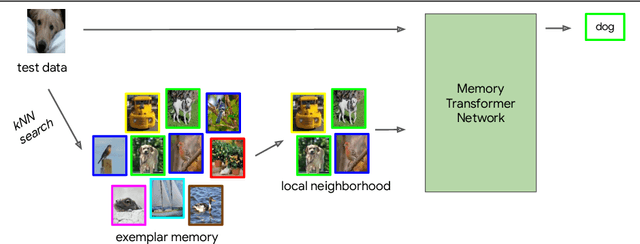
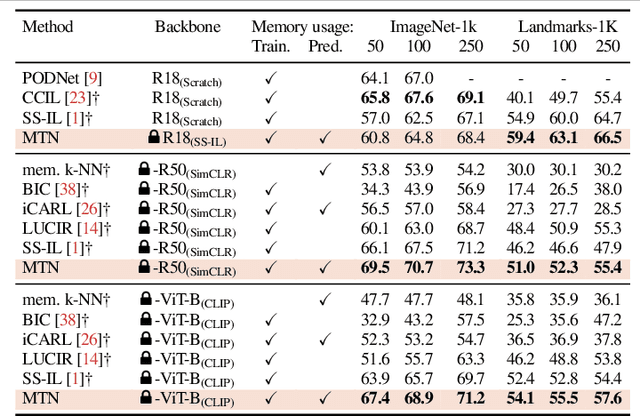
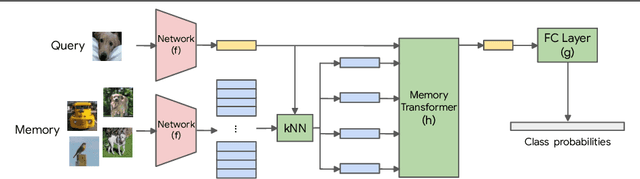
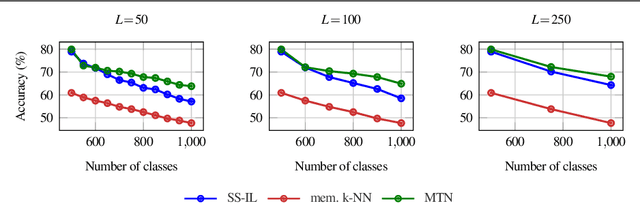
We study class-incremental learning, a training setup in which new classes of data are observed over time for the model to learn from. Despite the straightforward problem formulation, the naive application of classification models to class-incremental learning results in the "catastrophic forgetting" of previously seen classes. One of the most successful existing methods has been the use of a memory of exemplars, which overcomes the issue of catastrophic forgetting by saving a subset of past data into a memory bank and utilizing it to prevent forgetting when training future tasks. In our paper, we propose to enhance the utilization of this memory bank: we not only use it as a source of additional training data like existing works but also integrate it in the prediction process explicitly.Our method, the Memory Transformer Network (MTN), learns how to combine and aggregate the information from the nearest neighbors in the memory with a transformer to make more accurate predictions. We conduct extensive experiments and ablations to evaluate our approach. We show that MTN achieves state-of-the-art performance on the challenging ImageNet-1k and Google-Landmarks-1k incremental learning benchmarks.
Instruction-driven history-aware policies for robotic manipulations
Sep 22, 2022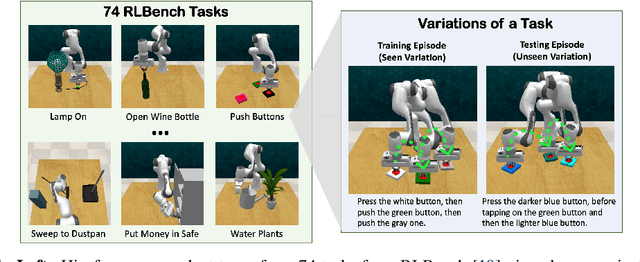
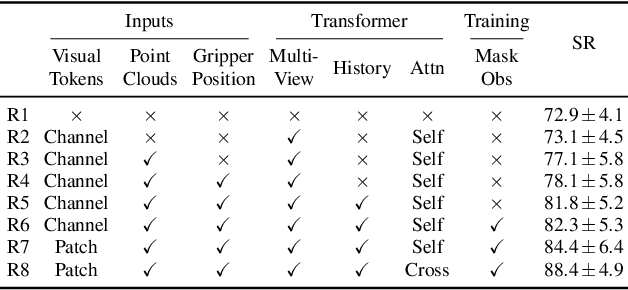
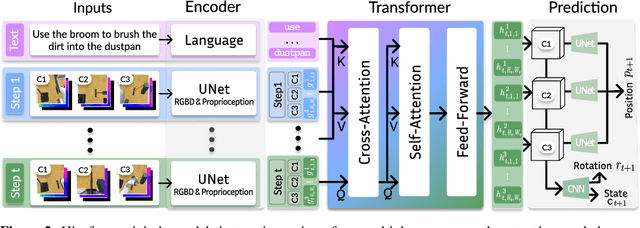
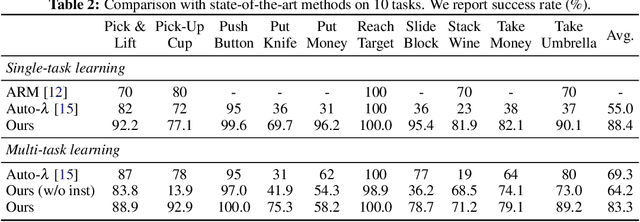
In human environments, robots are expected to accomplish a variety of manipulation tasks given simple natural language instructions. Yet, robotic manipulation is extremely challenging as it requires fine-grained motor control, long-term memory as well as generalization to previously unseen tasks and environments. To address these challenges, we propose a unified transformer-based approach that takes into account multiple inputs. In particular, our transformer architecture integrates (i) natural language instructions and (ii) multi-view scene observations while (iii) keeping track of the full history of observations and actions. Such an approach enables learning dependencies between history and instructions and improves manipulation precision using multiple views. We evaluate our method on the challenging RLBench benchmark and on a real-world robot. Notably, our approach scales to 74 diverse RLBench tasks and outperforms the state of the art. We also address instruction-conditioned tasks and demonstrate excellent generalization to previously unseen variations.
Enforcing the consensus between Trajectory Optimization and Policy Learning for precise robot control
Sep 19, 2022
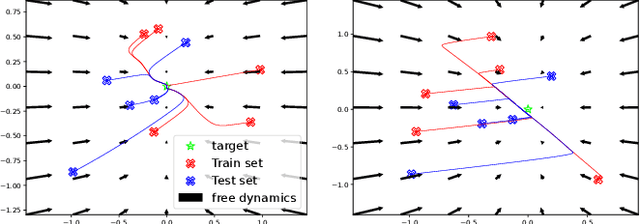
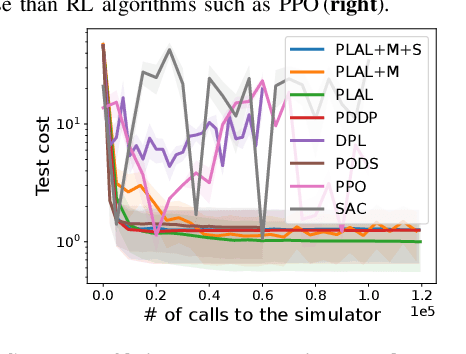
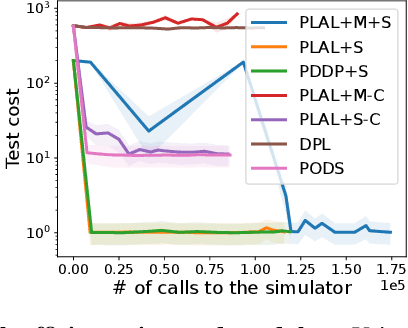
Reinforcement learning (RL) and trajectory optimization (TO) present strong complementary advantages. On one hand, RL approaches are able to learn global control policies directly from data, but generally require large sample sizes to properly converge towards feasible policies. On the other hand, TO methods are able to exploit gradient-based information extracted from simulators to quickly converge towards a locally optimal control trajectory which is only valid within the vicinity of the solution. Over the past decade, several approaches have aimed to adequately combine the two classes of methods in order to obtain the best of both worlds. Following on from this line of research, we propose several improvements on top of these approaches to learn global control policies quicker, notably by leveraging sensitivity information stemming from TO methods via Sobolev learning, and augmented Lagrangian techniques to enforce the consensus between TO and policy learning. We evaluate the benefits of these improvements on various classical tasks in robotics through comparison with existing approaches in the literature.
Learning from Unlabeled 3D Environments for Vision-and-Language Navigation
Aug 24, 2022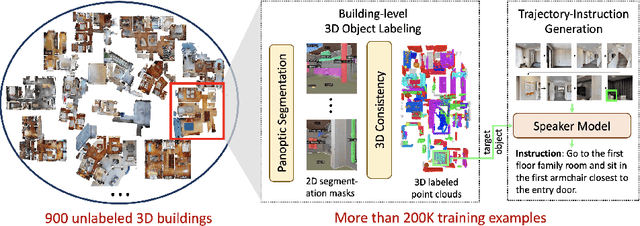
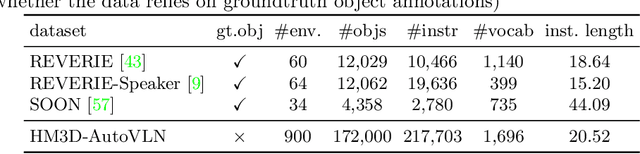
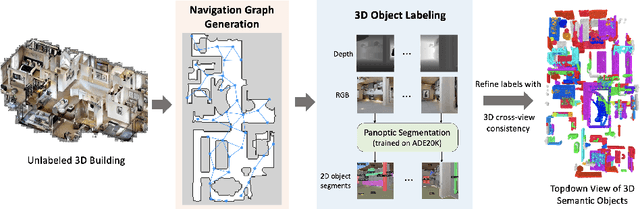
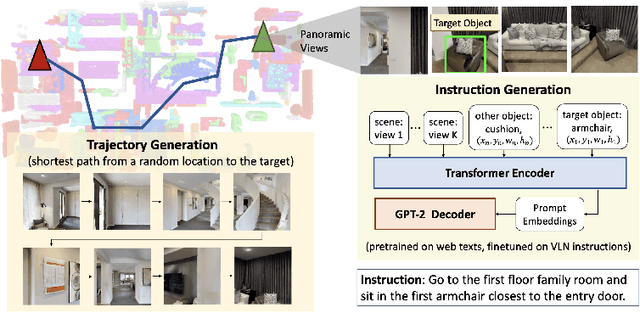
In vision-and-language navigation (VLN), an embodied agent is required to navigate in realistic 3D environments following natural language instructions. One major bottleneck for existing VLN approaches is the lack of sufficient training data, resulting in unsatisfactory generalization to unseen environments. While VLN data is typically collected manually, such an approach is expensive and prevents scalability. In this work, we address the data scarcity issue by proposing to automatically create a large-scale VLN dataset from 900 unlabeled 3D buildings from HM3D. We generate a navigation graph for each building and transfer object predictions from 2D to generate pseudo 3D object labels by cross-view consistency. We then fine-tune a pretrained language model using pseudo object labels as prompts to alleviate the cross-modal gap in instruction generation. Our resulting HM3D-AutoVLN dataset is an order of magnitude larger than existing VLN datasets in terms of navigation environments and instructions. We experimentally demonstrate that HM3D-AutoVLN significantly increases the generalization ability of resulting VLN models. On the SPL metric, our approach improves over state of the art by 7.1% and 8.1% on the unseen validation splits of REVERIE and SOON datasets respectively.
TL;DW? Summarizing Instructional Videos with Task Relevance & Cross-Modal Saliency
Aug 14, 2022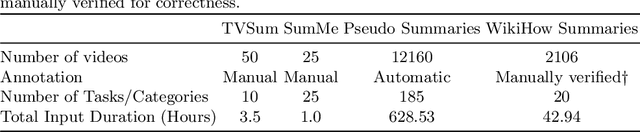
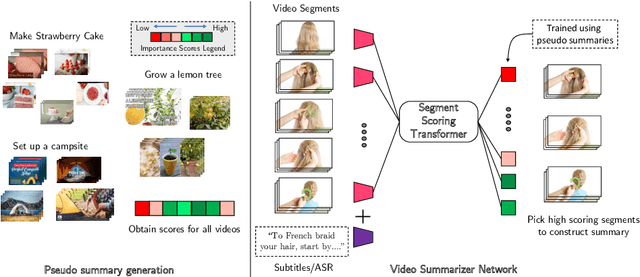
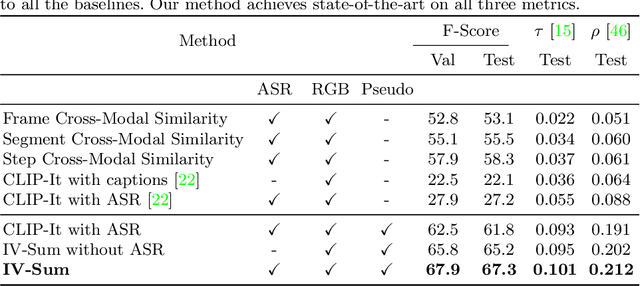
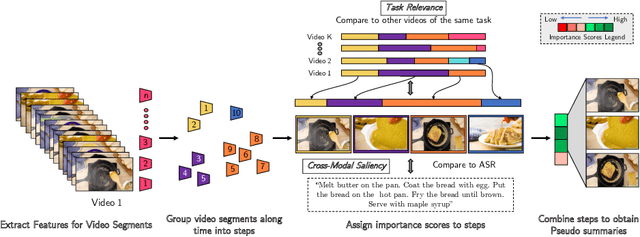
YouTube users looking for instructions for a specific task may spend a long time browsing content trying to find the right video that matches their needs. Creating a visual summary (abridged version of a video) provides viewers with a quick overview and massively reduces search time. In this work, we focus on summarizing instructional videos, an under-explored area of video summarization. In comparison to generic videos, instructional videos can be parsed into semantically meaningful segments that correspond to important steps of the demonstrated task. Existing video summarization datasets rely on manual frame-level annotations, making them subjective and limited in size. To overcome this, we first automatically generate pseudo summaries for a corpus of instructional videos by exploiting two key assumptions: (i) relevant steps are likely to appear in multiple videos of the same task (Task Relevance), and (ii) they are more likely to be described by the demonstrator verbally (Cross-Modal Saliency). We propose an instructional video summarization network that combines a context-aware temporal video encoder and a segment scoring transformer. Using pseudo summaries as weak supervision, our network constructs a visual summary for an instructional video given only video and transcribed speech. To evaluate our model, we collect a high-quality test set, WikiHow Summaries, by scraping WikiHow articles that contain video demonstrations and visual depictions of steps allowing us to obtain the ground-truth summaries. We outperform several baselines and a state-of-the-art video summarization model on this new benchmark.
AlignSDF: Pose-Aligned Signed Distance Fields for Hand-Object Reconstruction
Jul 26, 2022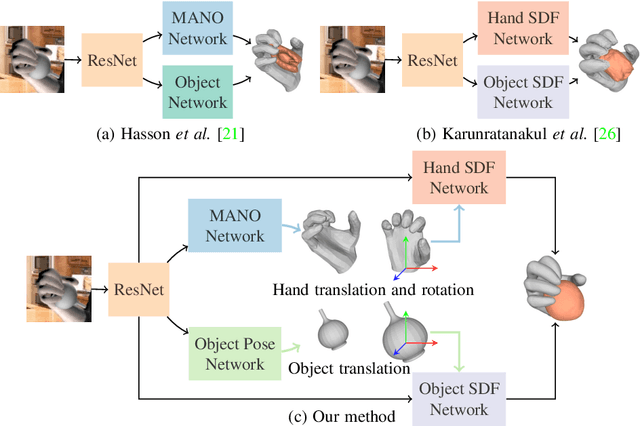
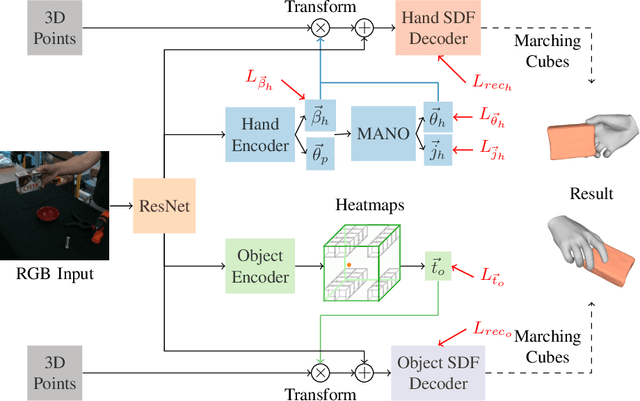
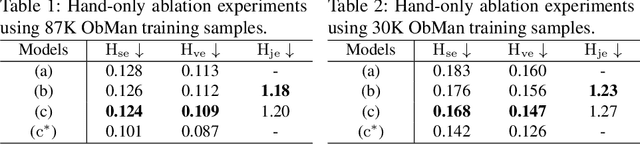
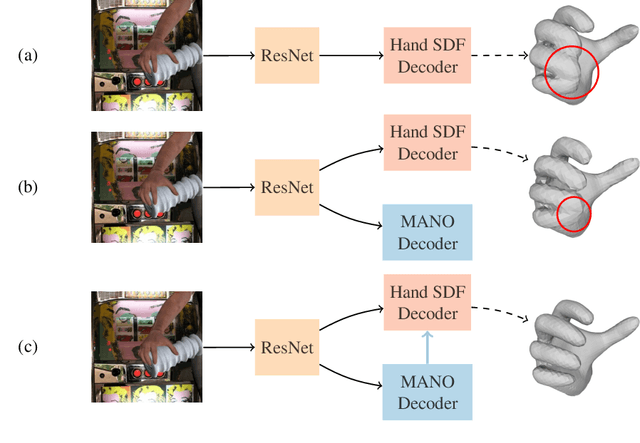
Recent work achieved impressive progress towards joint reconstruction of hands and manipulated objects from monocular color images. Existing methods focus on two alternative representations in terms of either parametric meshes or signed distance fields (SDFs). On one side, parametric models can benefit from prior knowledge at the cost of limited shape deformations and mesh resolutions. Mesh models, hence, may fail to precisely reconstruct details such as contact surfaces of hands and objects. SDF-based methods, on the other side, can represent arbitrary details but are lacking explicit priors. In this work we aim to improve SDF models using priors provided by parametric representations. In particular, we propose a joint learning framework that disentangles the pose and the shape. We obtain hand and object poses from parametric models and use them to align SDFs in 3D space. We show that such aligned SDFs better focus on reconstructing shape details and improve reconstruction accuracy both for hands and objects. We evaluate our method and demonstrate significant improvements over the state of the art on the challenging ObMan and DexYCB benchmarks.
Beyond Transfer Learning: Co-finetuning for Action Localisation
Jul 08, 2022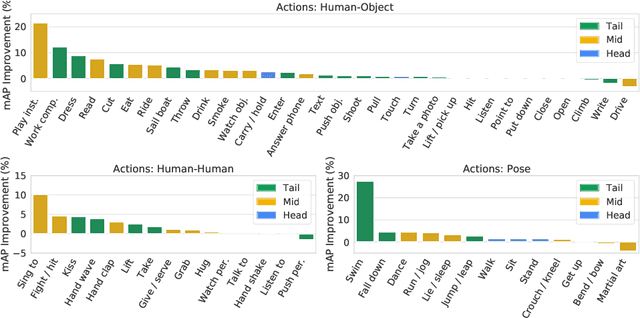
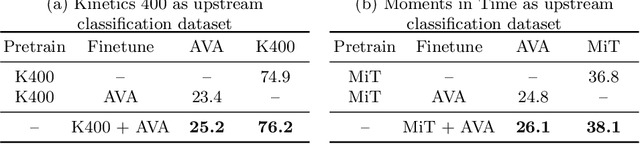
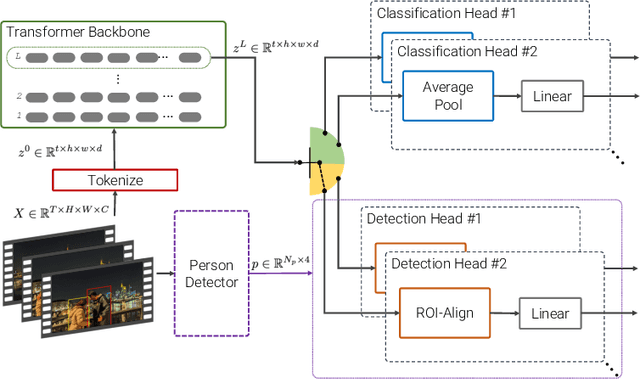
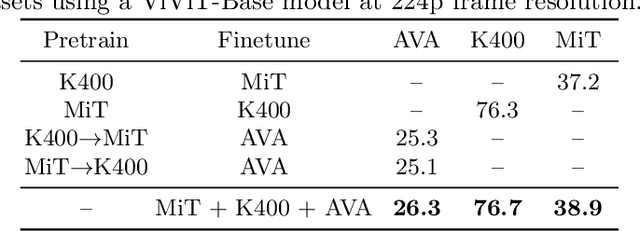
Transfer learning is the predominant paradigm for training deep networks on small target datasets. Models are typically pretrained on large ``upstream'' datasets for classification, as such labels are easy to collect, and then finetuned on ``downstream'' tasks such as action localisation, which are smaller due to their finer-grained annotations. In this paper, we question this approach, and propose co-finetuning -- simultaneously training a single model on multiple ``upstream'' and ``downstream'' tasks. We demonstrate that co-finetuning outperforms traditional transfer learning when using the same total amount of data, and also show how we can easily extend our approach to multiple ``upstream'' datasets to further improve performance. In particular, co-finetuning significantly improves the performance on rare classes in our downstream task, as it has a regularising effect, and enables the network to learn feature representations that transfer between different datasets. Finally, we observe how co-finetuning with public, video classification datasets, we are able to achieve state-of-the-art results for spatio-temporal action localisation on the challenging AVA and AVA-Kinetics datasets, outperforming recent works which develop intricate models.
Augmenting differentiable physics with randomized smoothing
Jun 23, 2022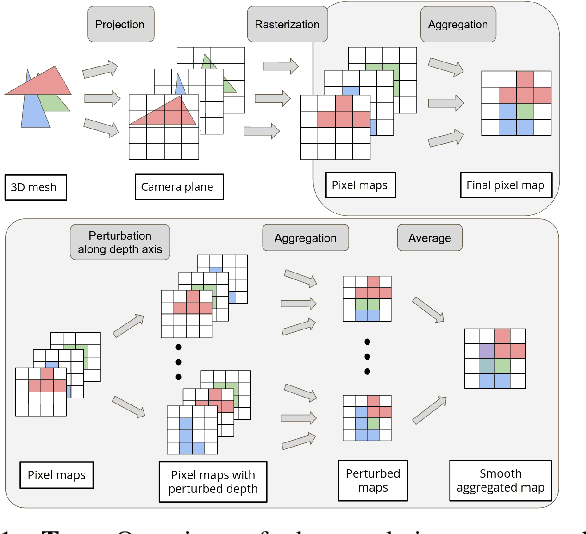
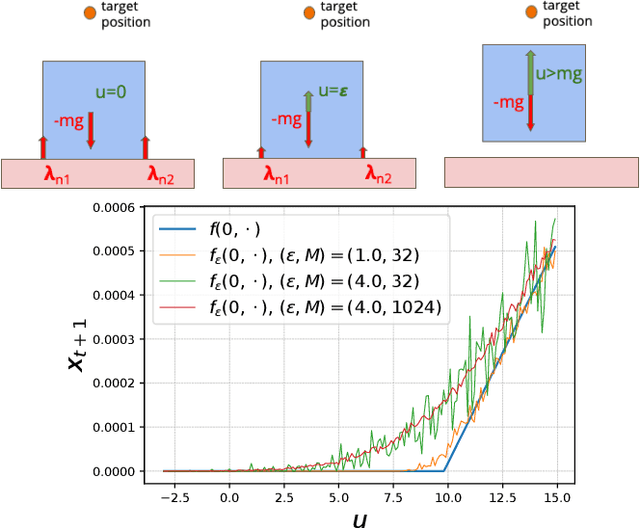

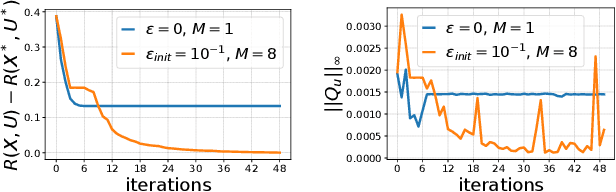
In the past few years, following the differentiable programming paradigm, there has been a growing interest in computing the gradient information of physical processes (e.g., physical simulation, image rendering). However, such processes may be non-differentiable or yield uninformative gradients (i.d., null almost everywhere). When faced with the former pitfalls, gradients estimated via analytical expression or numerical techniques such as automatic differentiation and finite differences, make classical optimization schemes converge towards poor quality solutions. Thus, relying only on the local information provided by these gradients is often not sufficient to solve advanced optimization problems involving such physical processes, notably when they are subject to non-smoothness and non-convexity issues.In this work, inspired by the field of zero-th order optimization, we leverage randomized smoothing to augment differentiable physics by estimating gradients in a neighborhood. Our experiments suggest that integrating this approach inside optimization algorithms may be fruitful for tasks as varied as mesh reconstruction from images or optimal control of robotic systems subject to contact and friction issues.