 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpectral Kernel Dynamics via Maximum Caliber: Fixed Points, Geodesics, and Phase Transitions
Apr 10, 2026We derive a closed-form geometric functional for kernel dynamics on finite graphs by applying the Maximum Caliber (MaxCal) variational principle to the spectral transfer function h(lambda) of the graph Laplacian eigenbasis. The main result is that the MaxCal stationarity condition decouples into N one-dimensional problems with explicit solution: h*(lambda_l) = h_0(lambda_l) exp(-1 - T_l[h*]), yielding self-consistent (fixed-point) kernels via exponential tilting (Corollary 1), log-linear Fisher-Rao geodesics (Corollary 2), a diagonal Hessian stability criterion (Corollary 3), and an l^2_+ isometry for the spectral kernel space (Proposition 3). The spectral entropy H[h_t] provides a computable O(N) early-warning signal for network-structural phase transitions (Remark 7). All claims are numerically verified on the path graph P_8 with a Gaussian mutual-information source, using the open-source kernelcal library. The framework is grounded in a structural analogy with Einstein's field equations, used as a guiding template rather than an established equivalence; explicit limits are stated in Section 6.
Kernel Dynamics under Path Entropy Maximization
Mar 29, 2026We propose a variational framework in which the kernel function k : X x X -> R, interpreted as the foundational object encoding what distinctions an agent can represent, is treated as a dynamical variable subject to path entropy maximization (Maximum Caliber, MaxCal). Each kernel defines a representational structure over which an information geometry on probability space may be analyzed; a trajectory through kernel space therefore corresponds to a trajectory through a family of effective geometries, making the optimization landscape endogenous to its own traversal. We formulate fixed-point conditions for self-consistent kernels, propose renormalization group (RG) flow as a structured special case, and suggest neural tangent kernel (NTK) evolution during deep network training as a candidate empirical instantiation. Under explicit information-thermodynamic assumptions, the work required for kernel change is bounded below by delta W >= k_B T delta I_k, where delta I_k is the mutual information newly unlocked by the updated kernel. In this view, stable fixed points of MaxCal over kernels correspond to self-reinforcing distinction structures, with biological niches, scientific paradigms, and craft mastery offered as conjectural interpretations. We situate the framework relative to assembly theory and the MaxCal literature, separate formal results from structured correspondences and conjectural bridges, and pose six open questions that make the program empirically and mathematically testable.
Engineering Mythology: A Digital-Physical Framework for Culturally-Inspired Public Art
Mar 29, 2026Navagunjara Reborn: The Phoenix of Odisha was built for Burning Man 2025 as both a sculpture and an experiment-a fusion of myth, craft, and computation. This paper describes the digital-physical workflow developed for the project: a pipeline that linked digital sculpting, distributed fabrication by artisans in Odisha (India), modular structural optimization in the U.S., iterative feedback through photogrammetry and digital twins, and finally, one-shot full assembly at the art site in Black Rock Desert, Nevada. The desert installation tested not just materials, but also systems of collaboration: between artisans and engineers, between myth and technology, between cultural specificity and global experimentation. We share the lessons learned in design, fabrication, and deployment and offer a framework for future interdisciplinary projects at the intersection of cultural heritage, STEAM education, and public art. In retrospect, this workflow can be read as a convergence of many knowledge systems-artisan practice, structural engineering, mythic narrative, and environmental constraint-rather than as execution of a single fixed blueprint.
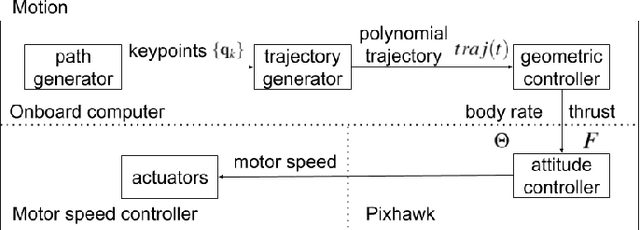
Towards Model Predictive Control for Acrobatic Quadrotor Flights
Jan 30, 2024This study explores modeling and control for quadrotor acrobatics, focusing on executing flip maneuvers. Flips are an elegant way to deliver sensor probes into no-fly or hazardous zones, like volcanic vents. Successful flips require feasible trajectories and precise control, influenced by rotor dynamics, thrust allocation, and control methodologies. The research introduces a novel approach using Model Predictive Control (MPC) for real-time trajectory planning. The MPC considers dynamic constraints and environmental variables, ensuring system stability during maneuvers. The proposed methodology's effectiveness is examined through simulation studies in ROS and Gazebo, providing insights into quadrotor behavior, response time, and trajectory accuracy. Real-time flight experiments on a custom agile quadrotor using PixHawk 4 and Hardkernel Odroid validate MPC-designed controllers. Experiments confirm successful execution and adaptability to real-world scenarios. Outcomes contribute to autonomous aerial robotics, especially aerial acrobatics, enhancing mission capabilities. MPC controllers find applications in probe throws and optimal image capture views through efficient flight paths, e.g., full roll maneuvers. This research paves the way for quadrotors in demanding scenarios, showcasing groundbreaking applications. Video Link: \url{ https://www.youtube.com/watch?v=UzR0PWjy9W4}
Decision-Theoretic Approaches for Robotic Environmental Monitoring -- A Survey
Aug 04, 2023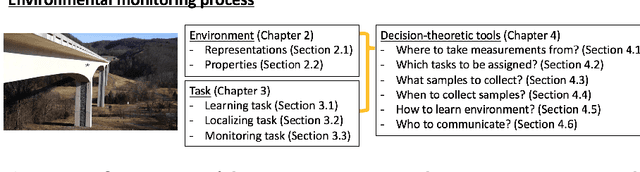
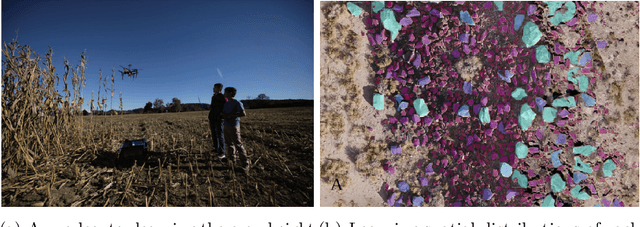
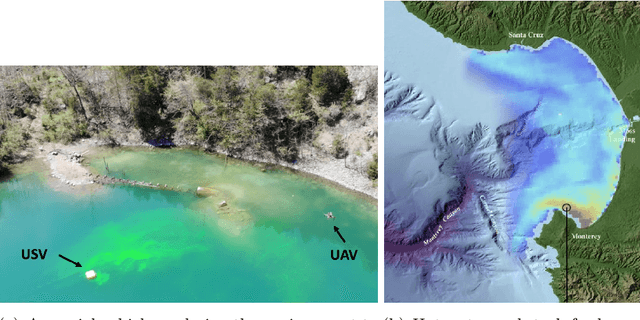
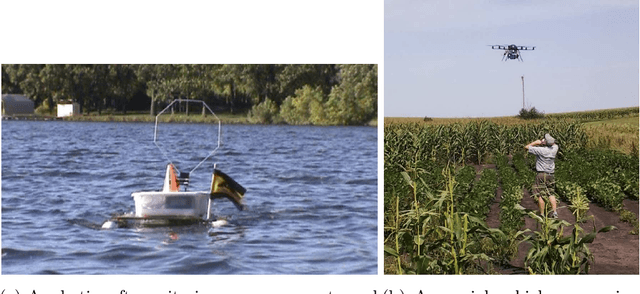
Robotics has dramatically increased our ability to gather data about our environments. This is an opportune time for the robotics and algorithms community to come together to contribute novel solutions to pressing environmental monitoring problems. In order to do so, it is useful to consider a taxonomy of problems and methods in this realm. We present the first comprehensive summary of decision theoretic approaches that are enabling efficient sampling of various kinds of environmental processes. Representations for different kinds of environments are explored, followed by a discussion of tasks of interest such as learning, localization, or monitoring. Finally, various algorithms to carry out these tasks are presented, along with a few illustrative prior results from the community.
Shakebot: A Low-cost, Open-source Shake Table for Ground Motion Seismic Studies
Dec 21, 2022Our earlier research built a virtual shake robot in simulation to study the dynamics of precariously balanced rocks (PBR), which are negative indicators of earthquakes in nature. The simulation studies need validation through physical experiments. For this purpose, we developed Shakebot, a low-cost (under $2,000), open-source shake table to validate simulations of PBR dynamics and facilitate other ground motion experiments. The Shakebot is a custom one-dimensional prismatic robotic system with perception and motion software developed using the Robot Operating System (ROS). We adapted affordable and high-accuracy components from 3D printers, particularly a closed-loop stepper motor for actuation and a toothed belt for transmission. The stepper motor enables the bed to reach a maximum horizontal acceleration of 11.8 m/s^2 (1.2 g), and velocity of 0.5 m/s, when loaded with a 2 kg scale-model PBR. The perception system of the Shakebot consists of an accelerometer and a high frame-rate camera. By fusing camera-based displacements with acceleration measurements, the Shakebot is able to carry out accurate bed velocity estimation. The ROS-based perception and motion software simplifies the transition of code from our previous virtual shake robot to the physical Shakebot. The reuse of the control programs ensures that the implemented ground motions are consistent for both the simulation and physical experiments, which is critical to validate our simulation experiments.
Autonomous Robotic Mapping of Fragile Geologic Features
May 04, 2021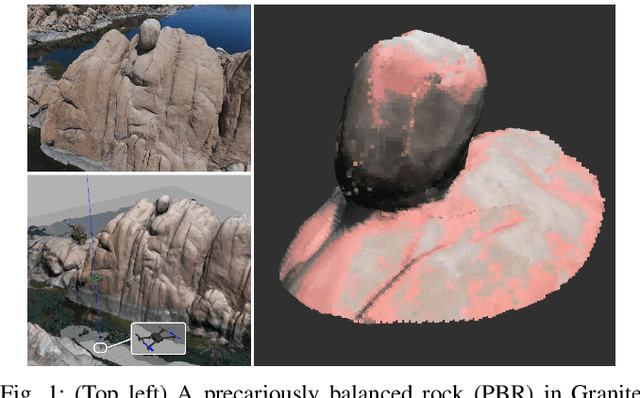
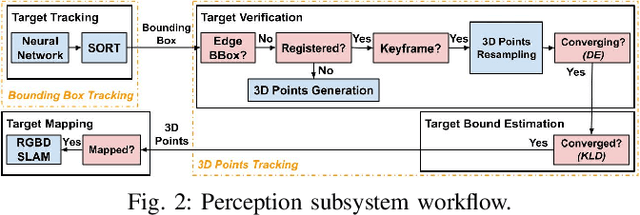
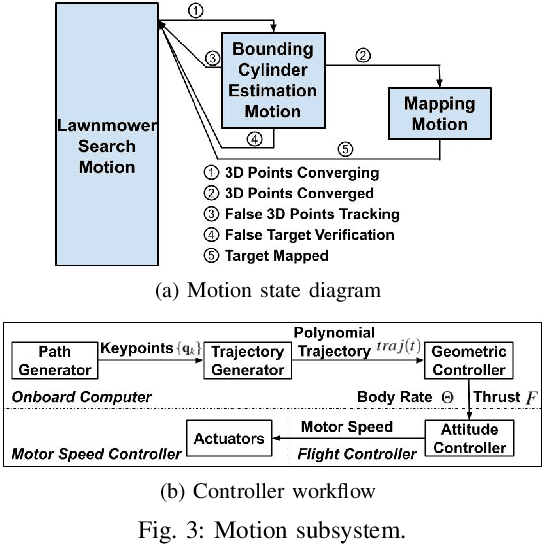
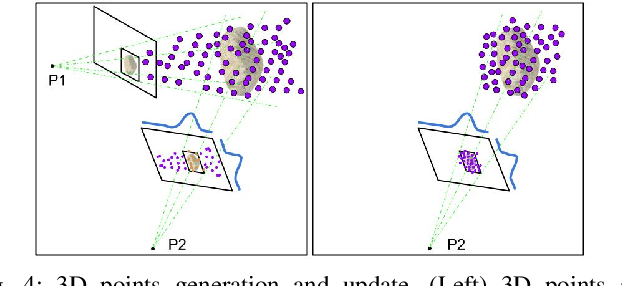
Robotic mapping is useful in scientific applications that involve surveying unstructured environments. This paper presents a target-oriented mapping system for sparsely distributed geologic surface features, such as precariously balanced rocks (PBRs), whose geometric fragility parameters can provide valuable information on earthquake shaking history and landscape development for a region. With this geomorphology problem as the test domain, we demonstrate a pipeline for detecting, localizing, and precisely mapping fragile geologic features distributed on a landscape. To do so, we first carry out a lawn-mower search pattern in the survey region from a high elevation using an Unpiloted Aerial Vehicle (UAV). Once a potential PBR target is detected by a deep neural network, we track the bounding box in the image frames using a real-time tracking algorithm. The location and occupancy of the target in world coordinates are estimated using a sampling-based filtering algorithm, where a set of 3D points are re-sampled after weighting by the tracked bounding boxes from different camera perspectives. The converged 3D points provide a prior on 3D bounding shape of a target, which is used for UAV path planning to closely and completely map the target with Simultaneous Localization and Mapping (SLAM). After target mapping, the UAV resumes the lawn-mower search pattern to find the next target. We introduce techniques to make the target mapping robust to false positive and missing detection from the neural network. Our target-oriented mapping system has the advantages of reducing map storage and emphasizing complete visible surface features on specified targets.
Robotics During a Pandemic: The 2020 NSF CPS Virtual Challenge -- SoilScope, Mars Edition
Mar 15, 2021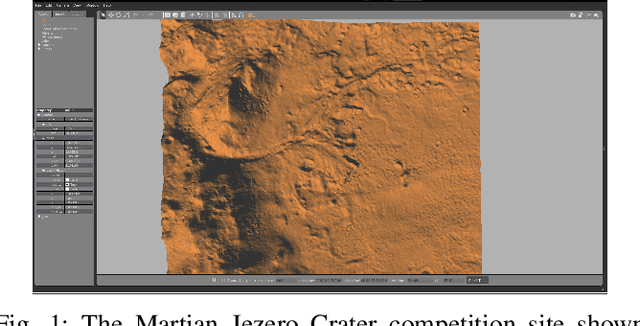
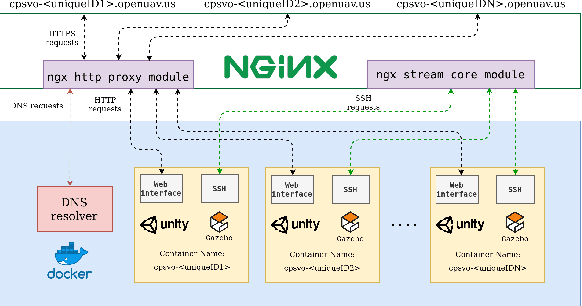

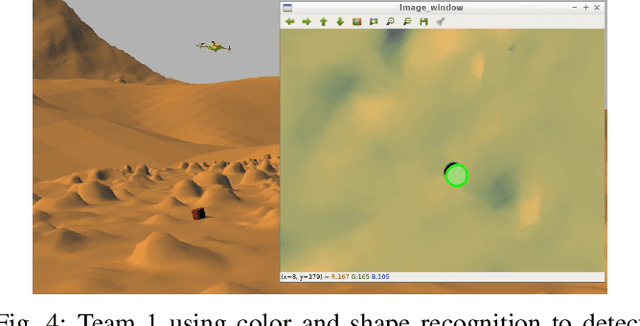
Remote sample recovery is a rapidly evolving application of Small Unmanned Aircraft Systems (sUAS) for planetary sciences and space exploration. Development of cyber-physical systems (CPS) for autonomous deployment and recovery of sensor probes for sample caching is already in progress with NASA's MARS 2020 mission. To challenge student teams to develop autonomy for sample recovery settings, the 2020 NSF CPS Challenge was positioned around the launch of the MARS 2020 rover and sUAS duo. This paper discusses perception and trajectory planning for sample recovery by sUAS in a simulation environment. Out of a total of five teams that participated, the results of the top two teams have been discussed. The OpenUAV cloud simulation framework deployed on the Cyber-Physical Systems Virtual Organization (CPS-VO) allowed the teams to work remotely over a month during the COVID-19 pandemic to develop and simulate autonomous exploration algorithms. Remote simulation enabled teams across the globe to collaborate in experiments. The two teams approached the task of probe search, probe recovery, and landing on a moving target differently. This paper is a summary of teams' insights and lessons learned, as they chose from a wide range of perception sensors and algorithms.
Localization and Mapping of Sparse Geologic Features with Unpiloted Aircraft Systems
Jul 02, 2020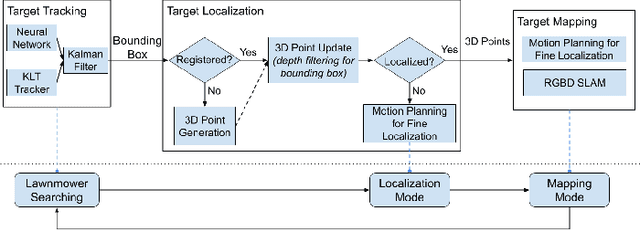
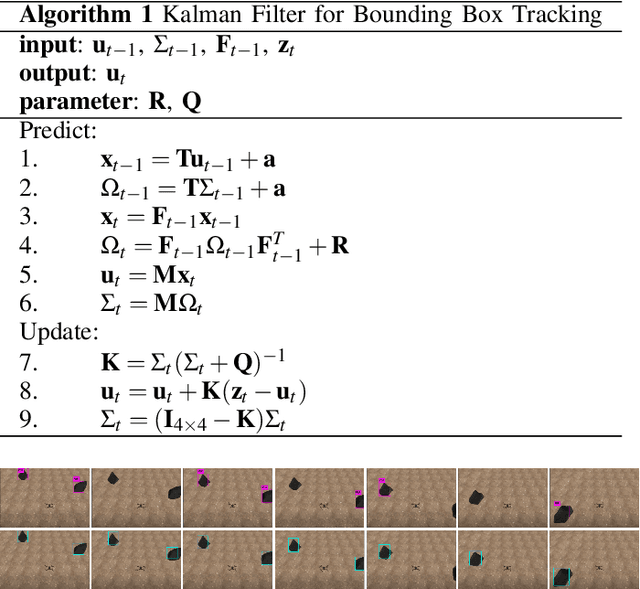
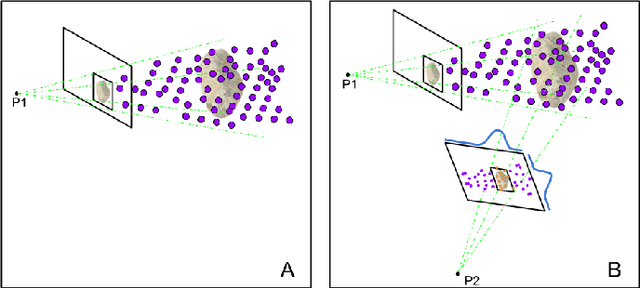
Robotic mapping is attractive in many science applications that involve environmental surveys. This paper presents a system for localization and mapping of sparsely distributed surface features such as precariously balanced rocks (PBRs), whose geometric fragility (stability) parameters provide valuable information on earthquake processes. With geomorphology as the test domain, we carry out a lawnmower search pattern using an Unpiloted Aerial Vehicle (UAV) equipped with a GPS module, stereo camera, and onboard computers. Once a target is detected by a deep neural network, we track its bounding box in the image coordinates by applying a Kalman filter that fuses the deep learning detection with KLT tracking. The target is localized in world coordinates using depth filtering where a set of 3D points are filtered by object bounding boxes from different camera perspectives. The 3D points also provide a strong prior on target shape, which is used for UAV path planning to accurately map the target using RGBD SLAM. After target mapping, the UAS resumes the lawnmower search pattern to locate the next target. Our end goal is a real-time mapping methodology for sparsely distributed surface features on earth or on extraterrestrial surfaces.
The OpenUAV Swarm Simulation Testbed: a Collaborative DesignStudio for Field Robotics
Oct 02, 2019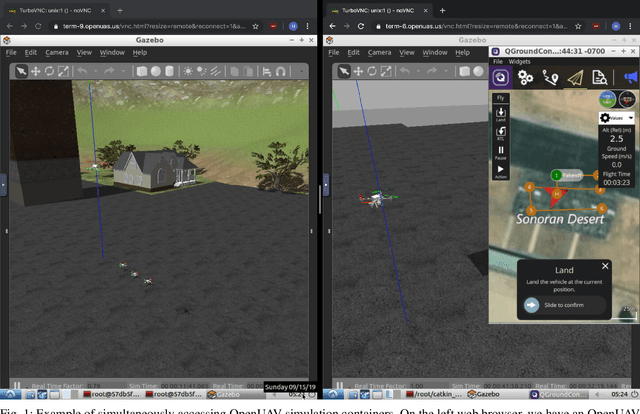
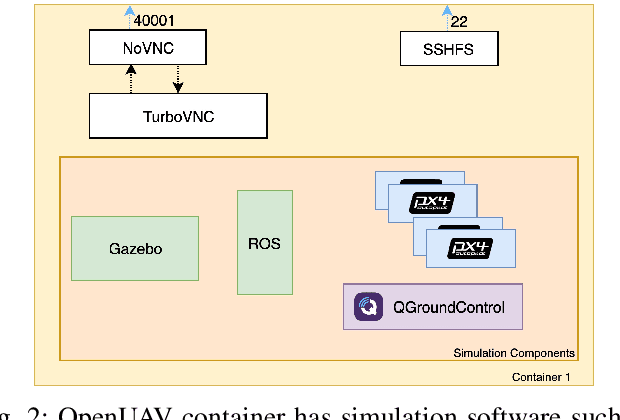
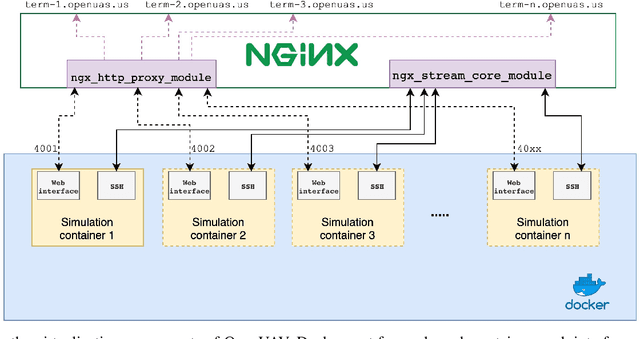
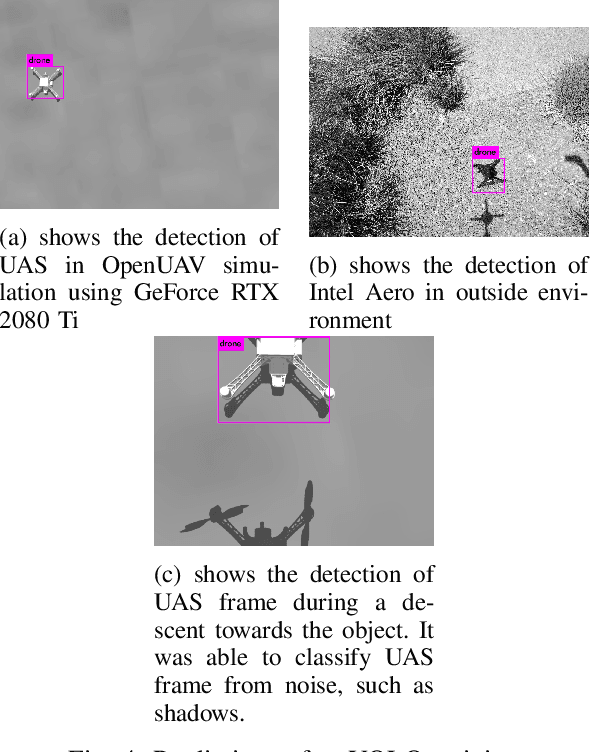
In this paper, we showcase a multi-robot design studio where simulation containers are browser accessible Lubuntu desktops. Our simulation testbed, based on ROS, Gazebo, PX4 flight stack has been developed to tackle higher-level challenging tasks such as mission planning, vision-based problems, collision avoidance, and multi-robot coordination for Unpiloted Aircraft Systems (UAS). The novel architecture is built around TurboVNC and noVNC WebSockets technology, to seamlessly provide real-time web performance for 3D rendering in a collaborative design tool. We have built upon our previous work that leveraged concurrent multi-UAS simulations, and extended it to be useful for underwater, airship and ground vehicles. This opens up the possibility for both rigorous Monte Carlo styled software testing of heterogeneous swarm simulations, as well as sampling-based optimization of mission parameters. The new OpenUAV architecture has native support for ROS, PX4 and QGroundControl. Two case studies in the paper illustrate the development of UAS missions in the latest OpenUAV setup. The first example highlights the development of a visual-servoing technique for UAS descent on a target. Second case study referred to as terrain relative navigation (TRN) involves creating a reactive planner for UAS navigation by keeping a constant distance from the terrain.