 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Speed Detector For Low-Powered Devices In Aerial Grasping
Mar 01, 2024



Autonomous aerial harvesting is a highly complex problem because it requires numerous interdisciplinary algorithms to be executed on mini low-powered computing devices. Object detection is one such algorithm that is compute-hungry. In this context, we make the following contributions: (i) Fast Fruit Detector (FFD), a resource-efficient, single-stage, and postprocessing-free object detector based on our novel latent object representation (LOR) module, query assignment, and prediction strategy. FFD achieves 100FPS@FP32 precision on the latest 10W NVIDIA Jetson-NX embedded device while co-existing with other time-critical sub-systems such as control, grasping, SLAM, a major achievement of this work. (ii) a method to generate vast amounts of training data without exhaustive manual labelling of fruit images since they consist of a large number of instances, which increases the labelling cost and time. (iii) an open-source fruit detection dataset having plenty of very small-sized instances that are difficult to detect. Our exhaustive evaluations on our and MinneApple dataset show that FFD, being only a single-scale detector, is more accurate than many representative detectors, e.g. FFD is better than single-scale Faster-RCNN by 10.7AP, multi-scale Faster-RCNN by 2.3AP, and better than latest single-scale YOLO-v8 by 8AP and multi-scale YOLO-v8 by 0.3 while being considerably faster.
Improving search relevance of Azure Cognitive Search by Bayesian optimization
Dec 13, 2023



Azure Cognitive Search (ACS) has emerged as a major contender in "Search as a Service" cloud products in recent years. However, one of the major challenges for ACS users is to improve the relevance of the search results for their specific usecases. In this paper, we propose a novel method to find the optimal ACS configuration that maximizes search relevance for a specific usecase (product search, document search...) The proposed solution improves key online marketplace metrics such as click through rates (CTR) by formulating the search relevance problem as hyperparameter tuning. We have observed significant improvements in real-world search call to action (CTA) rate in multiple marketplaces by introducing optimized weights generated from the proposed approach.
Learning Vision-based Pursuit-Evasion Robot Policies
Aug 30, 2023Learning strategic robot behavior -- like that required in pursuit-evasion interactions -- under real-world constraints is extremely challenging. It requires exploiting the dynamics of the interaction, and planning through both physical state and latent intent uncertainty. In this paper, we transform this intractable problem into a supervised learning problem, where a fully-observable robot policy generates supervision for a partially-observable one. We find that the quality of the supervision signal for the partially-observable pursuer policy depends on two key factors: the balance of diversity and optimality of the evader's behavior and the strength of the modeling assumptions in the fully-observable policy. We deploy our policy on a physical quadruped robot with an RGB-D camera on pursuit-evasion interactions in the wild. Despite all the challenges, the sensing constraints bring about creativity: the robot is pushed to gather information when uncertain, predict intent from noisy measurements, and anticipate in order to intercept. Project webpage: https://abajcsy.github.io/vision-based-pursuit/
More Than an Arm: Using a Manipulator as a Tail for Enhanced Stability in Legged Locomotion
May 02, 2023



Is a manipulator on a legged robot a liability or an asset for locomotion? Prior works mainly designed specific controllers to account for the added payload and inertia from a manipulator. In contrast, biological systems typically benefit from additional limbs, which can simplify postural control. For instance, cats use their tails to enhance the stability of their bodies and prevent falls under disturbances. In this work, we show that a manipulator can be an important asset for maintaining balance during locomotion. To do so, we train a sensorimotor policy using deep reinforcement learning to create a synergy between the robot's limbs. This policy enables the robot to maintain stability despite large disturbances. However, learning such a controller can be quite challenging. To account for these challenges, we propose a stage-wise training procedure to learn complex behaviors. Our proposed method decomposes this complex task into three stages and then incrementally learns these tasks to arrive at a single policy capable of solving the final control task, achieving a success rate up to 2.35 times higher than baselines in simulation. We deploy our learned policy in the real world and show stability during locomotion under strong disturbances.
Legs as Manipulator: Pushing Quadrupedal Agility Beyond Locomotion
Mar 22, 2023Locomotion has seen dramatic progress for walking or running across challenging terrains. However, robotic quadrupeds are still far behind their biological counterparts, such as dogs, which display a variety of agile skills and can use the legs beyond locomotion to perform several basic manipulation tasks like interacting with objects and climbing. In this paper, we take a step towards bridging this gap by training quadruped robots not only to walk but also to use the front legs to climb walls, press buttons, and perform object interaction in the real world. To handle this challenging optimization, we decouple the skill learning broadly into locomotion, which involves anything that involves movement whether via walking or climbing a wall, and manipulation, which involves using one leg to interact while balancing on the other three legs. These skills are trained in simulation using curriculum and transferred to the real world using our proposed sim2real variant that builds upon recent locomotion success. Finally, we combine these skills into a robust long-term plan by learning a behavior tree that encodes a high-level task hierarchy from one clean expert demonstration. We evaluate our method in both simulation and real-world showing successful executions of both short as well as long-range tasks and how robustness helps confront external perturbations. Videos at https://robot-skills.github.io
Offline Robot Reinforcement Learning with Uncertainty-Guided Human Expert Sampling
Dec 16, 2022Recent advances in batch (offline) reinforcement learning have shown promising results in learning from available offline data and proved offline reinforcement learning to be an essential toolkit in learning control policies in a model-free setting. An offline reinforcement learning algorithm applied to a dataset collected by a suboptimal non-learning-based algorithm can result in a policy that outperforms the behavior agent used to collect the data. Such a scenario is frequent in robotics, where existing automation is collecting operational data. Although offline learning techniques can learn from data generated by a sub-optimal behavior agent, there is still an opportunity to improve the sample complexity of existing offline reinforcement learning algorithms by strategically introducing human demonstration data into the training process. To this end, we propose a novel approach that uses uncertainty estimation to trigger the injection of human demonstration data and guide policy training towards optimal behavior while reducing overall sample complexity. Our experiments show that this approach is more sample efficient when compared to a naive way of combining expert data with data collected from a sub-optimal agent. We augmented an existing offline reinforcement learning algorithm Conservative Q-Learning with our approach and performed experiments on data collected from MuJoCo and OffWorld Gym learning environments.
Legged Locomotion in Challenging Terrains using Egocentric Vision
Nov 14, 2022Animals are capable of precise and agile locomotion using vision. Replicating this ability has been a long-standing goal in robotics. The traditional approach has been to decompose this problem into elevation mapping and foothold planning phases. The elevation mapping, however, is susceptible to failure and large noise artifacts, requires specialized hardware, and is biologically implausible. In this paper, we present the first end-to-end locomotion system capable of traversing stairs, curbs, stepping stones, and gaps. We show this result on a medium-sized quadruped robot using a single front-facing depth camera. The small size of the robot necessitates discovering specialized gait patterns not seen elsewhere. The egocentric camera requires the policy to remember past information to estimate the terrain under its hind feet. We train our policy in simulation. Training has two phases - first, we train a policy using reinforcement learning with a cheap-to-compute variant of depth image and then in phase 2 distill it into the final policy that uses depth using supervised learning. The resulting policy transfers to the real world and is able to run in real-time on the limited compute of the robot. It can traverse a large variety of terrain while being robust to perturbations like pushes, slippery surfaces, and rocky terrain. Videos are at https://vision-locomotion.github.io
Learning Visual Locomotion with Cross-Modal Supervision
Nov 07, 2022In this work, we show how to learn a visual walking policy that only uses a monocular RGB camera and proprioception. Since simulating RGB is hard, we necessarily have to learn vision in the real world. We start with a blind walking policy trained in simulation. This policy can traverse some terrains in the real world but often struggles since it lacks knowledge of the upcoming geometry. This can be resolved with the use of vision. We train a visual module in the real world to predict the upcoming terrain with our proposed algorithm Cross-Modal Supervision (CMS). CMS uses time-shifted proprioception to supervise vision and allows the policy to continually improve with more real-world experience. We evaluate our vision-based walking policy over a diverse set of terrains including stairs (up to 19cm high), slippery slopes (inclination of 35 degrees), curbs and tall steps (up to 20cm), and complex discrete terrains. We achieve this performance with less than 30 minutes of real-world data. Finally, we show that our policy can adapt to shifts in the visual field with a limited amount of real-world experience. Video results and code at https://antonilo.github.io/vision_locomotion/.
In-Hand Object Rotation via Rapid Motor Adaptation
Oct 10, 2022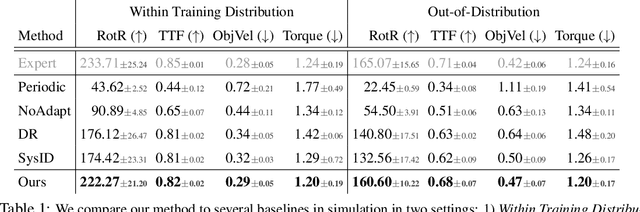


Generalized in-hand manipulation has long been an unsolved challenge of robotics. As a small step towards this grand goal, we demonstrate how to design and learn a simple adaptive controller to achieve in-hand object rotation using only fingertips. The controller is trained entirely in simulation on only cylindrical objects, which then - without any fine-tuning - can be directly deployed to a real robot hand to rotate dozens of objects with diverse sizes, shapes, and weights over the z-axis. This is achieved via rapid online adaptation of the controller to the object properties using only proprioception history. Furthermore, natural and stable finger gaits automatically emerge from training the control policy via reinforcement learning. Code and more videos are available at https://haozhi.io/hora
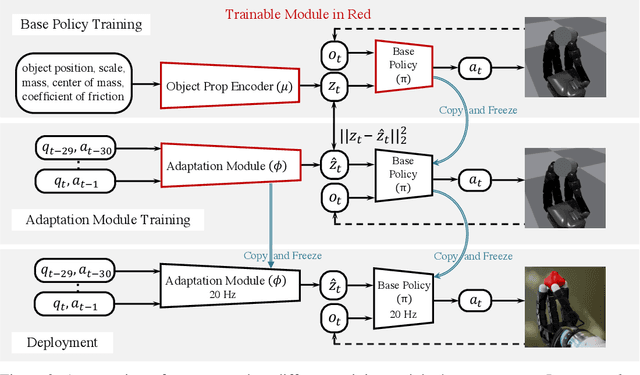
A Zero-Shot Adaptive Quadcopter Controller
Sep 19, 2022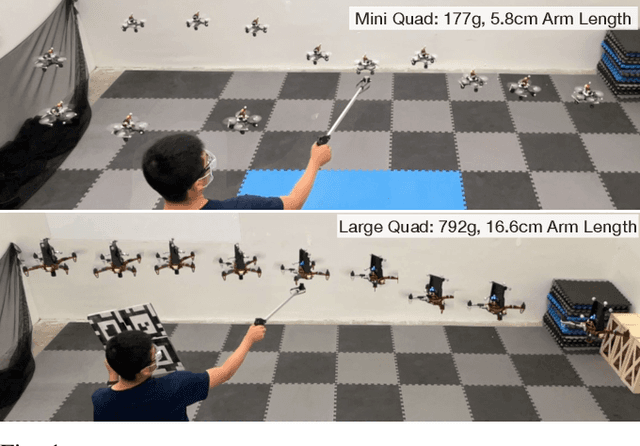

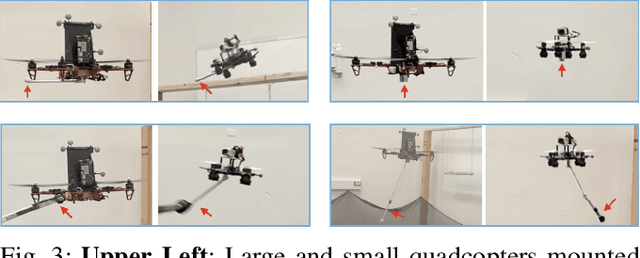

This paper proposes a universal adaptive controller for quadcopters, which can be deployed zero-shot to quadcopters of very different mass, arm lengths and motor constants, and also shows rapid adaptation to unknown disturbances during runtime. The core algorithmic idea is to learn a single policy that can adapt online at test time not only to the disturbances applied to the drone, but also to the robot dynamics and hardware in the same framework. We achieve this by training a neural network to estimate a latent representation of the robot and environment parameters, which is used to condition the behaviour of the controller, also represented as a neural network. We train both networks exclusively in simulation with the goal of flying the quadcopters to goal positions and avoiding crashes to the ground. We directly deploy the same controller trained in the simulation without any modifications on two quadcopters with differences in mass, inertia, and maximum motor speed of up to 4 times. In addition, we show rapid adaptation to sudden and large disturbances (up to 35.7%) in the mass and inertia of the quadcopters. We perform an extensive evaluation in both simulation and the physical world, where we outperform a state-of-the-art learning-based adaptive controller and a traditional PID controller specifically tuned to each platform individually. Video results can be found at https://dz298.github.io/universal-drone-controller/.