 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDISCOVERSE: Efficient Robot Simulation in Complex High-Fidelity Environments
Jul 29, 2025We present the first unified, modular, open-source 3DGS-based simulation framework for Real2Sim2Real robot learning. It features a holistic Real2Sim pipeline that synthesizes hyper-realistic geometry and appearance of complex real-world scenarios, paving the way for analyzing and bridging the Sim2Real gap. Powered by Gaussian Splatting and MuJoCo, Discoverse enables massively parallel simulation of multiple sensor modalities and accurate physics, with inclusive supports for existing 3D assets, robot models, and ROS plugins, empowering large-scale robot learning and complex robotic benchmarks. Through extensive experiments on imitation learning, Discoverse demonstrates state-of-the-art zero-shot Sim2Real transfer performance compared to existing simulators. For code and demos: https://air-discoverse.github.io/.
Incorporating Recurrent Reinforcement Learning into Model Predictive Control for Adaptive Control in Autonomous Driving
Jan 30, 2023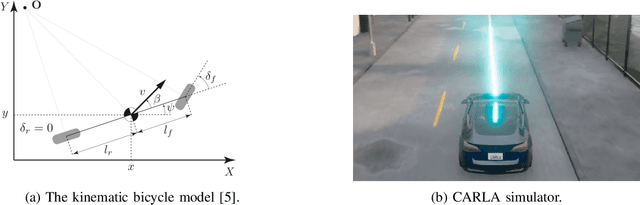
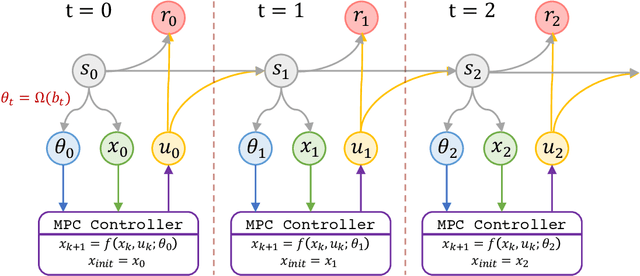
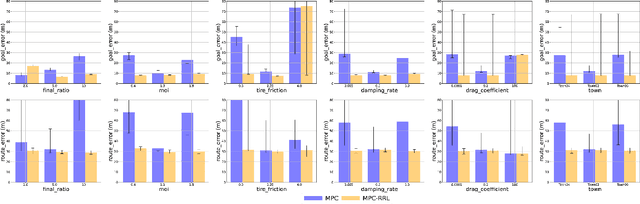

Model Predictive Control (MPC) is attracting tremendous attention in the autonomous driving task as a powerful control technique. The success of an MPC controller strongly depends on an accurate internal dynamics model. However, the static parameters, usually learned by system identification, often fail to adapt to both internal and external perturbations in real-world scenarios. In this paper, we firstly (1) reformulate the problem as a Partially Observed Markov Decision Process (POMDP) that absorbs the uncertainties into observations and maintains Markov property into hidden states; and (2) learn a recurrent policy continually adapting the parameters of the dynamics model via Recurrent Reinforcement Learning (RRL) for optimal and adaptive control; and (3) finally evaluate the proposed algorithm (referred as $\textit{MPC-RRL}$) in CARLA simulator and leading to robust behaviours under a wide range of perturbations.
A High Fidelity Simulation Framework for Potential Safety Benefits Estimation of Cooperative Pedestrian Perception
Oct 18, 2022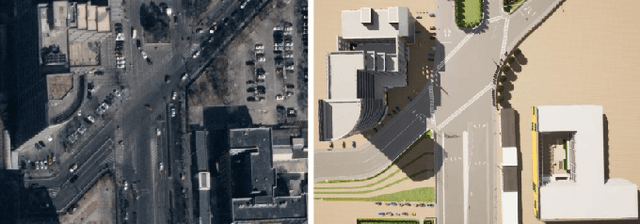
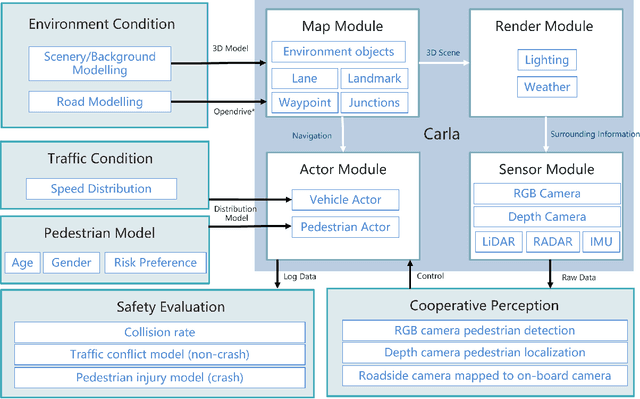
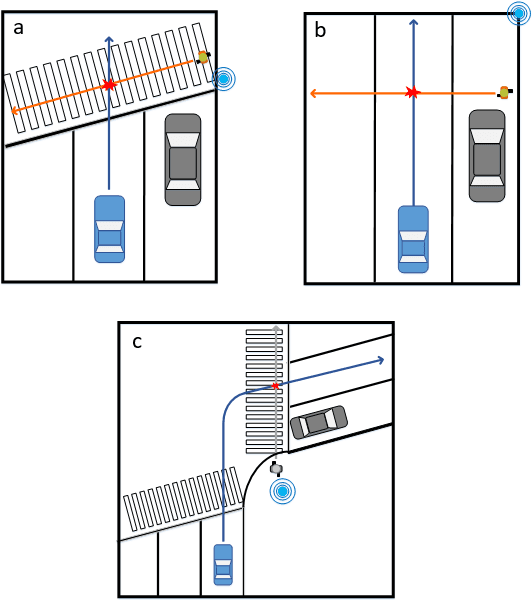
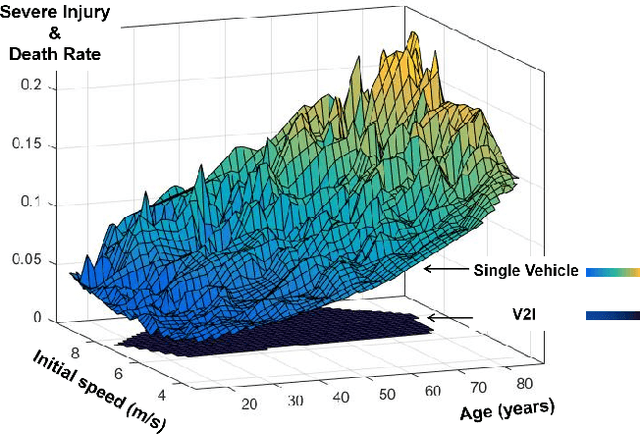
This paper proposes a high-fidelity simulation framework that can estimate the potential safety benefits of vehicle-to-infrastructure (V2I) pedestrian safety strategies. This simulator can support cooperative perception algorithms in the loop by simulating the environmental conditions, traffic conditions, and pedestrian characteristics at the same time. Besides, the benefit estimation model applied in our framework can systematically quantify both the risk conflict (non-crash condition) and the severity of the pedestrian's injuries (crash condition). An experiment was conducted in this paper that built a digital twin of a crowded urban intersection in China. The result shows that our framework is efficient for safety benefit estimation of V2I pedestrian safety strategies.
LATITUDE: Robotic Global Localization with Truncated Dynamic Low-pass Filter in City-scale NeRF
Sep 18, 2022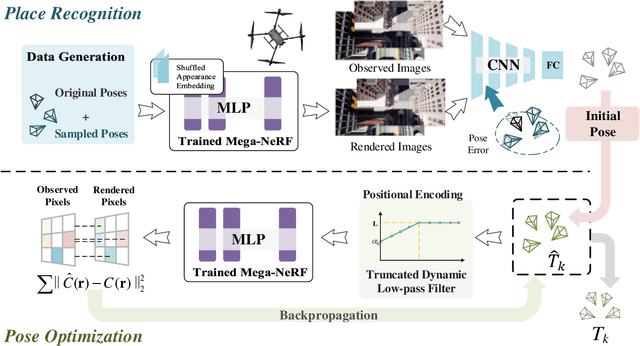
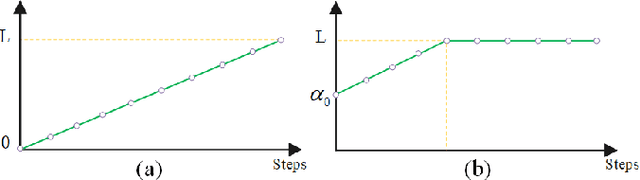
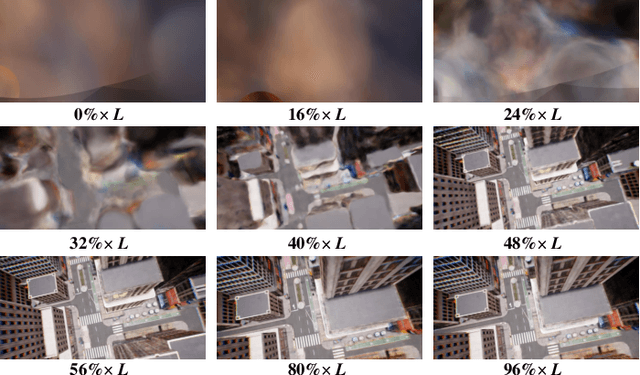
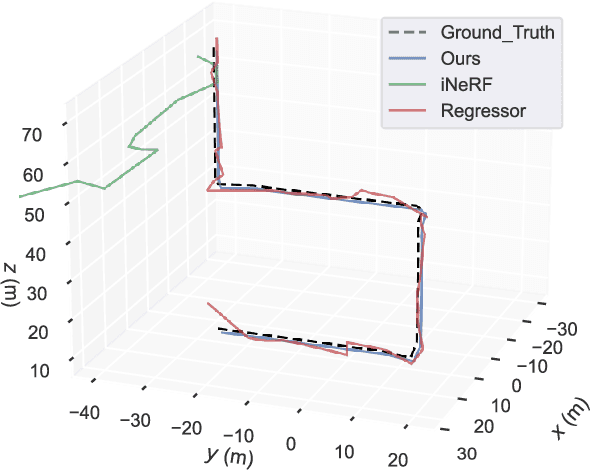
Neural Radiance Fields (NeRFs) have made great success in representing complex 3D scenes with high-resolution details and efficient memory. Nevertheless, current NeRF-based pose estimators have no initial pose prediction and are prone to local optima during optimization. In this paper, we present LATITUDE: Global Localization with Truncated Dynamic Low-pass Filter, which introduces a two-stage localization mechanism in city-scale NeRF. In place recognition stage, we train a regressor through images generated from trained NeRFs, which provides an initial value for global localization. In pose optimization stage, we minimize the residual between the observed image and rendered image by directly optimizing the pose on tangent plane. To avoid convergence to local optimum, we introduce a Truncated Dynamic Low-pass Filter (TDLF) for coarse-to-fine pose registration. We evaluate our method on both synthetic and real-world data and show its potential applications for high-precision navigation in large-scale city scenes. Codes and data will be publicly available at https://github.com/jike5/LATITUDE.