 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Spatiotemporal Intent Sequence Recommendation via Implicit Reasoning in Amap
May 27, 2026Real-world user behavior rarely consists of isolated actions; instead, it often forms intent flows governed by spatiotemporal dependencies. To provide integrated service recommendations, we focus on the task of Generative Spatiotemporal Intent Sequence Recommendation (GSISR), which aims to generate intent sequences that are logically coherent and physically executable within complex spatiotemporal contexts. While LLMs offer strong reasoning potential for GSISR, direct industrial deployment is limited by high inference latency and context-mismatched or physically infeasible plans. To address these challenges, we propose a generative framework, GPlan, that internalizes LLM reasoning into lightweight models through two components. First, to enable reasoning under strict latency constraints, we introduce Progressive Implicit CoT Distillation, which compresses explicit reasoning processes into reserved latent tokens, allowing small models to inherit complex planning logic without generating long reasoning text. Second, to address the disconnect between general knowledge and real-world constraints, we design Spatiotemporal Counterfactual DPO. By aligning the model with counterfactual context-plan pairs, we improve sensitivity to spatiotemporal context and reduce context-mismatched plans. Offline experiments and online A/B testing demonstrate that our approach improves sequence coherence and context responsiveness. Our implementation and the anonymized GSISR dataset are available at https://github.com/alibaba/GPlan.
Autoregressive Visual Generation Needs a Prologue
May 07, 2026In this work, we propose Prologue, an approach to bridging the reconstruction-generation gap in autoregressive (AR) image generation. Instead of modifying visual tokens to satisfy both reconstruction and generation, Prologue generates a small set of prologue tokens prepended to the visual token sequence. These prologue tokens are trained exclusively with the AR cross-entropy (CE) loss, while visual tokens remain dedicated to reconstruction. This decoupled design lets us optimize generation through the AR model's true distribution without affecting reconstruction quality, which we further formalize from an ELBO perspective. On ImageNet 256x256, Prologue-Base reduces gFID from 21.01 to 10.75 without classifier-free guidance while keeping reconstruction almost unchanged; Prologue-Large reaches a competitive rFID of 0.99 and gFID of 1.46 using a standard AR model without auxiliary semantic supervision. Interestingly, driven only by AR gradients, prologue tokens exhibit emergent semantic structure: linear probing on 16 prologue tokens reaches 35.88% Top-1, far above the 23.71% of the first 16 tokens from a standard tokenizer; resampling with fixed prologue tokens preserves a similar high-level semantic layout. Our results suggest a new direction: generation quality can be improved by introducing a separate learned generative representation while leaving the original representation intact.
Taming the Entropy Cliff: Variable Codebook Size Quantization for Autoregressive Visual Generation
May 07, 2026Most discrete visual tokenizers rely on a default design: every position in the sequence shares the same codebook. Researchers try to scale the codebook size $K$ to get better reconstruction performance. Such a constant-codebook design hits a fundamental information-theoretic limit. We observe that the per-position conditional entropy of the training set decays so quickly along the sequence that, after a few positions, the conditional distribution becomes essentially deterministic. On ImageNet with $K=16384$, this happens within only 2 out of 256 positions, turning the remaining 254 into a memorization problem. We call this phenomenon the Entropy Cliff and formalize it with a simple expression: $t^{*} = \lceil \log_2 N / \log_2 K \rceil$. Interestingly, this phenomenon is not observed in language, as its natural structure keeps the effective entropy per position well below the codebook capacity. To address this, we propose Variable Codebook Size Quantization (VCQ), where the codebook size $K_t$ grows monotonically along the sequence from $K_{\min}=2$ to $K_{\max}$, leaving the loss function, parameter count, and AR training procedure unchanged. With a vanilla autoregressive Transformer and standard next-token prediction, a base version of VCQ reduces gFID w/o CFG from 27.98 to 14.80 on ImageNet $256\times256$ over the baseline. Scaled up, it reaches gFID 1.71 with 684M autoregressive parameters, without any extra training techniques such as semantic regularization or causal alignment. The extreme information bottleneck at $K_{\min}=2$ naturally induces a coarse-to-fine semantic hierarchy: a linear probe on only the first 10 tokens reaches 43.8% top-1 accuracy on ImageNet, compared to 27.1% for uniform codebooks. Ultimately, these results show that what matters is not only the total capacity of the codebook, but also how that capacity is distributed and organized.
Learning Discrete Autoregressive Priors with Wasserstein Gradient Flow
May 07, 2026Discrete image tokenizers are commonly trained in two stages: first for reconstruction, and then with a prior model fitted to the frozen token sequences. This decoupling leaves the tokenizer unaware of the model that will later generate its tokens. As a result, the learned tokens may preserve image information well but still be difficult for an autoregressive (AR) prior to predict from left to right. We analyze this mismatch using Tripartite Variational Consistency (TVC), which decomposes latent-variable learning into three consistency conditions: conditional-likelihood consistency, prior consistency, and posterior consistency. TVC shows that two-stage training preserves the reconstruction side but leaves prior consistency outside the tokenizer objective: the overall token distribution is fixed before the AR prior participates in training. Motivated by this view, we add a distribution-level prior-matching signal during tokenizer training, while keeping the reconstruction objective unchanged. We optimize this signal with a Wasserstein-gradient-flow update. For hard categorical tokens, the update reduces to a token-level contrast between an auxiliary AR model that tracks the tokenizer's current token distribution and the target AR prior. It requires only forward passes through the two AR models and does not backpropagate through either of them. The resulting tokenizer, wAR-Tok, reduces AR loss and improves generation FID on CIFAR-10 and ImageNet at comparable reconstruction quality.
A Self-Evolving Agentic Framework for Metasurface Inverse Design
Apr 01, 2026Metasurface inverse design has become central to realizing complex optical functionality, yet translating target responses into executable, solver-compatible workflows still demands specialized expertise in computational electromagnetics and solver-specific software engineering. Recent large language models (LLMs) offer a complementary route to reducing this workflow-construction burden, but existing language-driven systems remain largely session-bounded and do not preserve reusable workflow knowledge across inverse-design tasks. We present an agentic framework for metasurface inverse design that addresses this limitation through context-level skill evolution. The framework couples a coding agent, evolving skill artifacts, and a deterministic evaluator grounded in physical simulation so that solver-specific strategies can be iteratively refined across tasks without modifying model weights or the underlying physics solver. We evaluate the framework on a benchmark spanning multiple metasurface inverse-design task types, with separate training-aligned and held-out task families. Evolved skills raise in-distribution task success from 38% to 74%, increase criteria pass fraction from 0.510 to 0.870, and reduce average attempts from 4.10 to 2.30. On held-out task families, binary success changes only marginally, but improvements in best margin together with shifts in error composition and agent behavior indicate partial transfer of workflow knowledge. These results suggest that the main value of skill evolution lies in accumulating reusable solver-specific expertise around reliable computational engines, thereby offering a practical path toward more autonomous and accessible metasurface inverse-design workflows.
Deep Research for Recommender Systems
Mar 08, 2026The technical foundations of recommender systems have progressed from collaborative filtering to complex neural models and, more recently, large language models. Despite these technological advances, deployed systems often underserve their users by simply presenting a list of items, leaving the burden of exploration, comparison, and synthesis entirely on the user. This paper argues that this traditional "tool-based" paradigm fundamentally limits user experience, as the system acts as a passive filter rather than an active assistant. To address this limitation, we propose a novel deep research paradigm for recommendation, which replaces conventional item lists with comprehensive, user-centric reports. We instantiate this paradigm through RecPilot, a multi-agent framework comprising two core components: a user trajectory simulation agent that autonomously explores the item space, and a self-evolving report generation agent that synthesizes the findings into a coherent, interpretable report tailored to support user decisions. This approach reframes recommendation as a proactive, agent-driven service. Extensive experiments on public datasets demonstrate that RecPilot not only achieves strong performance in modeling user behaviors but also generates highly persuasive reports that substantially reduce user effort in item evaluation, validating the potential of this new interaction paradigm.
VII: Visual Instruction Injection for Jailbreaking Image-to-Video Generation Models
Feb 24, 2026Image-to-Video (I2V) generation models, which condition video generation on reference images, have shown emerging visual instruction-following capability, allowing certain visual cues in reference images to act as implicit control signals for video generation. However, this capability also introduces a previously overlooked risk: adversaries may exploit visual instructions to inject malicious intent through the image modality. In this work, we uncover this risk by proposing Visual Instruction Injection (VII), a training-free and transferable jailbreaking framework that intentionally disguises the malicious intent of unsafe text prompts as benign visual instructions in the safe reference image. Specifically, VII coordinates a Malicious Intent Reprogramming module to distill malicious intent from unsafe text prompts while minimizing their static harmfulness, and a Visual Instruction Grounding module to ground the distilled intent onto a safe input image by rendering visual instructions that preserve semantic consistency with the original unsafe text prompt, thereby inducing harmful content during I2V generation. Empirically, our extensive experiments on four state-of-the-art commercial I2V models (Kling-v2.5-turbo, Gemini Veo-3.1, Seedance-1.5-pro, and PixVerse-V5) demonstrate that VII achieves Attack Success Rates of up to 83.5% while reducing Refusal Rates to near zero, significantly outperforming existing baselines.
Improving LLM-based Recommendation with Self-Hard Negatives from Intermediate Layers
Feb 19, 2026Large language models (LLMs) have shown great promise in recommender systems, where supervised fine-tuning (SFT) is commonly used for adaptation. Subsequent studies further introduce preference learning to incorporate negative samples into the training process. However, existing methods rely on sequence-level, offline-generated negatives, making them less discriminative and informative when adapting LLMs to recommendation tasks with large negative item spaces. To address these challenges, we propose ILRec, a novel preference fine-tuning framework for LLM-based recommendation, leveraging self-hard negative signals extracted from intermediate layers to improve preference learning. Specifically, we identify self-hard negative tokens from intermediate layers as fine-grained negative supervision that dynamically reflects the model's preference learning process. To effectively integrate these signals into training, we design a two-stage framework comprising cross-layer preference optimization and cross-layer preference distillation, enabling the model to jointly discriminate informative negatives and enhance the quality of negative signals from intermediate layers. In addition, we introduce a lightweight collaborative filtering model to assign token-level rewards for negative signals, mitigating the risk of over-penalizing false negatives. Extensive experiments on three datasets demonstrate ILRec's effectiveness in enhancing the performance of LLM-based recommender systems.
A Hybrid Early-Exit Algorithm for Large Language Models Based on Space Alignment Decoding (SPADE)
Jul 23, 2025Large language models are computationally expensive due to their deep structures. Prior research has shown that intermediate layers contain sufficient information to generate accurate answers, leading to the development of early-exit algorithms that reduce inference costs by terminating computation at earlier layers. However, these methods often suffer from poor performance due to misalignment between intermediate and output layer representations that lead to decoding inaccuracy. To address these challenges, we propose SPADE (SPace Alignment DEcoding), a novel decoding method that aligns intermediate layer representations with the output layer by propagating a minimally reduced sequence consisting of only the start token and the answer token. We further optimize the early-exit decision-making process by training a linear approximation of SPADE that computes entropy-based confidence metrics. Putting them together, we create a hybrid early-exit algorithm that monitors confidence levels and stops inference at intermediate layers while using SPADE to generate high-quality outputs. This approach significantly reduces inference costs without compromising accuracy, offering a scalable and efficient solution for deploying large language models in real-world applications.
Integrated Pipeline for Monocular 3D Reconstruction and Finite Element Simulation in Industrial Applications
Jun 16, 2025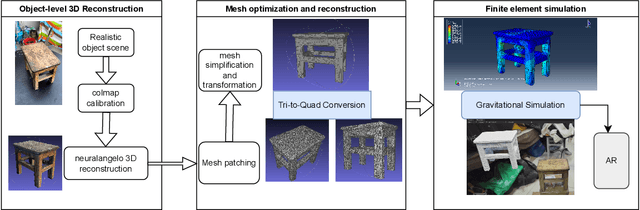

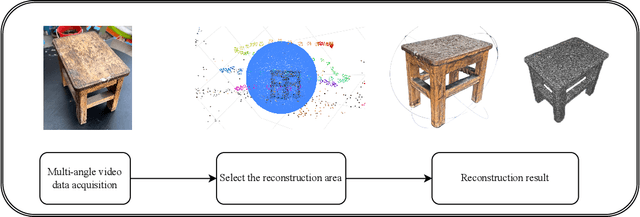

To address the challenges of 3D modeling and structural simulation in industrial environment, such as the difficulty of equipment deployment, and the difficulty of balancing accuracy and real-time performance, this paper proposes an integrated workflow, which integrates high-fidelity 3D reconstruction based on monocular video, finite element simulation analysis, and mixed reality visual display, aiming to build an interactive digital twin system for industrial inspection, equipment maintenance and other scenes. Firstly, the Neuralangelo algorithm based on deep learning is used to reconstruct the 3D mesh model with rich details from the surround-shot video. Then, the QuadRemesh tool of Rhino is used to optimize the initial triangular mesh and generate a structured mesh suitable for finite element analysis. The optimized mesh is further discretized by HyperMesh, and the material parameter setting and stress simulation are carried out in Abaqus to obtain high-precision stress and deformation results. Finally, combined with Unity and Vuforia engine, the real-time superposition and interactive operation of simulation results in the augmented reality environment are realized, which improves users 'intuitive understanding of structural response. Experiments show that the method has good simulation efficiency and visualization effect while maintaining high geometric accuracy. It provides a practical solution for digital modeling, mechanical analysis and interactive display in complex industrial scenes, and lays a foundation for the deep integration of digital twin and mixed reality technology in industrial applications.