 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Utility-preserving De-identification Pipeline for Cross-hospital Radiology Data Sharing
Apr 08, 2026Large-scale radiology data are critical for developing robust medical AI systems. However, sharing such data across hospitals remains heavily constrained by privacy concerns. Existing de-identification research in radiology mainly focus on removing identifiable information to enable compliant data release. Yet whether de-identified radiology data can still preserve sufficient utility for large-scale vision-language model training and cross-hospital transfer remains underexplored. In this paper, we introduce a utility-preserving de-identification pipeline (UPDP) for cross-hospital radiology data sharing. Specifically, we compile a blacklist of privacy-sensitive terms and a whitelist of pathology-related terms. For radiology images, we use a generative filtering mechanism that synthesis a privacy-filtered and pathology-reserved counterparts of the original images. These synthetic image counterparts, together with ID-filtered reports, can then be securely shared across hospitals for downstream model development and evaluation. Experiments on public chest X-ray benchmarks demonstrate that our method effectively removes privacy-sensitive information while preserving diagnostically relevant pathology cues. Models trained on the de-identified data maintain competitive diagnostic accuracy compared with those trained on the original data, while exhibiting a marked decline in identity-related accuracy, confirming effective privacy protection. In the cross-hospital setting, we further show that de-identified data can be combined with local data to yield better performance.
StackingNet: Collective Inference Across Independent AI Foundation Models
Feb 14, 2026Artificial intelligence built on large foundation models has transformed language understanding, vision and reasoning, yet these systems remain isolated and cannot readily share their capabilities. Integrating the complementary strengths of such independent foundation models is essential for building trustworthy intelligent systems. Despite rapid progress in individual model design, there is no established approach for coordinating such black-box heterogeneous models. Here we show that coordination can be achieved through a meta-ensemble framework termed StackingNet, which draws on principles of collective intelligence to combine model predictions during inference. StackingNet improves accuracy, reduces bias, enables reliability ranking, and identifies or prunes models that degrade performance, all operating without access to internal parameters or training data. Across tasks involving language comprehension, visual estimation, and academic paper rating, StackingNet consistently improves accuracy, robustness, and fairness, compared with individual models and classic ensembles. By turning diversity from a source of inconsistency into collaboration, StackingNet establishes a practical foundation for coordinated artificial intelligence, suggesting that progress may emerge from not only larger single models but also principled cooperation among many specialized ones.
Humanoid Whole-Body Badminton via Multi-Stage Reinforcement Learning
Nov 14, 2025Humanoid robots have demonstrated strong capability for interacting with deterministic scenes across locomotion, manipulation, and more challenging loco-manipulation tasks. Yet the real world is dynamic, quasi-static interactions are insufficient to cope with the various environmental conditions. As a step toward more dynamic interaction scenario, we present a reinforcement-learning-based training pipeline that produces a unified whole-body controller for humanoid badminton, enabling coordinated lower-body footwork and upper-body striking without any motion priors or expert demonstrations. Training follows a three-stage curriculum: first footwork acquisition, then precision-guided racket swing generation, and finally task-focused refinement, yielding motions in which both legs and arms serve the hitting objective. For deployment, we incorporate an Extended Kalman Filter (EKF) to estimate and predict shuttlecock trajectories for target striking. We also introduce a prediction-free variant that dispenses with EKF and explicit trajectory prediction. To validate the framework, we conduct five sets of experiment in both simulation and the real world. In simulation, two robots sustain a rally of 21 consecutive hits. Moreover, the prediction-free variant achieves successful hits with comparable performance relative to the target-known policy. In real-world tests, both the prediction and controller module exhibit high accuracy, and on-court hitting achieves an outgoing shuttle speed up to 10 m/s with a mean return landing distance of 3.5 m. These experiment results show that our humanoid robot can deliver highly dynamic while precise goal striking in badminton, and can be adapted to more dynamism critical domains.
Monocular Camera Based Fruit Counting and Mapping with Semantic Data Association
Mar 18, 2019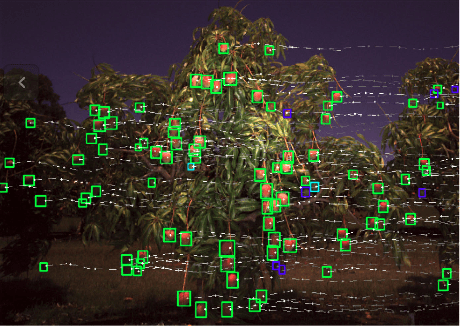


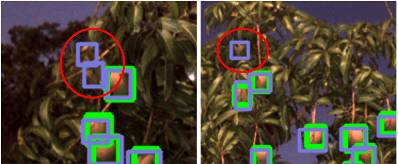
We present a cheap, lightweight, and fast fruit counting pipeline that uses a single monocular camera. Our pipeline that relies only on a monocular camera, achieves counting performance comparable to state-of-the-art fruit counting system that utilizes an expensive sensor suite including LiDAR and GPS/INS on a mango dataset. Our monocular camera pipeline begins with a fruit detection component that uses a deep neural network. It then uses semantic structure from motion (SFM) to convert these detections into fruit counts by estimating landmark locations of the fruit in 3D, and using these landmarks to identify double counting scenarios. There are many benefits of developing a low cost and lightweight fruit counting system, including applicability to agriculture in developing countries, where monetary constraints or unstructured environments necessitate cheaper hardware solutions.