 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Completion via Deep Basis Fitting
Dec 21, 2019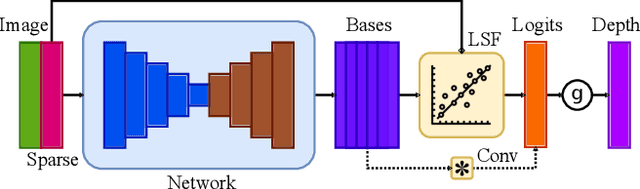
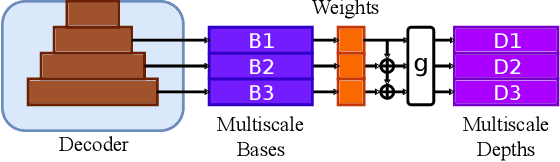
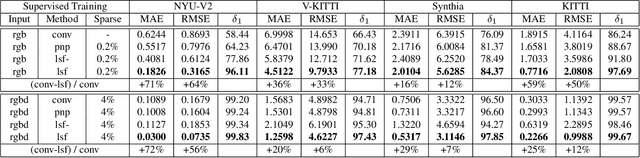
In this paper we consider the task of image-guided depth completion where our system must infer the depth at every pixel of an input image based on the image content and a sparse set of depth measurements. We propose a novel approach that builds upon the strengths of modern deep learning techniques and classical optimization algorithms and significantly improves performance. The proposed method replaces the final $1\times 1$ convolutional layer employed in most depth completion networks with a least squares fitting module which computes weights by fitting the implicit depth bases to the given sparse depth measurements. In addition, we show how our proposed method can be naturally extended to a multi-scale formulation for improved self-supervised training. We demonstrate through extensive experiments on various datasets that our approach achieves consistent improvements over state-of-the-art baseline methods with small computational overhead.
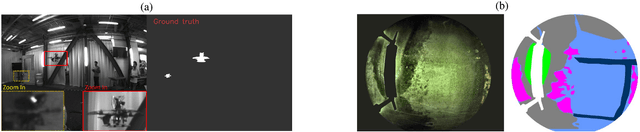
PST900: RGB-Thermal Calibration, Dataset and Segmentation Network
Sep 20, 2019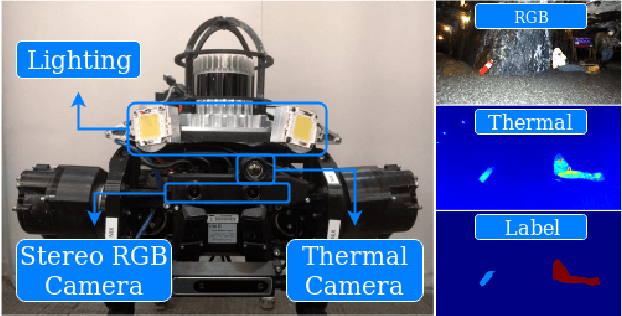
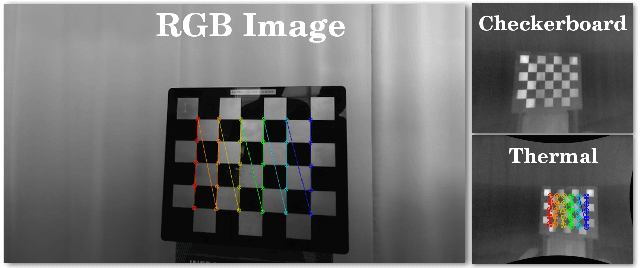
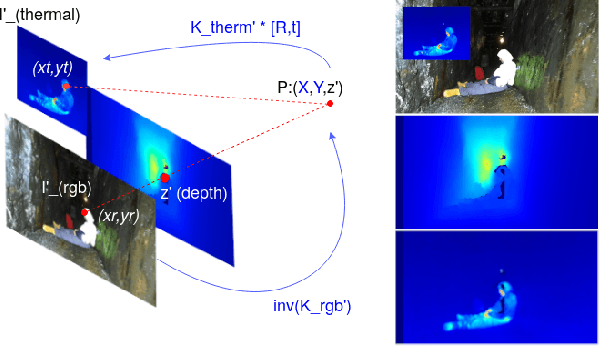
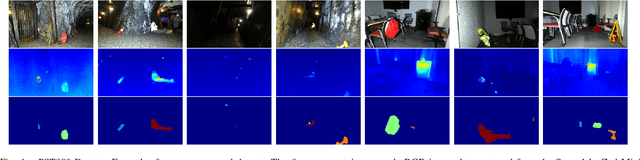
In this work we propose long wave infrared (LWIR) imagery as a viable supporting modality for semantic segmentation using learning-based techniques. We first address the problem of RGB-thermal camera calibration by proposing a passive calibration target and procedure that is both portable and easy to use. Second, we present PST900, a dataset of 894 synchronized and calibrated RGB and Thermal image pairs with per pixel human annotations across four distinct classes from the DARPA Subterranean Challenge. Lastly, we propose a CNN architecture for fast semantic segmentation that combines both RGB and Thermal imagery in a way that leverages RGB imagery independently. We compare our method against the state-of-the-art and show that our method outperforms them in our dataset.
Vision-based Multi-MAV Localization with Anonymous Relative Measurements Using Coupled Probabilistic Data Association Filter
Sep 18, 2019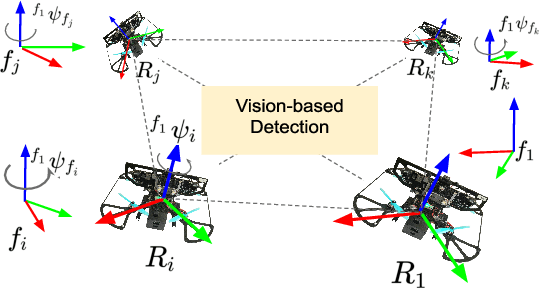
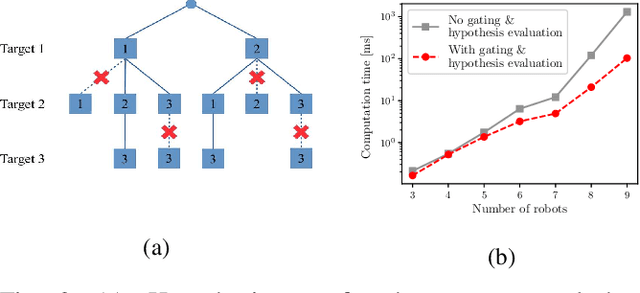
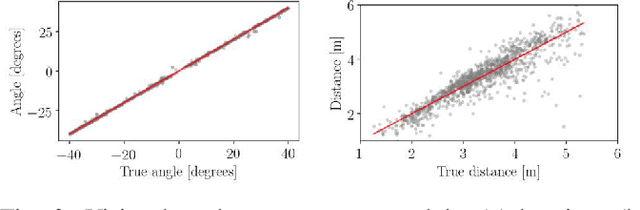
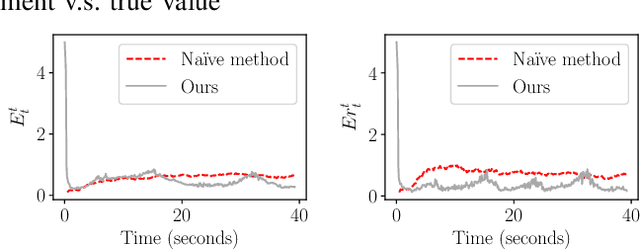
We address the localization of robots in a multi-MAV system where external infrastructure like GPS or motion capture system may not be available. We introduce a vision plus IMU system for localization that uses relative distance and bearing measurements. Our approach lends itself to implementation on platforms with several constraints on size, weight, and payload (SWaP). Particularly, our framework fuses the odometry with anonymous, visual-based robot-to-robot detection to estimate all robot poses in one common frame, addressing three main challenges: 1) initial configuration of the robot team is unknown, 2) data association between detection and robot targets is unknown, and 3) vision-based detection yields false negatives, false positives, inaccurate, noisy bearing and distance measurements of other robots. Our approach extends the Coupled Probabilistic Data Association Filter (CPDAF) to cope with nonlinear measurements. We demonstrate the superior performance of our approach over a simple VIO-based method in a simulation using measurement models obtained from real data. We also show how on-board sensing, estimation and control can be used for formation flight.
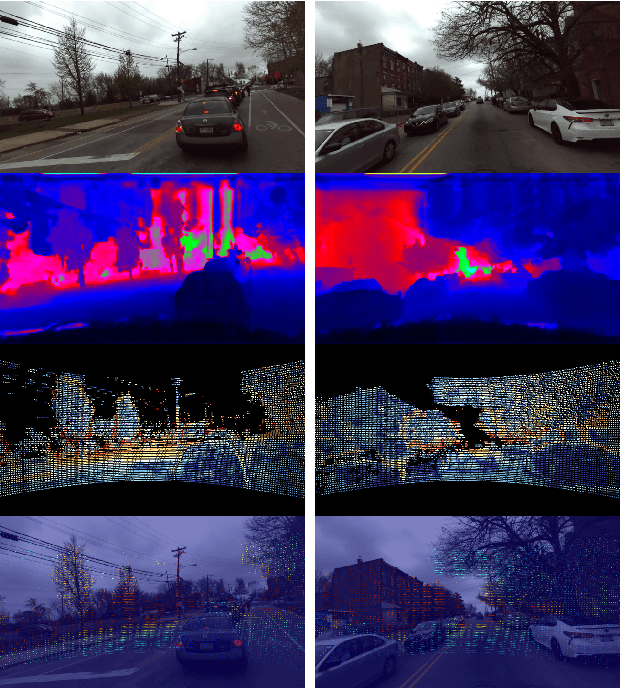
DFineNet: Ego-Motion Estimation and Depth Refinement from Sparse, Noisy Depth Input with RGB Guidance
Apr 10, 2019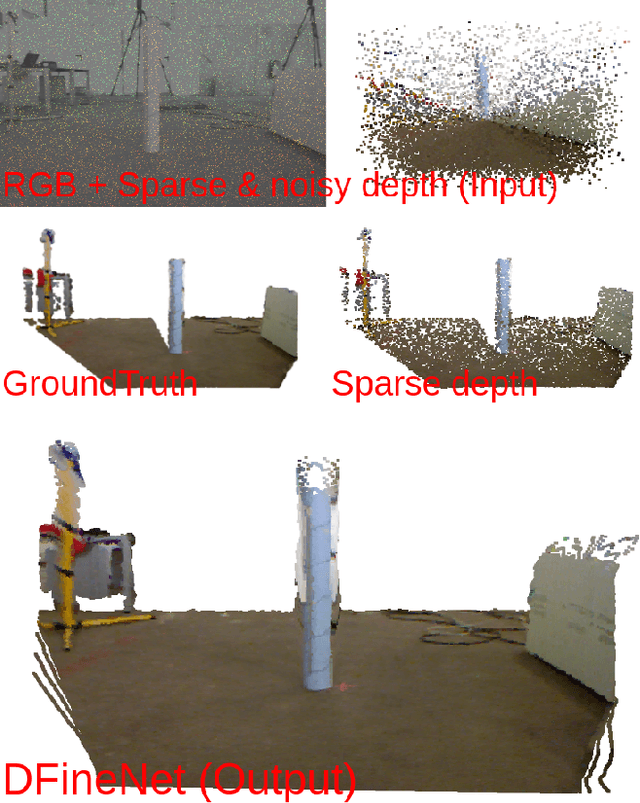
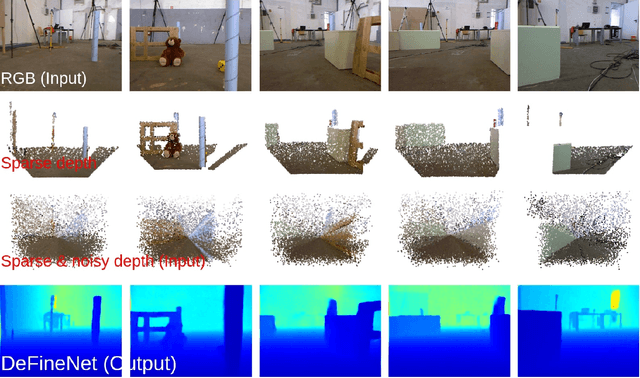
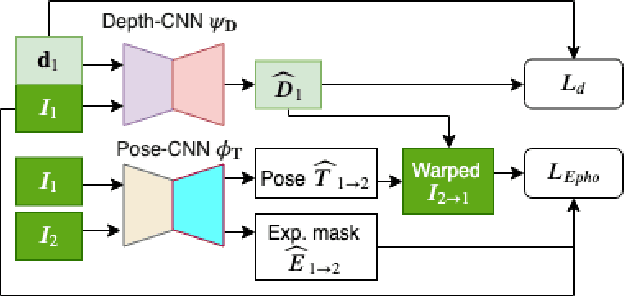
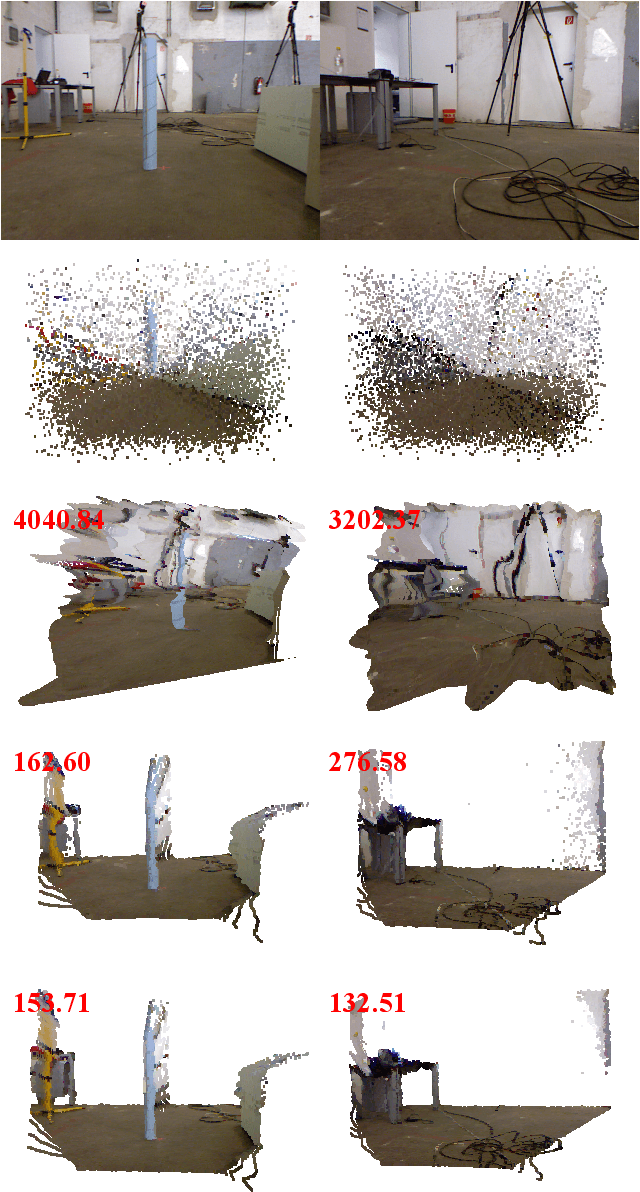
Depth estimation is an important capability for autonomous vehicles to understand and reconstruct 3D environments as well as avoid obstacles during the execution. Accurate depth sensors such as LiDARs are often heavy, expensive and can only provide sparse depth while lighter depth sensors such as stereo cameras are noiser in comparison. We propose an end-to-end learning algorithm that is capable of using sparse, noisy input depth for refinement and depth completion. Our model also produces the camera pose as a byproduct, making it a great solution for autonomous systems. We evaluate our approach on both indoor and outdoor datasets. Empirical results show that our method performs well on the KITTI~\cite{kitti_geiger2012we} dataset when compared to other competing methods, while having superior performance in dealing with sparse, noisy input depth on the TUM~\cite{sturm12iros} dataset.
MAVNet: an Effective Semantic Segmentation Micro-Network for MAV-based Tasks
Apr 03, 2019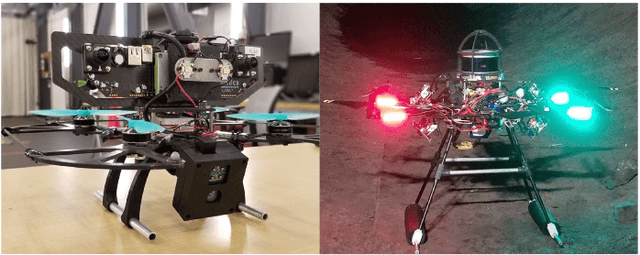
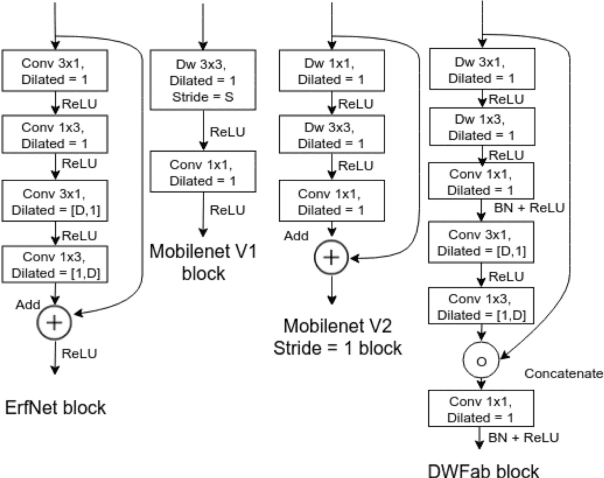

Real-time image semantic segmentation is an essential capability to enhance robot autonomy and improve human situational awareness. In this paper, we present MAVNet, a novel deep neural network approach for semantic segmentation suitable for small scale Micro Aerial Vehicles (MAVs). Our approach is compatible with the size, weight, and power(SWaP) constraints typical of small scale MAVs, which can only employ small processing units and GPUs. These units have typically limited computational capacity, which has to be concurrently shared with other real time performance tasks such as visual odometry and path planning. Our proposed solution MAVNet, is a fast and compact network inspired by ERFNet and features about 400 times fewer parameters in comparison. Experimental results on multiple datasets validate our proposed approach. Additionally, comparisons with other state of the art approaches show that our solution outperforms theirs in terms of speed and accuracy achieving up to 48 FPS on an NVIDIA 1080Ti and 9 FPS on the NVIDIA Jetson Xavier when processing high resolution imagery. Our algorithm and datasets are made publicly available.
Monocular Camera Based Fruit Counting and Mapping with Semantic Data Association
Mar 18, 2019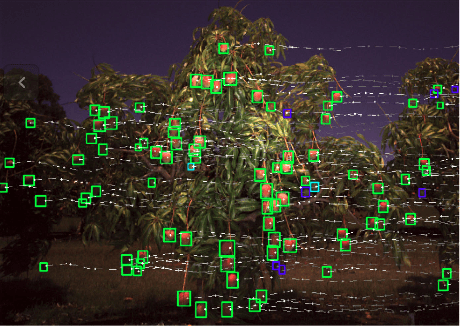


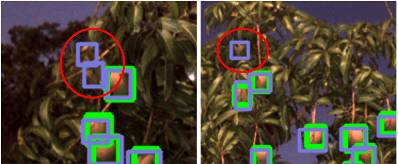
We present a cheap, lightweight, and fast fruit counting pipeline that uses a single monocular camera. Our pipeline that relies only on a monocular camera, achieves counting performance comparable to state-of-the-art fruit counting system that utilizes an expensive sensor suite including LiDAR and GPS/INS on a mango dataset. Our monocular camera pipeline begins with a fruit detection component that uses a deep neural network. It then uses semantic structure from motion (SFM) to convert these detections into fruit counts by estimating landmark locations of the fruit in 3D, and using these landmarks to identify double counting scenarios. There are many benefits of developing a low cost and lightweight fruit counting system, including applicability to agriculture in developing countries, where monetary constraints or unstructured environments necessitate cheaper hardware solutions.
DFuseNet: Deep Fusion of RGB and Sparse Depth Information for Image Guided Dense Depth Completion
Feb 02, 2019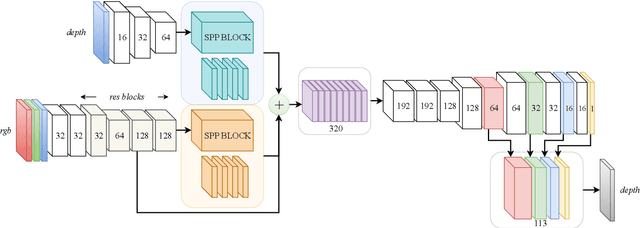
In this paper we propose a convolutional neural network that is designed to upsample a series of sparse range measurements based on the contextual cues gleaned from a high resolution intensity image. Our approach draws inspiration from related work on super-resolution and in-painting. We propose a novel architecture that seeks to pull contextual cues separately from the intensity image and the depth features and then fuse them later in the network. We argue that this approach effectively exploits the relationship between the two modalities and produces accurate results while respecting salient image structures. We present experimental results to demonstrate that our approach is comparable with state of the art methods and generalizes well across multiple datasets.
Simultaneous Localization and Layout Model Selection in Manhattan Worlds
Dec 13, 2018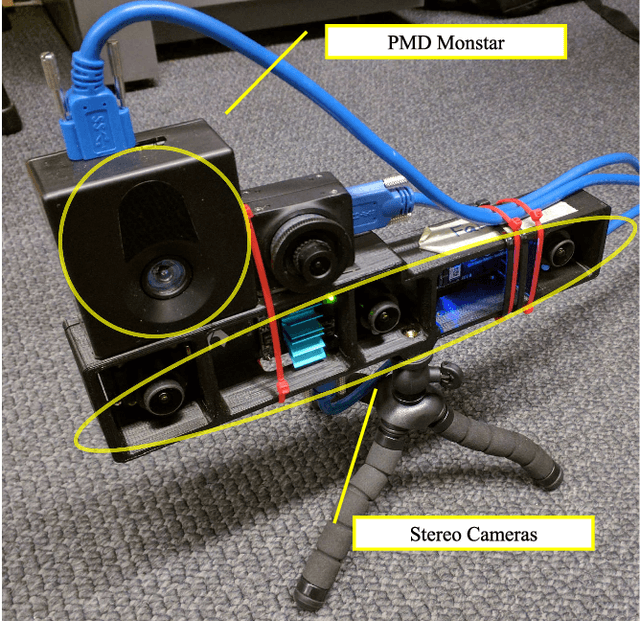

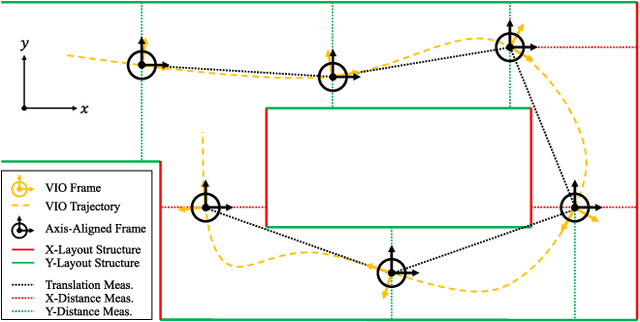
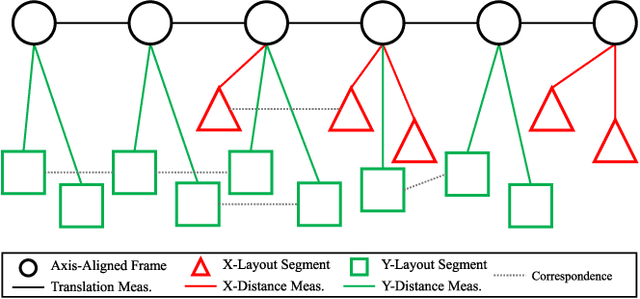
In this paper, we will demonstrate how Manhattan structure can be exploited to transform the Simultaneous Localization and Mapping (SLAM) problem, which is typically solved by a nonlinear optimization over feature positions, into a model selection problem solved by a convex optimization over higher order layout structures, namely walls, floors, and ceilings. Furthermore, we show how our novel formulation leads to an optimization procedure that automatically performs data association and loop closure and which ultimately produces the simplest model of the environment that is consistent with the available measurements. We verify our method on real world data sets collected with various sensing modalities.
Predictive and Semantic Layout Estimation for Robotic Applications in Manhattan Worlds
Nov 19, 2018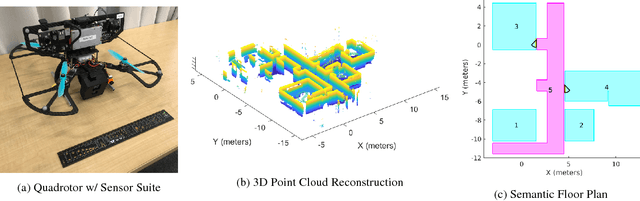
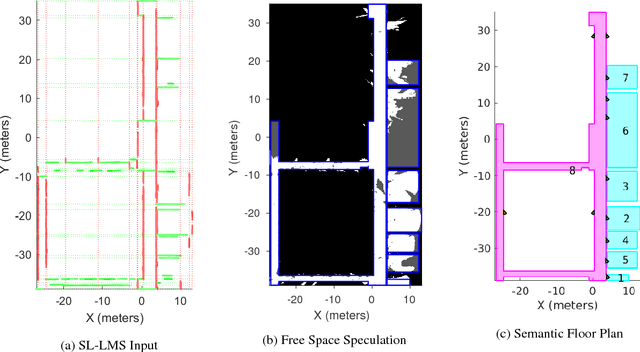

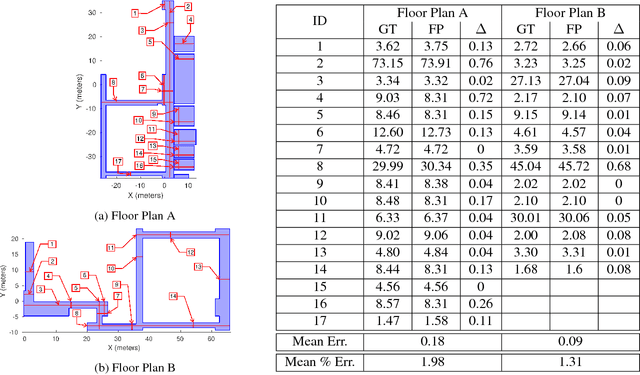
This paper describes an approach to automatically extracting floor plans from the kinds of incomplete measurements that could be acquired by an autonomous mobile robot. The approach proceeds by reasoning about extended structural layout surfaces which are automatically extracted from the available data. The scheme can be run in an online manner to build water tight representations of the environment. The system effectively speculates about room boundaries and free space regions which provides useful guidance to subsequent motion planning systems. Experimental results are presented on multiple data sets.
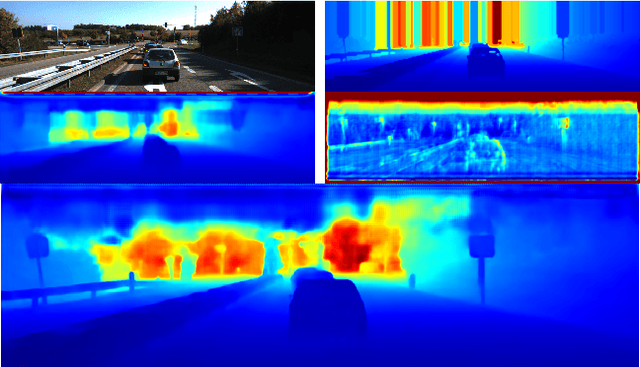
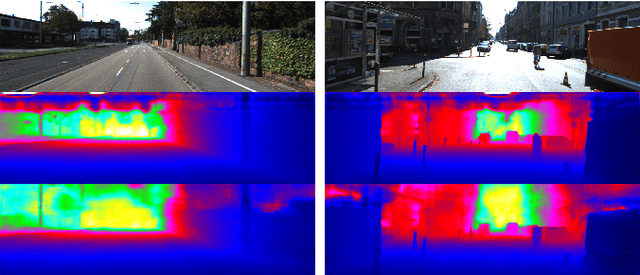
Real Time Dense Depth Estimation by Fusing Stereo with Sparse Depth Measurements
Sep 20, 2018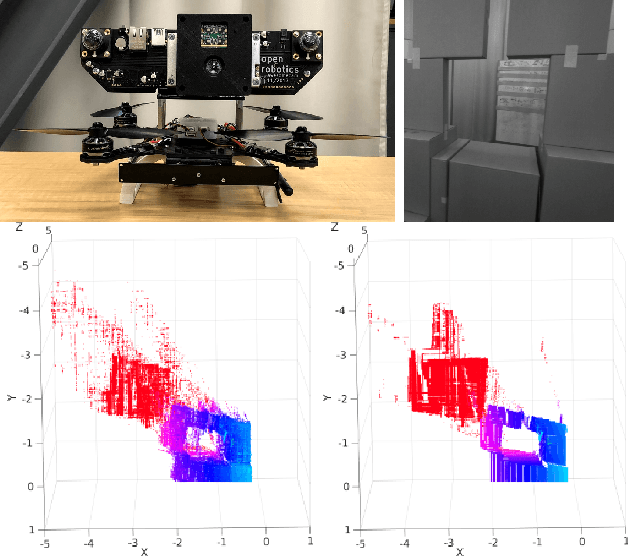
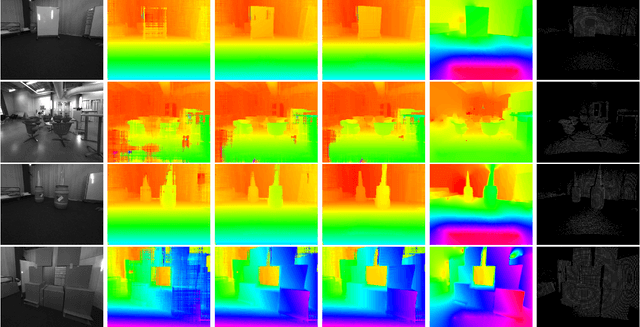
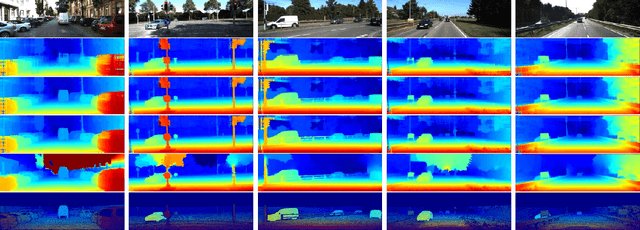
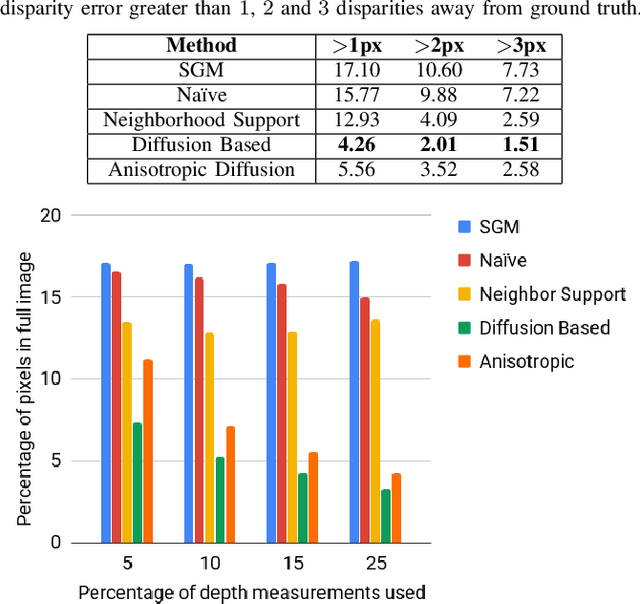
We present an approach to depth estimation that fuses information from a stereo pair with sparse range measurements derived from a LIDAR sensor or a range camera. The goal of this work is to exploit the complementary strengths of the two sensor modalities, the accurate but sparse range measurements and the ambiguous but dense stereo information. These two sources are effectively and efficiently fused by combining ideas from anisotropic diffusion and semi-global matching. We evaluate our approach on the KITTI 2015 and Middlebury 2014 datasets, using randomly sampled ground truth range measurements as our sparse depth input. We achieve significant performance improvements with a small fraction of range measurements on both datasets. We also provide qualitative results from our platform using the PMDTec Monstar sensor. Our entire pipeline runs on an NVIDIA TX-2 platform at 5Hz on 1280x1024 stereo images with 128 disparity levels.