 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAPIR: Tracking Any Point with per-frame Initialization and temporal Refinement
Jun 14, 2023We present a novel model for Tracking Any Point (TAP) that effectively tracks any queried point on any physical surface throughout a video sequence. Our approach employs two stages: (1) a matching stage, which independently locates a suitable candidate point match for the query point on every other frame, and (2) a refinement stage, which updates both the trajectory and query features based on local correlations. The resulting model surpasses all baseline methods by a significant margin on the TAP-Vid benchmark, as demonstrated by an approximate 20% absolute average Jaccard (AJ) improvement on DAVIS. Our model facilitates fast inference on long and high-resolution video sequences. On a modern GPU, our implementation has the capacity to track points faster than real-time. Visualizations, source code, and pretrained models can be found on our project webpage.
Perception Test: A Diagnostic Benchmark for Multimodal Video Models
May 23, 2023



We propose a novel multimodal video benchmark - the Perception Test - to evaluate the perception and reasoning skills of pre-trained multimodal models (e.g. Flamingo, BEiT-3, or GPT-4). Compared to existing benchmarks that focus on computational tasks (e.g. classification, detection or tracking), the Perception Test focuses on skills (Memory, Abstraction, Physics, Semantics) and types of reasoning (descriptive, explanatory, predictive, counterfactual) across video, audio, and text modalities, to provide a comprehensive and efficient evaluation tool. The benchmark probes pre-trained models for their transfer capabilities, in a zero-shot / few-shot or limited finetuning regime. For these purposes, the Perception Test introduces 11.6k real-world videos, 23s average length, designed to show perceptually interesting situations, filmed by around 100 participants worldwide. The videos are densely annotated with six types of labels (multiple-choice and grounded video question-answers, object and point tracks, temporal action and sound segments), enabling both language and non-language evaluations. The fine-tuning and validation splits of the benchmark are publicly available (CC-BY license), in addition to a challenge server with a held-out test split. Human baseline results compared to state-of-the-art video QA models show a significant gap in performance (91.4% vs 43.6%), suggesting that there is significant room for improvement in multimodal video understanding. Dataset, baselines code, and challenge server are available at https://github.com/deepmind/perception_test
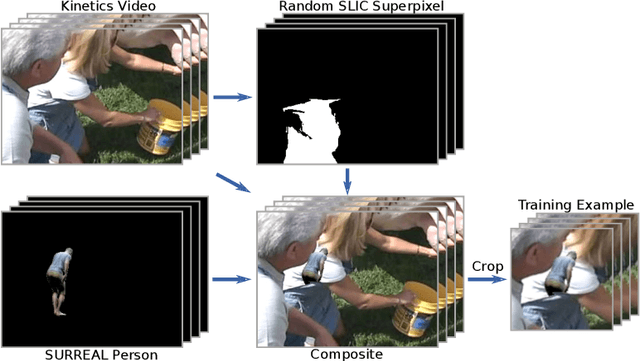
TAP-Vid: A Benchmark for Tracking Any Point in a Video
Nov 07, 2022Generic motion understanding from video involves not only tracking objects, but also perceiving how their surfaces deform and move. This information is useful to make inferences about 3D shape, physical properties and object interactions. While the problem of tracking arbitrary physical points on surfaces over longer video clips has received some attention, no dataset or benchmark for evaluation existed, until now. In this paper, we first formalize the problem, naming it tracking any point (TAP). We introduce a companion benchmark, TAP-Vid, which is composed of both real-world videos with accurate human annotations of point tracks, and synthetic videos with perfect ground-truth point tracks. Central to the construction of our benchmark is a novel semi-automatic crowdsourced pipeline which uses optical flow estimates to compensate for easier, short-term motion like camera shake, allowing annotators to focus on harder sections of video. We validate our pipeline on synthetic data and propose a simple end-to-end point tracking model TAP-Net, showing that it outperforms all prior methods on our benchmark when trained on synthetic data.
Kubric: A scalable dataset generator
Mar 07, 2022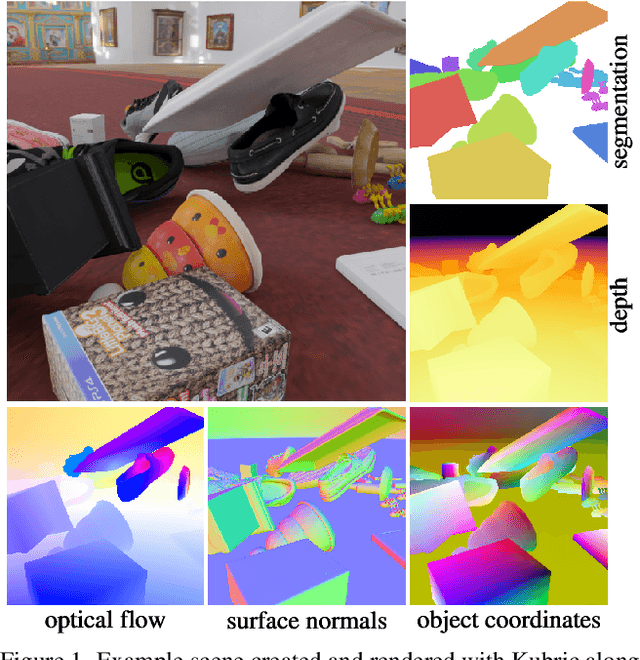
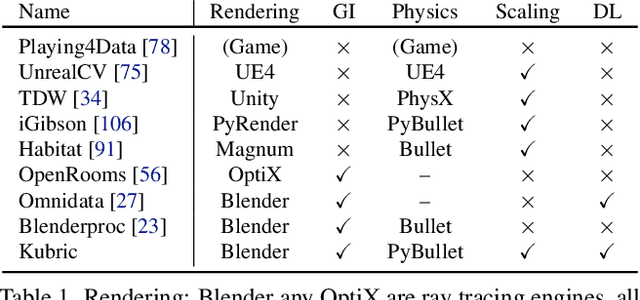
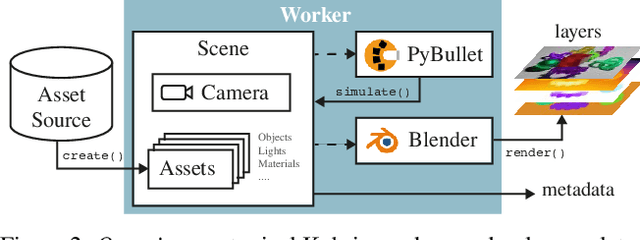
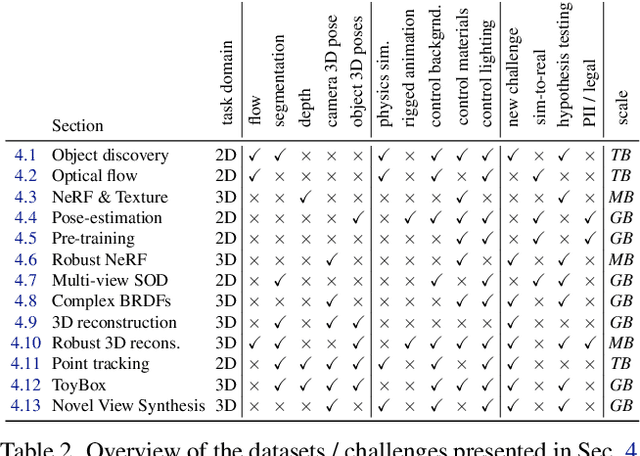
Data is the driving force of machine learning, with the amount and quality of training data often being more important for the performance of a system than architecture and training details. But collecting, processing and annotating real data at scale is difficult, expensive, and frequently raises additional privacy, fairness and legal concerns. Synthetic data is a powerful tool with the potential to address these shortcomings: 1) it is cheap 2) supports rich ground-truth annotations 3) offers full control over data and 4) can circumvent or mitigate problems regarding bias, privacy and licensing. Unfortunately, software tools for effective data generation are less mature than those for architecture design and training, which leads to fragmented generation efforts. To address these problems we introduce Kubric, an open-source Python framework that interfaces with PyBullet and Blender to generate photo-realistic scenes, with rich annotations, and seamlessly scales to large jobs distributed over thousands of machines, and generating TBs of data. We demonstrate the effectiveness of Kubric by presenting a series of 13 different generated datasets for tasks ranging from studying 3D NeRF models to optical flow estimation. We release Kubric, the used assets, all of the generation code, as well as the rendered datasets for reuse and modification.
Input-level Inductive Biases for 3D Reconstruction
Dec 06, 2021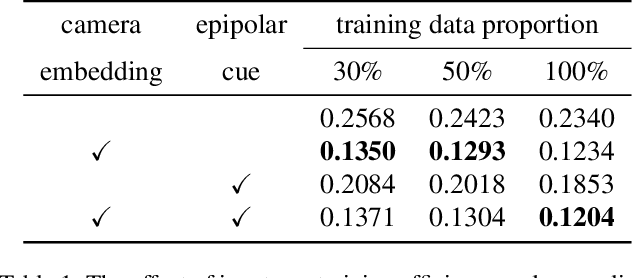
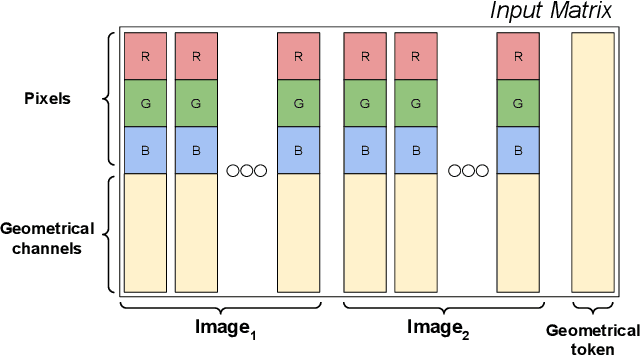
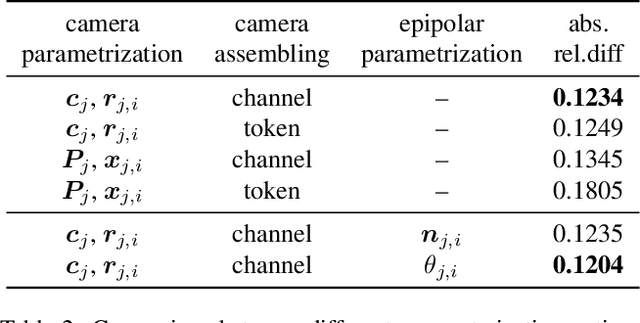
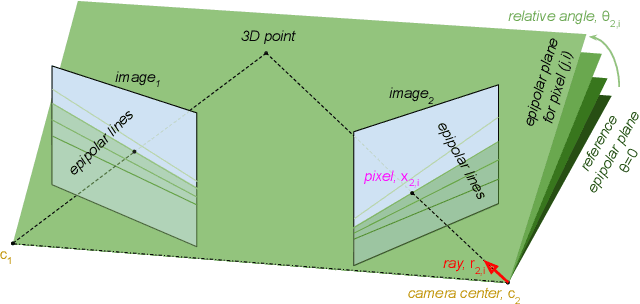
Much of the recent progress in 3D vision has been driven by the development of specialized architectures that incorporate geometrical inductive biases. In this paper we tackle 3D reconstruction using a domain agnostic architecture and study how instead to inject the same type of inductive biases directly as extra inputs to the model. This approach makes it possible to apply existing general models, such as Perceivers, on this rich domain, without the need for architectural changes, while simultaneously maintaining data efficiency of bespoke models. In particular we study how to encode cameras, projective ray incidence and epipolar geometry as model inputs, and demonstrate competitive multi-view depth estimation performance on multiple benchmarks.
Perceiver IO: A General Architecture for Structured Inputs & Outputs
Aug 02, 2021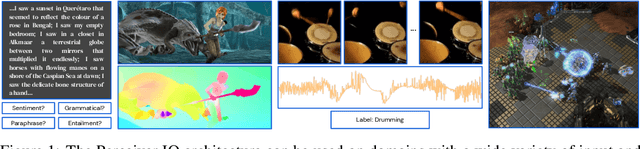
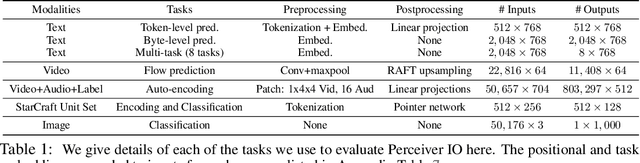
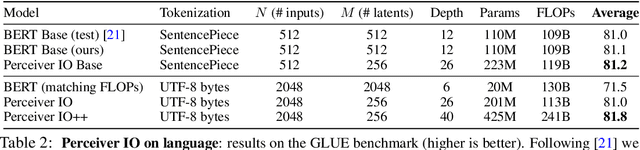
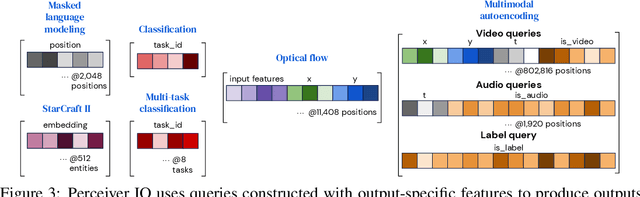
The recently-proposed Perceiver model obtains good results on several domains (images, audio, multimodal, point clouds) while scaling linearly in compute and memory with the input size. While the Perceiver supports many kinds of inputs, it can only produce very simple outputs such as class scores. Perceiver IO overcomes this limitation without sacrificing the original's appealing properties by learning to flexibly query the model's latent space to produce outputs of arbitrary size and semantics. Perceiver IO still decouples model depth from data size and still scales linearly with data size, but now with respect to both input and output sizes. The full Perceiver IO model achieves strong results on tasks with highly structured output spaces, such as natural language and visual understanding, StarCraft II, and multi-task and multi-modal domains. As highlights, Perceiver IO matches a Transformer-based BERT baseline on the GLUE language benchmark without the need for input tokenization and achieves state-of-the-art performance on Sintel optical flow estimation.
Inferring a Continuous Distribution of Atom Coordinates from Cryo-EM Images using VAEs
Jun 26, 2021
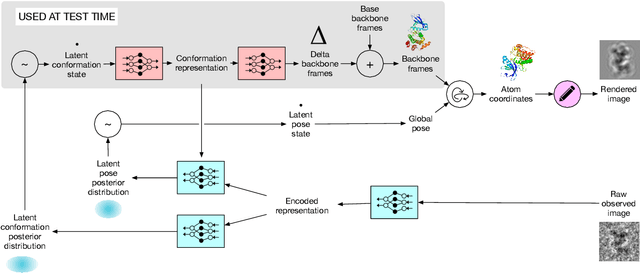
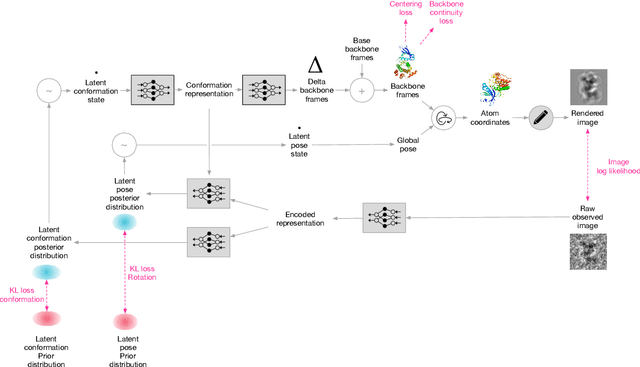
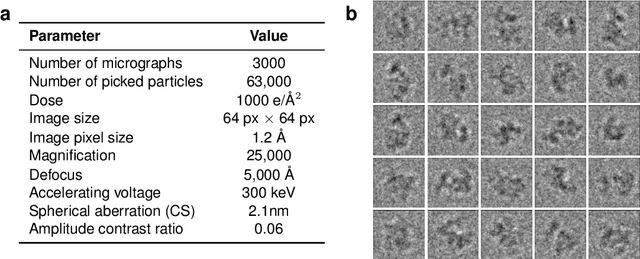
Cryo-electron microscopy (cryo-EM) has revolutionized experimental protein structure determination. Despite advances in high resolution reconstruction, a majority of cryo-EM experiments provide either a single state of the studied macromolecule, or a relatively small number of its conformations. This reduces the effectiveness of the technique for proteins with flexible regions, which are known to play a key role in protein function. Recent methods for capturing conformational heterogeneity in cryo-EM data model it in volume space, making recovery of continuous atomic structures challenging. Here we present a fully deep-learning-based approach using variational auto-encoders (VAEs) to recover a continuous distribution of atomic protein structures and poses directly from picked particle images and demonstrate its efficacy on realistic simulated data. We hope that methods built on this work will allow incorporation of stronger prior information about protein structure and enable better understanding of non-rigid protein structures.
CrossTransformers: spatially-aware few-shot transfer
Jul 23, 2020
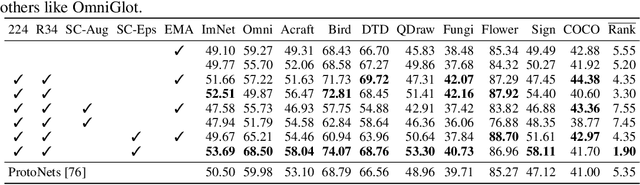
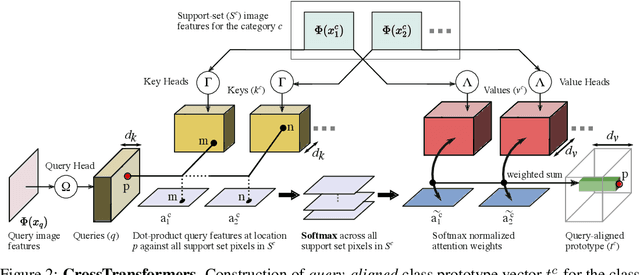
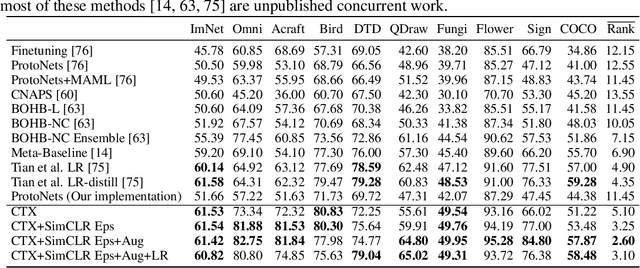
Given new tasks with very little data--such as new classes in a classification problem or a domain shift in the input--performance of modern vision systems degrades remarkably quickly. In this work, we illustrate how the neural network representations which underpin modern vision systems are subject to supervision collapse, whereby they lose any information that is not necessary for performing the training task, including information that may be necessary for transfer to new tasks or domains. We then propose two methods to mitigate this problem. First, we employ self-supervised learning to encourage general-purpose features that transfer better. Second, we propose a novel Transformer based neural network architecture called CrossTransformers, which can take a small number of labeled images and an unlabeled query, find coarse spatial correspondence between the query and the labeled images, and then infer class membership by computing distances between spatially-corresponding features. The result is a classifier that is more robust to task and domain shift, which we demonstrate via state-of-the-art performance on Meta-Dataset, a recent dataset for evaluating transfer from ImageNet to many other vision datasets.
Bootstrap Your Own Latent: A New Approach to Self-Supervised Learning
Jun 13, 2020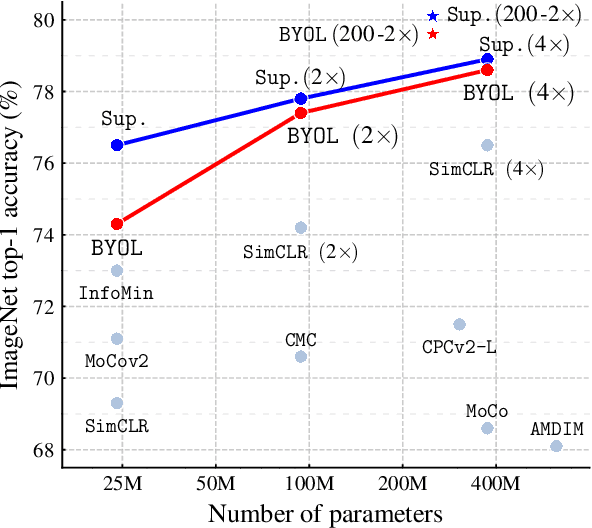
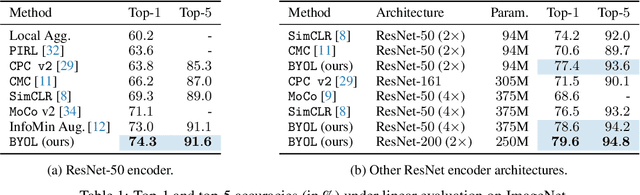
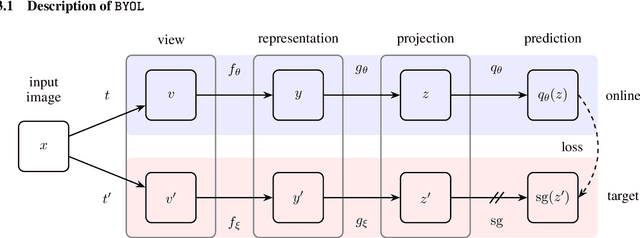
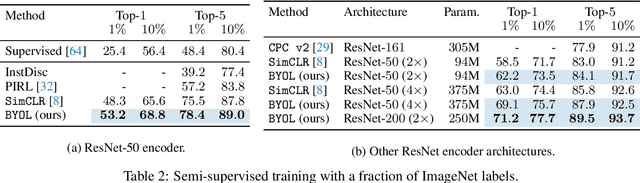
We introduce Bootstrap Your Own Latent (BYOL), a new approach to self-supervised image representation learning. BYOL relies on two neural networks, referred to as online and target networks, that interact and learn from each other. From an augmented view of an image, we train the online network to predict the target network representation of the same image under a different augmented view. At the same time, we update the target network with a slow-moving average of the online network. While state-of-the art methods intrinsically rely on negative pairs, BYOL achieves a new state of the art without them. BYOL reaches $74.3\%$ top-1 classification accuracy on ImageNet using the standard linear evaluation protocol with a ResNet-50 architecture and $79.6\%$ with a larger ResNet. We show that BYOL performs on par or better than the current state of the art on both transfer and semi-supervised benchmarks.
Sim2real transfer learning for 3D pose estimation: motion to the rescue
Jul 04, 2019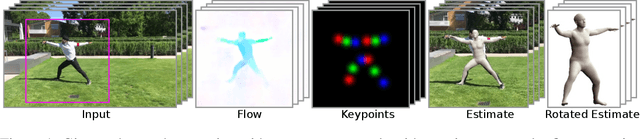
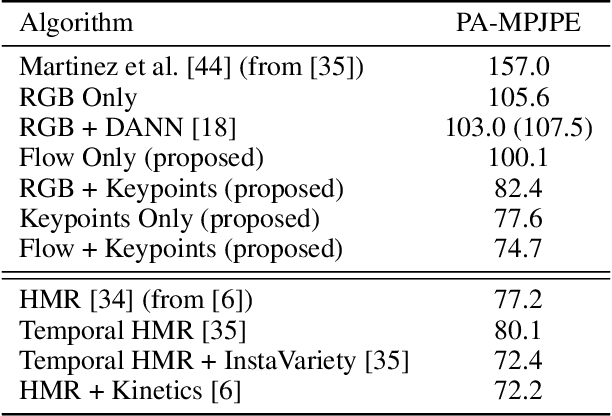

Simulation is an anonymous, low-bias source of data where annotation can often be done automatically; however, for some tasks, current models trained on synthetic data generalize poorly to real data. The task of 3D human pose estimation is a particularly interesting example of this sim2real problem, because learning-based approaches perform reasonably well given real training data, yet labeled 3D poses are extremely difficult to obtain in the wild, limiting scalability. In this paper, we show that standard neural-network approaches, which perform poorly when trained on synthetic RGB images, can perform well when the data is pre-processed to extract cues about the person's motion, notably as optical flow and the motion of 2D keypoints. Therefore, our results suggest that motion can be a simple way to bridge a sim2real gap when video is available. We evaluate on the 3D Poses in the Wild dataset, the most challenging modern standard of 3D pose estimation, where we show full 3D mesh recovery that is on par with state-of-the-art methods trained on real 3D sequences, despite training only on synthetic humans from the SURREAL dataset.