 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Visual Tracking: A New Benchmark and Baseline Approach
Mar 08, 2021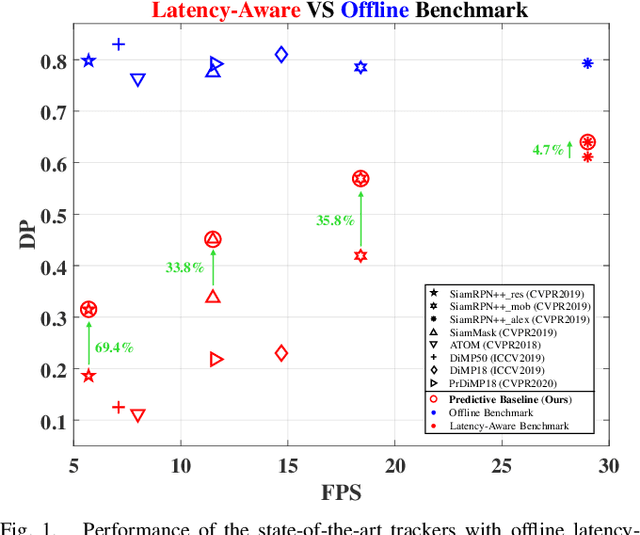
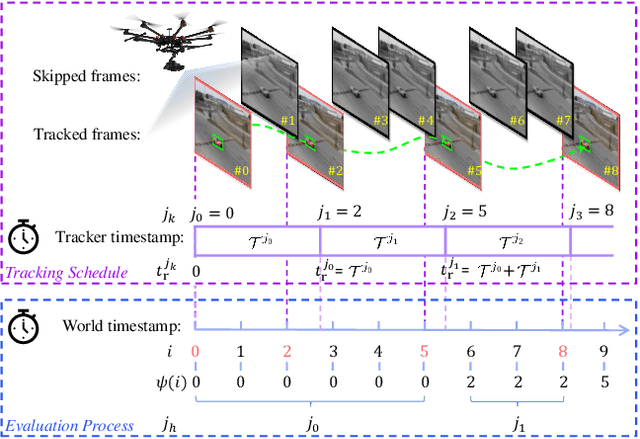
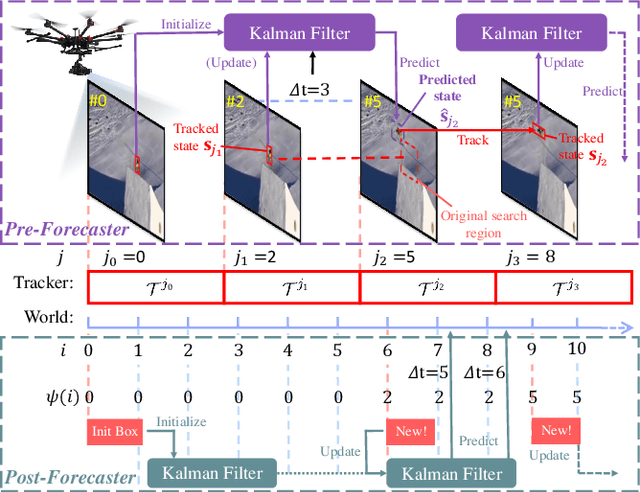
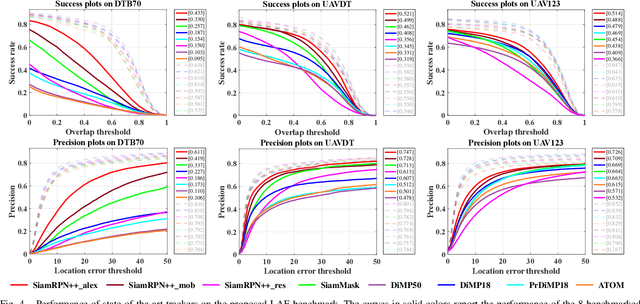
As a crucial robotic perception capability, visual tracking has been intensively studied recently. In the real-world scenarios, the onboard processing time of the image streams inevitably leads to a discrepancy between the tracking results and the real-world states. However, existing visual tracking benchmarks commonly run the trackers offline and ignore such latency in the evaluation. In this work, we aim to deal with a more realistic problem of latency-aware tracking. The state-of-the-art trackers are evaluated in the aerial scenarios with new metrics jointly assessing the tracking accuracy and efficiency. Moreover, a new predictive visual tracking baseline is developed to compensate for the latency stemming from the onboard computation. Our latency-aware benchmark can provide a more realistic evaluation of the trackers for the robotic applications. Besides, exhaustive experiments have proven the effectiveness of the proposed predictive visual tracking baseline approach.
All-Day Object Tracking for Unmanned Aerial Vehicle
Jan 24, 2021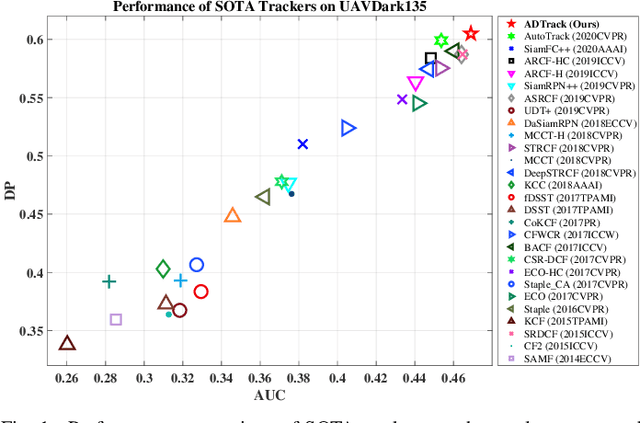
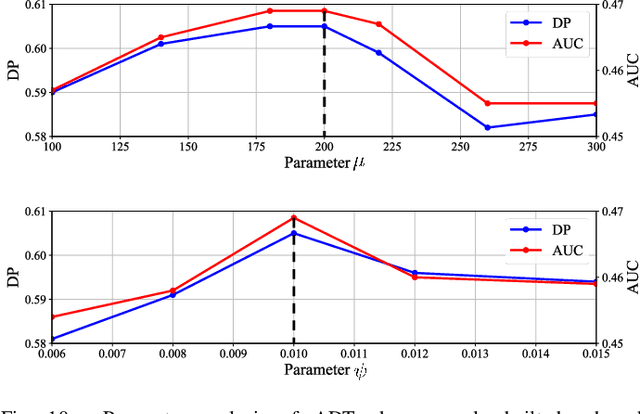
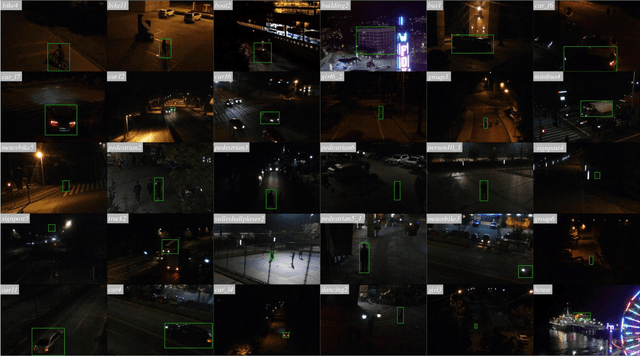
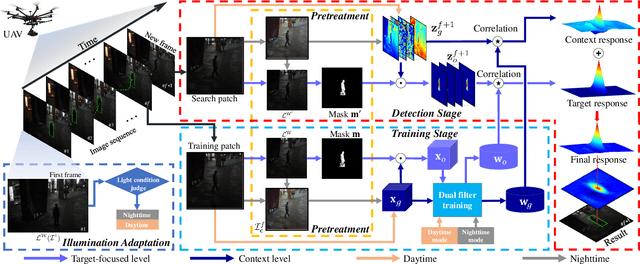
Visual object tracking, which is representing a major interest in image processing field, has facilitated numerous real world applications. Among them, equipping unmanned aerial vehicle (UAV) with real time robust visual trackers for all day aerial maneuver, is currently attracting incremental attention and has remarkably broadened the scope of applications of object tracking. However, prior tracking methods have merely focused on robust tracking in the well-illuminated scenes, while ignoring trackers' capabilities to be deployed in the dark. In darkness, the conditions can be more complex and harsh, easily posing inferior robust tracking or even tracking failure. To this end, this work proposed a novel discriminative correlation filter based tracker with illumination adaptive and anti dark capability, namely ADTrack. ADTrack firstly exploits image illuminance information to enable adaptability of the model to the given light condition. Then, by virtue of an efficient and effective image enhancer, ADTrack carries out image pretreatment, where a target aware mask is generated. Benefiting from the mask, ADTrack aims to solve a dual regression problem where dual filters, i.e., the context filter and target focused filter, are trained with mutual constraint. Thus ADTrack is able to maintain continuously favorable performance in all-day conditions. Besides, this work also constructed one UAV nighttime tracking benchmark UAVDark135, comprising of more than 125k manually annotated frames, which is also very first UAV nighttime tracking benchmark. Exhaustive experiments are extended on authoritative daytime benchmarks, i.e., UAV123 10fps, DTB70, and the newly built dark benchmark UAVDark135, which have validated the superiority of ADTrack in both bright and dark conditions on a single CPU.
Siamese Anchor Proposal Network for High-Speed Aerial Tracking
Dec 19, 2020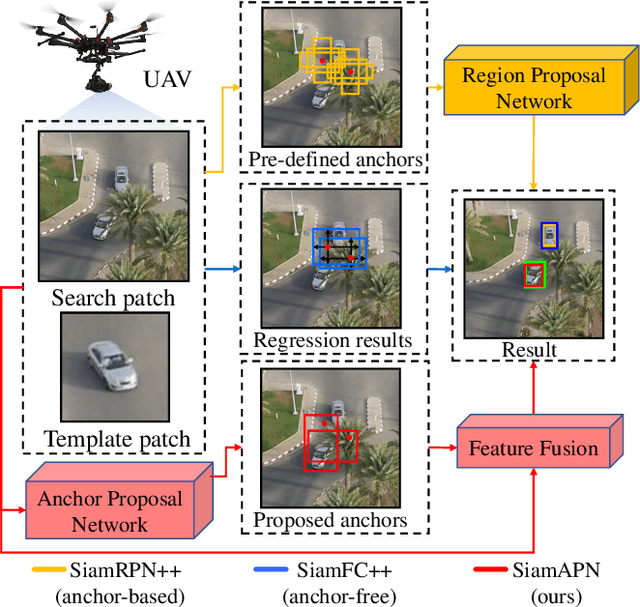
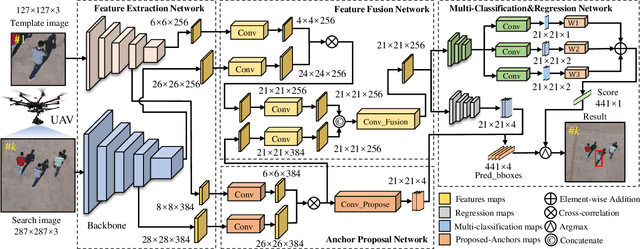
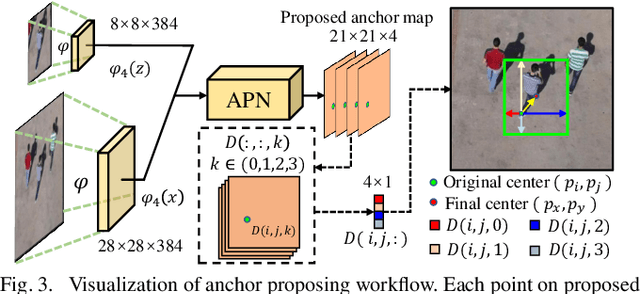
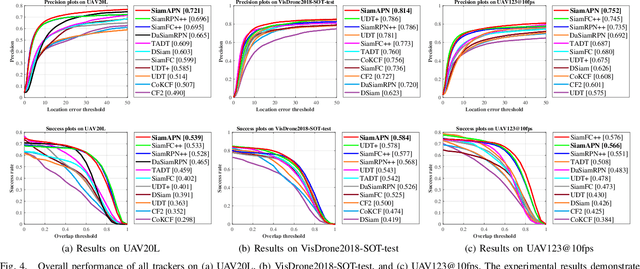
In the domain of visual tracking, most deep learning-based trackers highlight the accuracy but casting aside efficiency, thereby impeding their real-world deployment on mobile platforms like the unmanned aerial vehicle (UAV). In this work, a novel two-stage siamese network-based method is proposed for aerial tracking, \textit{i.e.}, stage-1 for high-quality anchor proposal generation, stage-2 for refining the anchor proposal. Different from anchor-based methods with numerous pre-defined fixed-sized anchors, our no-prior method can 1) make tracker robust and general to different objects with various sizes, especially to small, occluded, and fast-moving objects, under complex scenarios in light of the adaptive anchor generation, 2) make calculation feasible due to the substantial decrease of anchor numbers. In addition, compared to anchor-free methods, our framework has better performance owing to refinement at stage-2. Comprehensive experiments on three benchmarks have proven the state-of-the-art performance of our approach, with a speed of around 200 frames/s.
Correlation Filter for UAV-Based Aerial Tracking: A Review and Experimental Evaluation
Oct 31, 2020
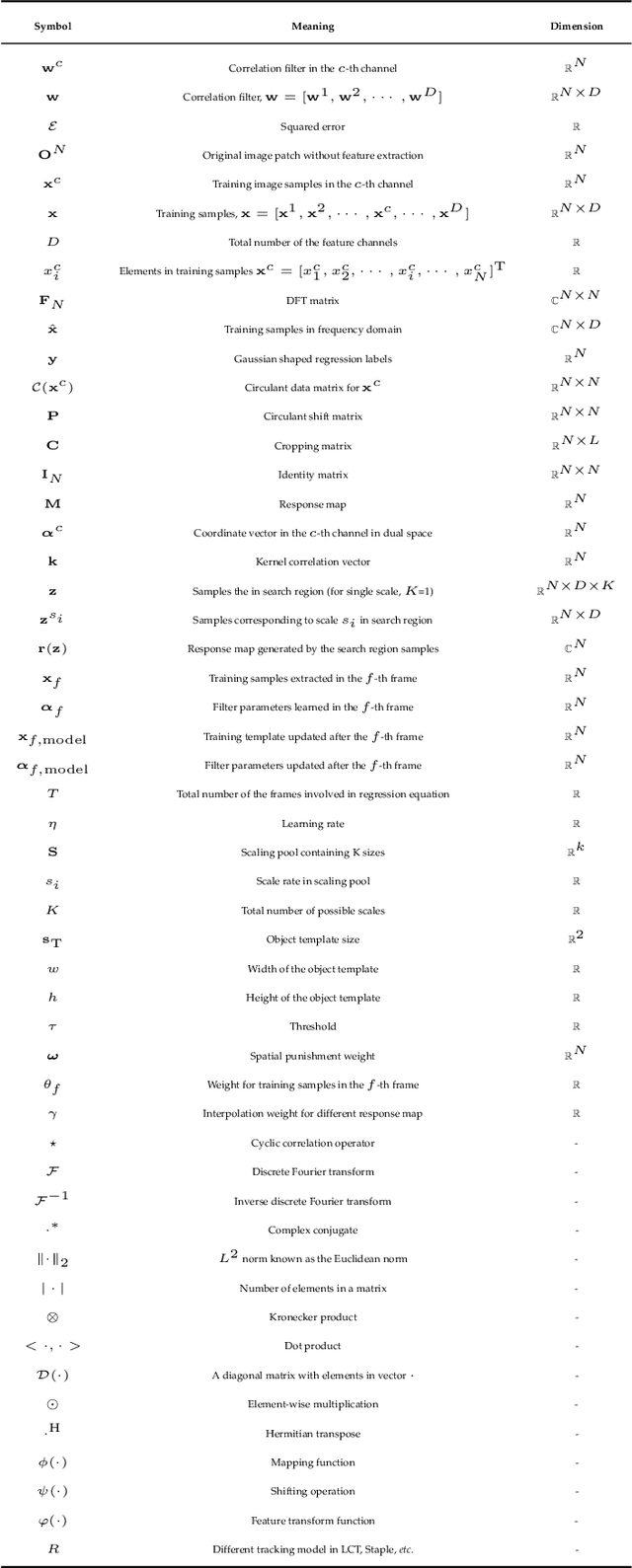
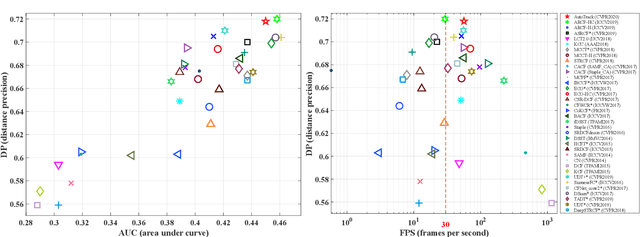
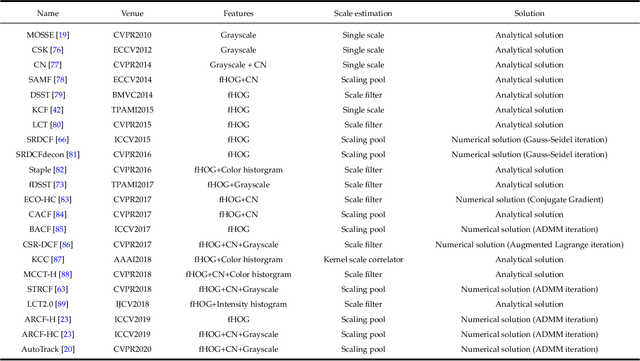
Aerial tracking, which has exhibited its omnipresent dedication and splendid performance, is one of the most active applications in the remote sensing field. Especially, unmanned aerial vehicle (UAV)-based remote sensing system, equipped with a visual tracking approach, has been widely used in aviation, navigation, agriculture, transportation, and public security, etc. As is mentioned above, the UAV-based aerial tracking platform has been gradually developed from research to practical application stage, reaching one of the main aerial remote sensing technologies in the future. However, due to real-world challenging situations, the vibration of the UAV's mechanical structure (especially under strong wind conditions), and limited computation resources, accuracy, robustness, and high efficiency are all crucial for the onboard tracking methods. Recently, the discriminative correlation filter (DCF)-based trackers have stood out for their high computational efficiency and appealing robustness on a single CPU, and have flourished in the UAV visual tracking community. In this work, the basic framework of the DCF-based trackers is firstly generalized, based on which, 20 state-of-the-art DCF-based trackers are orderly summarized according to their innovations for soloving various issues. Besides, exhaustive and quantitative experiments have been extended on various prevailing UAV tracking benchmarks, i.e., UAV123, UAV123_10fps, UAV20L, UAVDT, DTB70, and VisDrone2019-SOT, which contain 371,625 frames in total. The experiments show the performance, verify the feasibility, and demonstrate the current challenges of DCF-based trackers onboard UAV tracking. Finally, comprehensive conclusions on open challenges and directions for future research is presented.
Towards Robust Visual Tracking for Unmanned Aerial Vehicle with Tri-Attentional Correlation Filters
Aug 30, 2020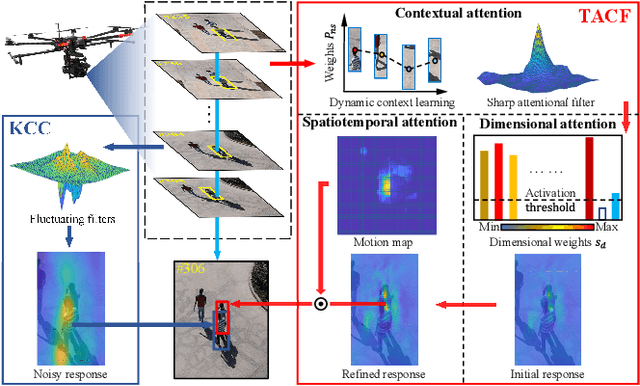
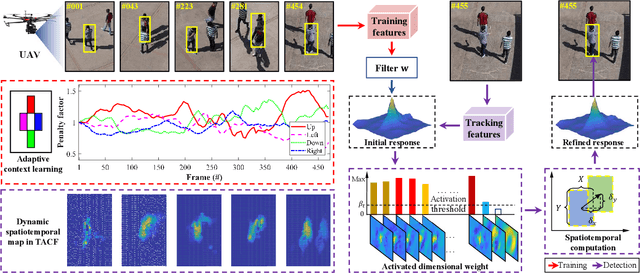
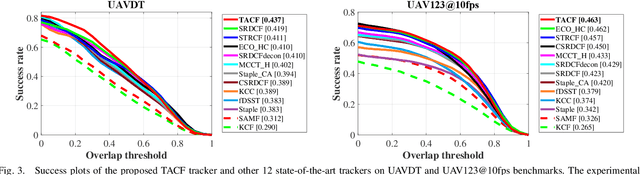
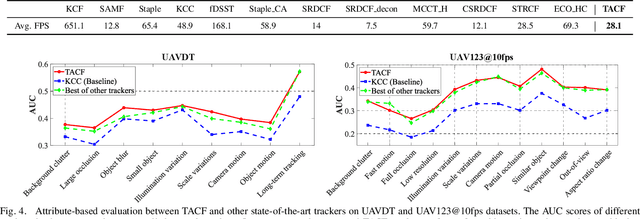
Object tracking has been broadly applied in unmanned aerial vehicle (UAV) tasks in recent years. However, existing algorithms still face difficulties such as partial occlusion, clutter background, and other challenging visual factors. Inspired by the cutting-edge attention mechanisms, a novel object tracking framework is proposed to leverage multi-level visual attention. Three primary attention, i.e., contextual attention, dimensional attention, and spatiotemporal attention, are integrated into the training and detection stages of correlation filter-based tracking pipeline. Therefore, the proposed tracker is equipped with robust discriminative power against challenging factors while maintaining high operational efficiency in UAV scenarios. Quantitative and qualitative experiments on two well-known benchmarks with 173 challenging UAV video sequences demonstrate the effectiveness of the proposed framework. The proposed tracking algorithm favorably outperforms 12 state-of-the-art methods, yielding 4.8% relative gain in UAVDT and 8.2% relative gain in UAV123@10fps against the baseline tracker while operating at the speed of $\sim$ 28 frames per second.
* IROS'20 accepted, 8 pages, 6 figures, and 2 tables
Automatic Failure Recovery and Re-Initialization for Online UAV Tracking with Joint Scale and Aspect Ratio Optimization
Aug 10, 2020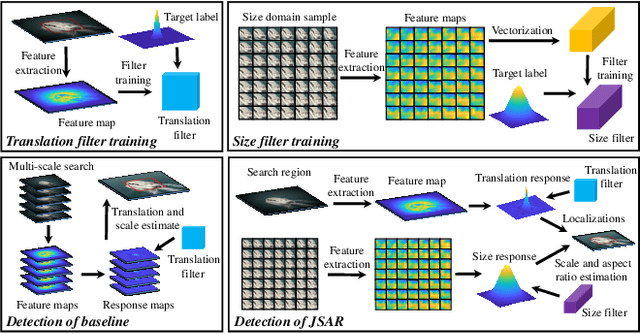
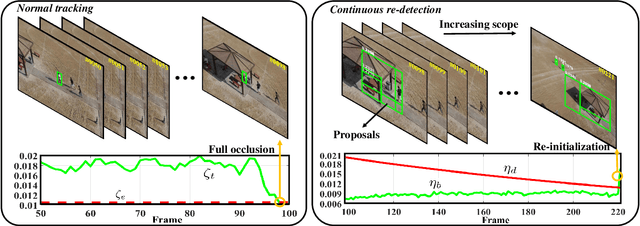
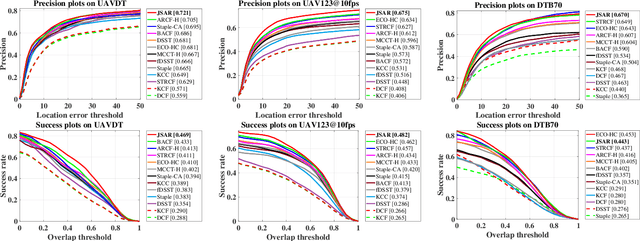
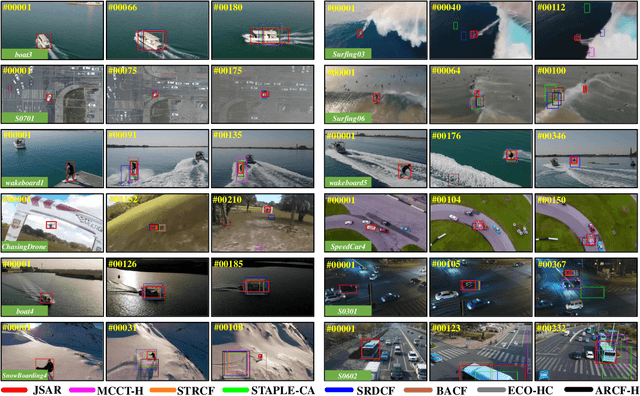
Current unmanned aerial vehicle (UAV) visual tracking algorithms are primarily limited with respect to: (i) the kind of size variation they can deal with, (ii) the implementation speed which hardly meets the real-time requirement. In this work, a real-time UAV tracking algorithm with powerful size estimation ability is proposed. Specifically, the overall tracking task is allocated to two 2D filters: (i) translation filter for location prediction in the space domain, (ii) size filter for scale and aspect ratio optimization in the size domain. Besides, an efficient two-stage re-detection strategy is introduced for long-term UAV tracking tasks. Large-scale experiments on four UAV benchmarks demonstrate the superiority of the presented method which has computation feasibility on a low-cost CPU.
DR^2Track: Towards Real-Time Visual Tracking for UAV via Distractor Repressed Dynamic Regression
Aug 10, 2020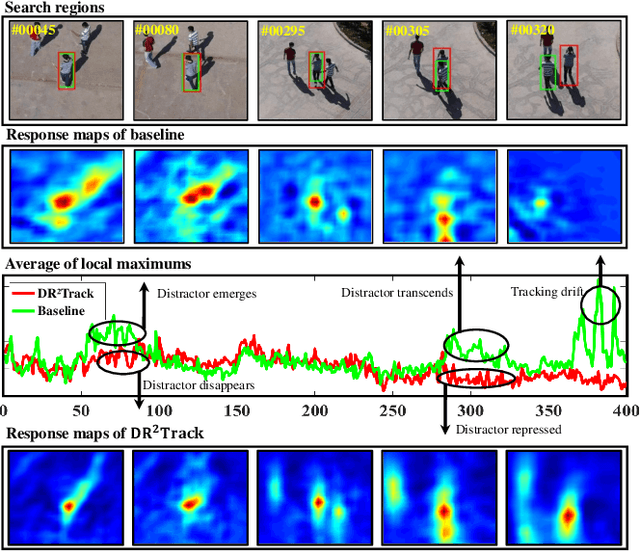
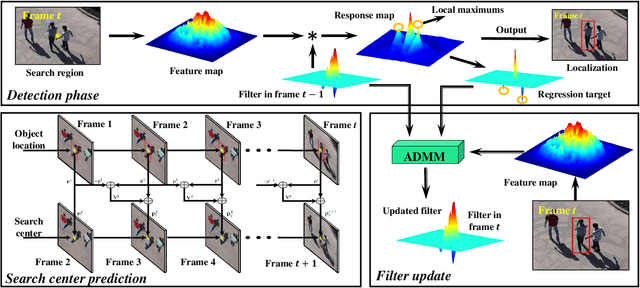
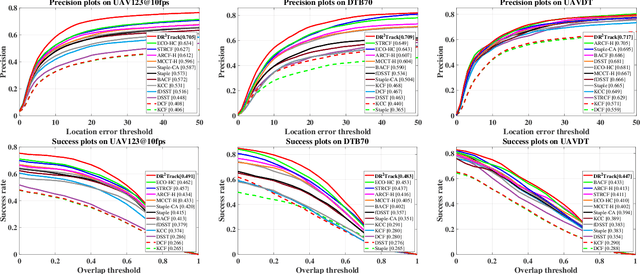
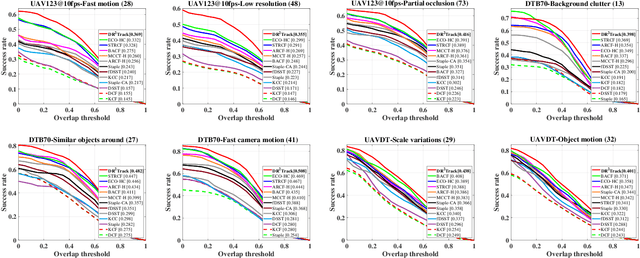
Visual tracking has yielded promising applications with unmanned aerial vehicle (UAV). In literature, the advanced discriminative correlation filter (DCF) type trackers generally distinguish the foreground from the background with a learned regressor which regresses the implicit circulated samples into a fixed target label. However, the predefined and unchanged regression target results in low robustness and adaptivity to uncertain aerial tracking scenarios. In this work, we exploit the local maximum points of the response map generated in the detection phase to automatically locate current distractors. By repressing the response of distractors in the regressor learning, we can dynamically and adaptively alter our regression target to leverage the tracking robustness as well as adaptivity. Substantial experiments conducted on three challenging UAV benchmarks demonstrate both excellent performance and extraordinary speed (~50fps on a cheap CPU) of our tracker.
Learning Consistency Pursued Correlation Filters for Real-Time UAV Tracking
Aug 09, 2020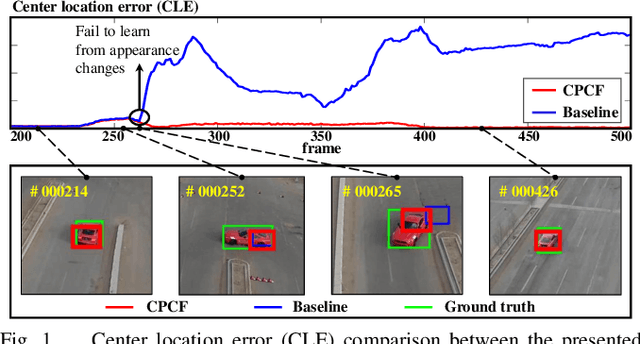
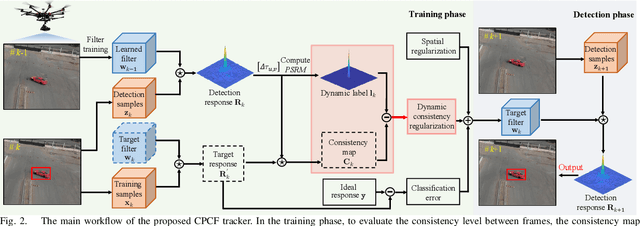
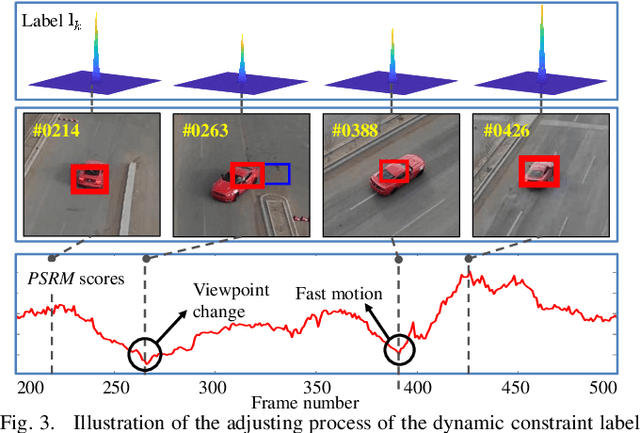
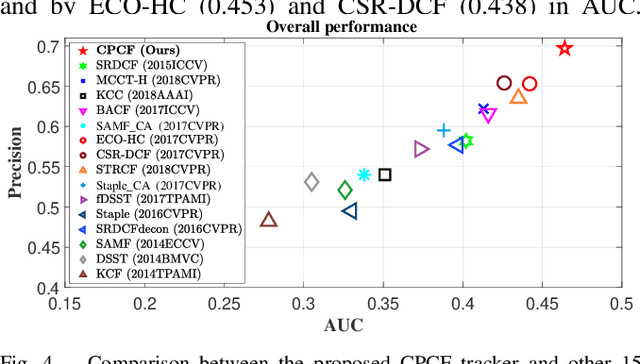
Correlation filter (CF)-based methods have demonstrated exceptional performance in visual object tracking for unmanned aerial vehicle (UAV) applications, but suffer from the undesirable boundary effect. To solve this issue, spatially regularized correlation filters (SRDCF) proposes the spatial regularization to penalize filter coefficients, thereby significantly improving the tracking performance. However, the temporal information hidden in the response maps is not considered in SRDCF, which limits the discriminative power and the robustness for accurate tracking. This work proposes a novel approach with dynamic consistency pursued correlation filters, i.e., the CPCF tracker. Specifically, through a correlation operation between adjacent response maps, a practical consistency map is generated to represent the consistency level across frames. By minimizing the difference between the practical and the scheduled ideal consistency map, the consistency level is constrained to maintain temporal smoothness, and rich temporal information contained in response maps is introduced. Besides, a dynamic constraint strategy is proposed to further improve the adaptability of the proposed tracker in complex situations. Comprehensive experiments are conducted on three challenging UAV benchmarks, i.e., UAV123@10FPS, UAVDT, and DTB70. Based on the experimental results, the proposed tracker favorably surpasses the other 25 state-of-the-art trackers with real-time running speed ($\sim$43FPS) on a single CPU.
* IROS 2020 accepted, 8 pages, 7 figures, and 2 tables
AutoTrack: Towards High-Performance Visual Tracking for UAV with Automatic Spatio-Temporal Regularization
Mar 29, 2020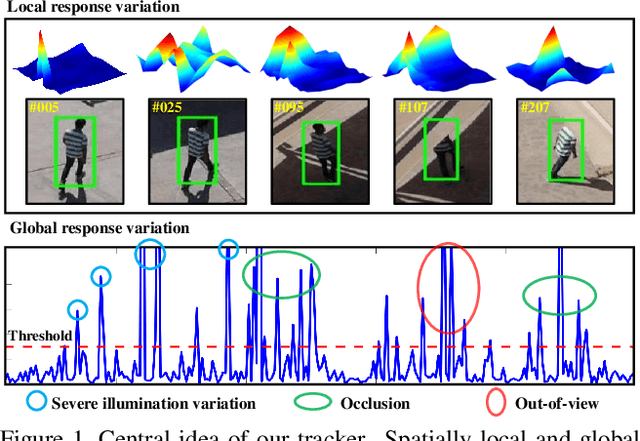
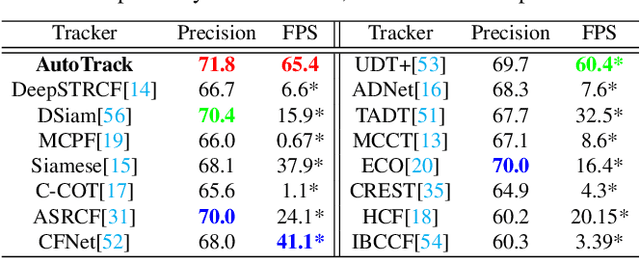
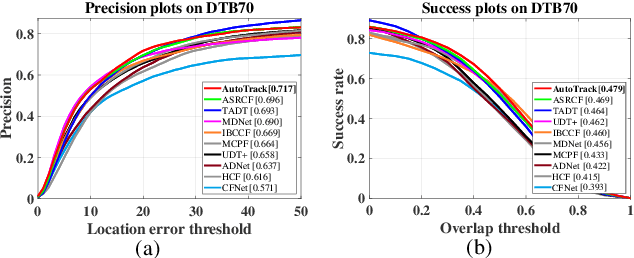

Most existing trackers based on discriminative correlation filters (DCF) try to introduce predefined regularization term to improve the learning of target objects, e.g., by suppressing background learning or by restricting change rate of correlation filters. However, predefined parameters introduce much effort in tuning them and they still fail to adapt to new situations that the designer did not think of. In this work, a novel approach is proposed to online automatically and adaptively learn spatio-temporal regularization term. Spatially local response map variation is introduced as spatial regularization to make DCF focus on the learning of trust-worthy parts of the object, and global response map variation determines the updating rate of the filter. Extensive experiments on four UAV benchmarks have proven the superiority of our method compared to the state-of-the-art CPU- and GPU-based trackers, with a speed of ~60 frames per second running on a single CPU. Our tracker is additionally proposed to be applied in UAV localization. Considerable tests in the indoor practical scenarios have proven the effectiveness and versatility of our localization method. The code is available at https://github.com/vision4robotics/AutoTrack.
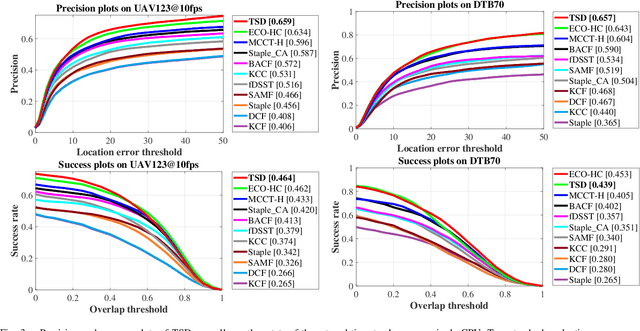
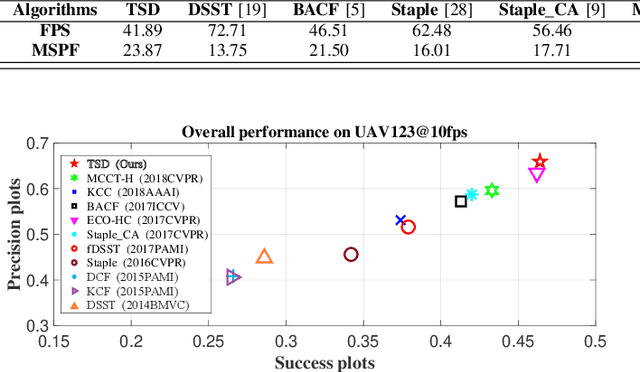
Training-Set Distillation for Real-Time UAV Object Tracking
Mar 11, 2020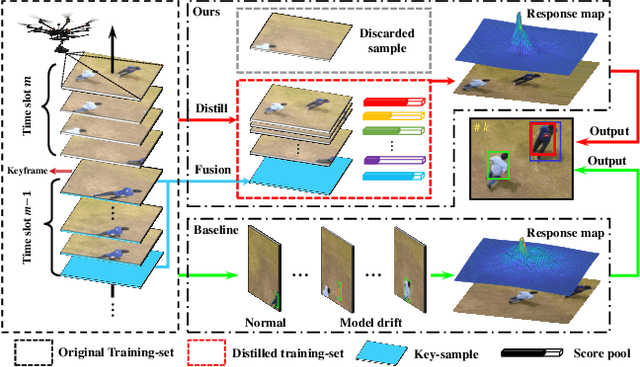
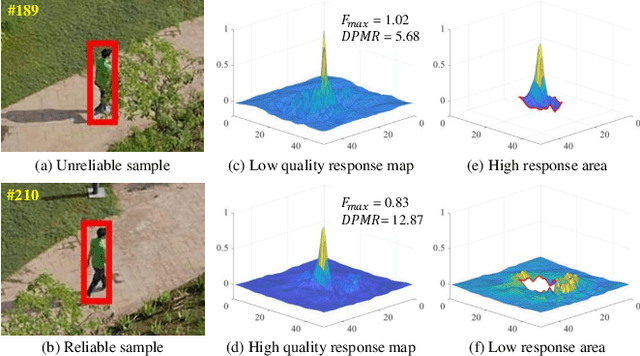
Correlation filter (CF) has recently exhibited promising performance in visual object tracking for unmanned aerial vehicle (UAV). Such online learning method heavily depends on the quality of the training-set, yet complicated aerial scenarios like occlusion or out of view can reduce its reliability. In this work, a novel time slot-based distillation approach is proposed to efficiently and effectively optimize the training-set's quality on the fly. A cooperative energy minimization function is established to score the historical samples adaptively. To accelerate the scoring process, frames with high confident tracking results are employed as the keyframes to divide the tracking process into multiple time slots. After the establishment of a new slot, the weighted fusion of the previous samples generates one key-sample, in order to reduce the number of samples to be scored. Besides, when the current time slot exceeds the maximum frame number, which can be scored, the sample with the lowest score will be discarded. Consequently, the training-set can be efficiently and reliably distilled. Comprehensive tests on two well-known UAV benchmarks prove the effectiveness of our method with real-time speed on a single CPU.