 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Tabula-Rasa: a Modular Reinforcement Learning Approach for Physically Embedded 3D Sokoban
Oct 03, 2020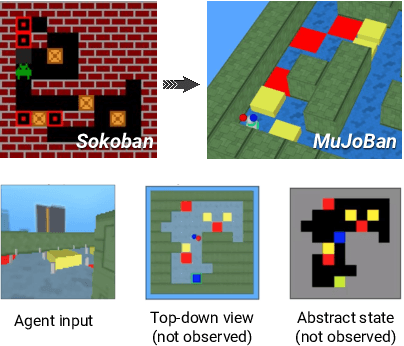
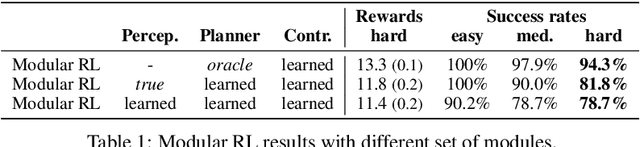

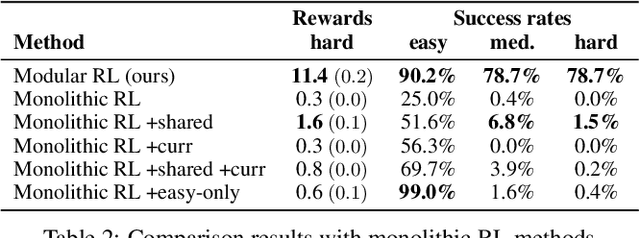
Intelligent robots need to achieve abstract objectives using concrete, spatiotemporally complex sensory information and motor control. Tabula rasa deep reinforcement learning (RL) has tackled demanding tasks in terms of either visual, abstract, or physical reasoning, but solving these jointly remains a formidable challenge. One recent, unsolved benchmark task that integrates these challenges is Mujoban, where a robot needs to arrange 3D warehouses generated from 2D Sokoban puzzles. We explore whether integrated tasks like Mujoban can be solved by composing RL modules together in a sense-plan-act hierarchy, where modules have well-defined roles similarly to classic robot architectures. Unlike classic architectures that are typically model-based, we use only model-free modules trained with RL or supervised learning. We find that our modular RL approach dramatically outperforms the state-of-the-art monolithic RL agent on Mujoban. Further, learned modules can be reused when, e.g., using a different robot platform to solve the same task. Together our results give strong evidence for the importance of research into modular RL designs. Project website: https://sites.google.com/view/modular-rl/
Physically Embedded Planning Problems: New Challenges for Reinforcement Learning
Sep 11, 2020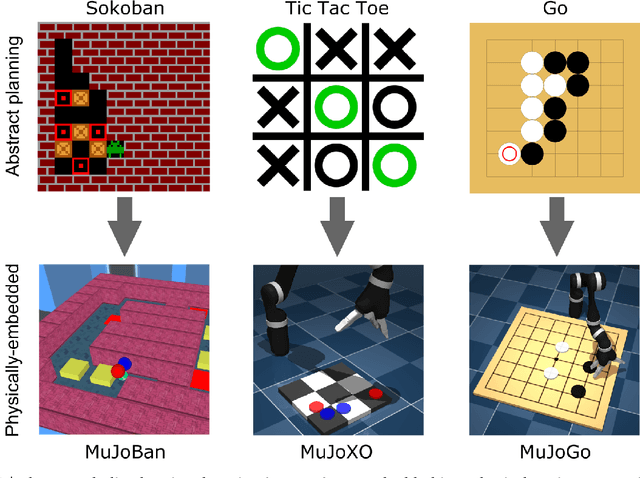

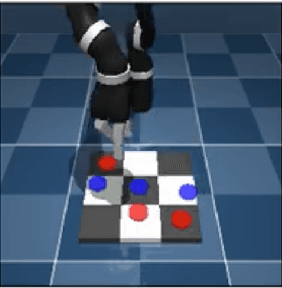
Recent work in deep reinforcement learning (RL) has produced algorithms capable of mastering challenging games such as Go, chess, or shogi. In these works the RL agent directly observes the natural state of the game and controls that state directly with its actions. However, when humans play such games, they do not just reason about the moves but also interact with their physical environment. They understand the state of the game by looking at the physical board in front of them and modify it by manipulating pieces using touch and fine-grained motor control. Mastering complicated physical systems with abstract goals is a central challenge for artificial intelligence, but it remains out of reach for existing RL algorithms. To encourage progress towards this goal we introduce a set of physically embedded planning problems and make them publicly available. We embed challenging symbolic tasks (Sokoban, tic-tac-toe, and Go) in a physics engine to produce a set of tasks that require perception, reasoning, and motor control over long time horizons. Although existing RL algorithms can tackle the symbolic versions of these tasks, we find that they struggle to master even the simplest of their physically embedded counterparts. As a first step towards characterizing the space of solution to these tasks, we introduce a strong baseline that uses a pre-trained expert game player to provide hints in the abstract space to an RL agent's policy while training it on the full sensorimotor control task. The resulting agent solves many of the tasks, underlining the need for methods that bridge the gap between abstract planning and embodied control.
Value-driven Hindsight Modelling
Feb 19, 2020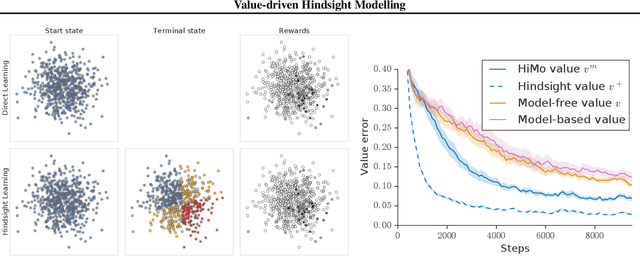
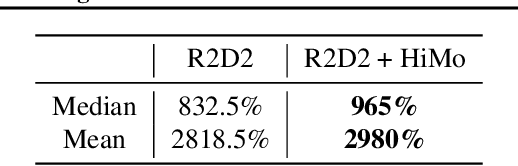
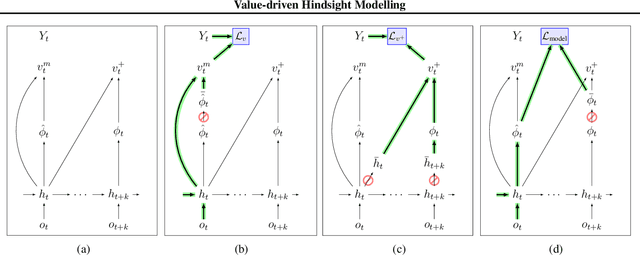
Value estimation is a critical component of the reinforcement learning (RL) paradigm. The question of how to effectively learn predictors for value from data is one of the major problems studied by the RL community, and different approaches exploit structure in the problem domain in different ways. Model learning can make use of the rich transition structure present in sequences of observations, but this approach is usually not sensitive to the reward function. In contrast, model-free methods directly leverage the quantity of interest from the future but have to compose with a potentially weak scalar signal (an estimate of the return). In this paper we develop an approach for representation learning in RL that sits in between these two extremes: we propose to learn what to model in a way that can directly help value prediction. To this end we determine which features of the future trajectory provide useful information to predict the associated return. This provides us with tractable prediction targets that are directly relevant for a task, and can thus accelerate learning of the value function. The idea can be understood as reasoning, in hindsight, about which aspects of the future observations could help past value prediction. We show how this can help dramatically even in simple policy evaluation settings. We then test our approach at scale in challenging domains, including on 57 Atari 2600 games.
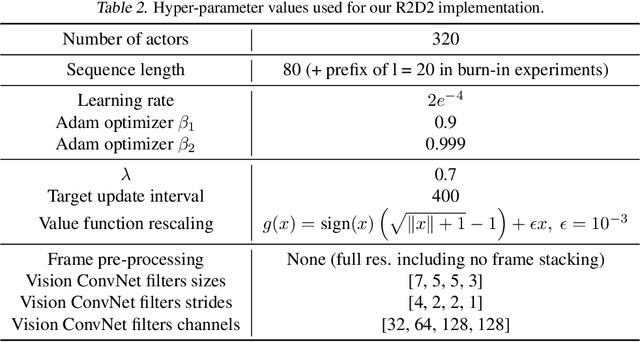
Mastering Atari, Go, Chess and Shogi by Planning with a Learned Model
Nov 19, 2019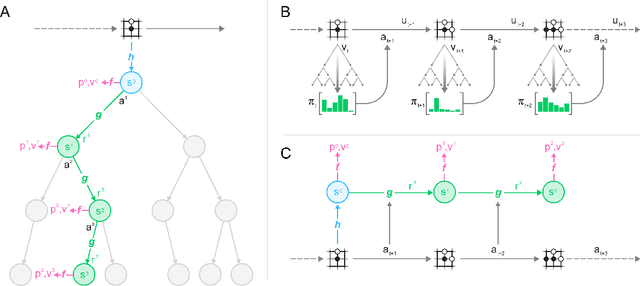
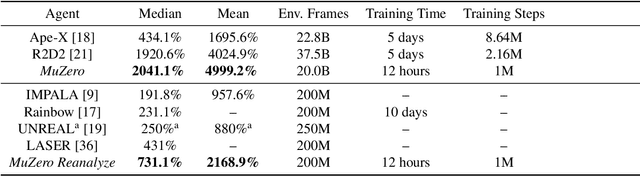
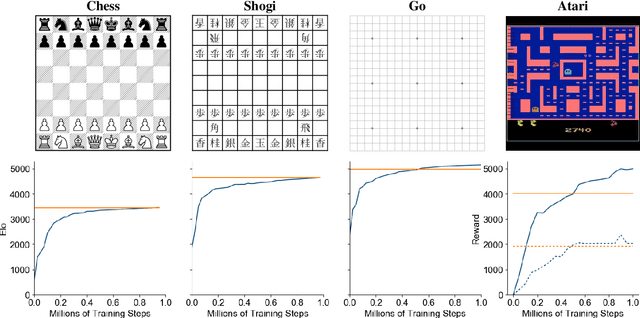
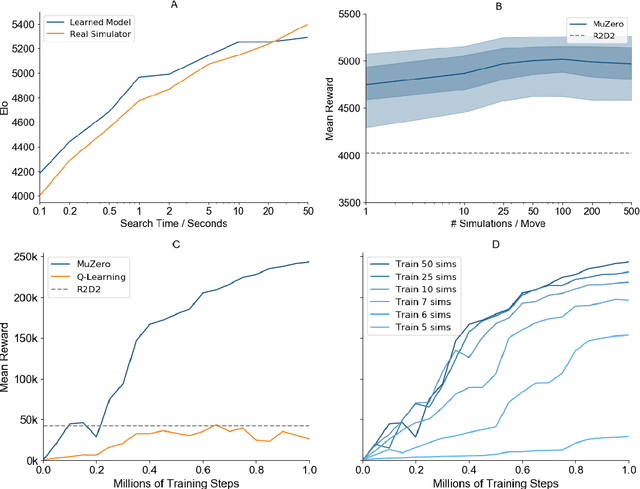
Constructing agents with planning capabilities has long been one of the main challenges in the pursuit of artificial intelligence. Tree-based planning methods have enjoyed huge success in challenging domains, such as chess and Go, where a perfect simulator is available. However, in real-world problems the dynamics governing the environment are often complex and unknown. In this work we present the MuZero algorithm which, by combining a tree-based search with a learned model, achieves superhuman performance in a range of challenging and visually complex domains, without any knowledge of their underlying dynamics. MuZero learns a model that, when applied iteratively, predicts the quantities most directly relevant to planning: the reward, the action-selection policy, and the value function. When evaluated on 57 different Atari games - the canonical video game environment for testing AI techniques, in which model-based planning approaches have historically struggled - our new algorithm achieved a new state of the art. When evaluated on Go, chess and shogi, without any knowledge of the game rules, MuZero matched the superhuman performance of the AlphaZero algorithm that was supplied with the game rules.
Augmenting learning using symmetry in a biologically-inspired domain
Oct 01, 2019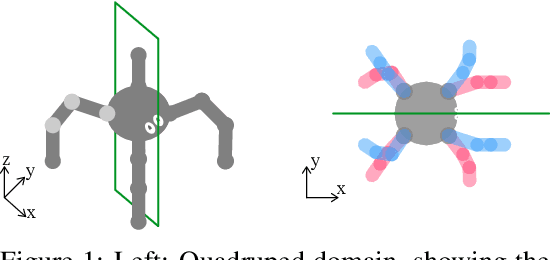
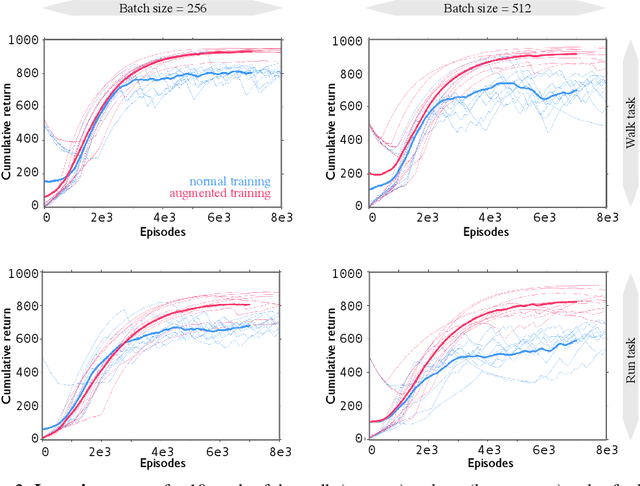
Invariances to translation, rotation and other spatial transformations are a hallmark of the laws of motion, and have widespread use in the natural sciences to reduce the dimensionality of systems of equations. In supervised learning, such as in image classification tasks, rotation, translation and scale invariances are used to augment training datasets. In this work, we use data augmentation in a similar way, exploiting symmetry in the quadruped domain of the DeepMind control suite (Tassa et al. 2018) to add to the trajectories experienced by the actor in the actor-critic algorithm of Abdolmaleki et al. (2018). In a data-limited regime, the agent using a set of experiences augmented through symmetry is able to learn faster. Our approach can be used to inject knowledge of invariances in the domain and task to augment learning in robots, and more generally, to speed up learning in realistic robotics applications.
An investigation of model-free planning
Jan 11, 2019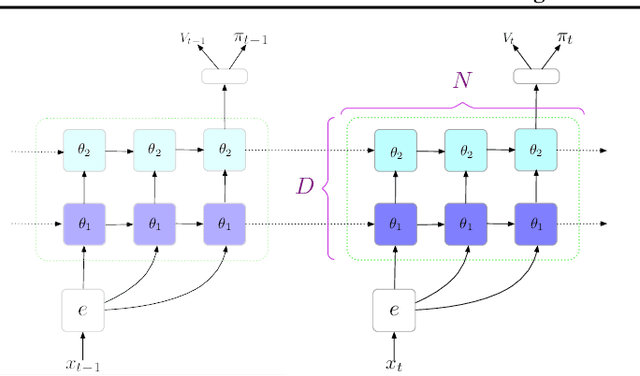
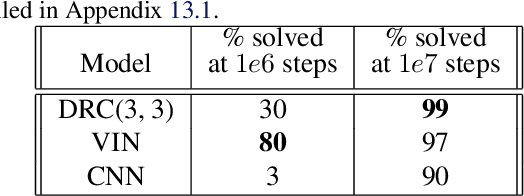
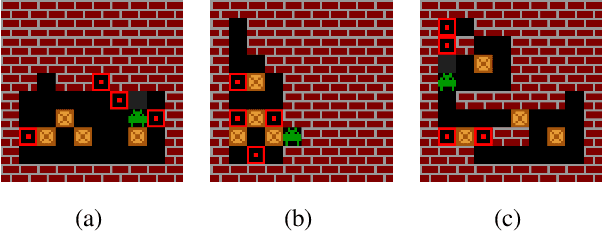
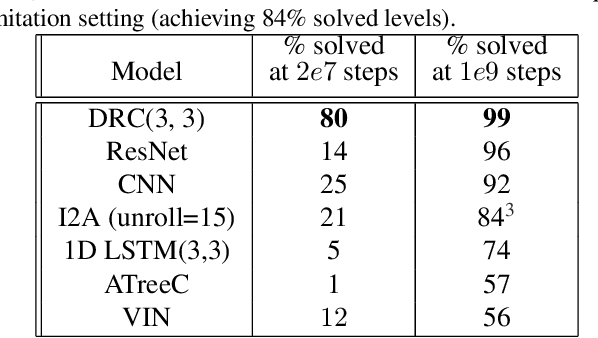
The field of reinforcement learning (RL) is facing increasingly challenging domains with combinatorial complexity. For an RL agent to address these challenges, it is essential that it can plan effectively. Prior work has typically utilized an explicit model of the environment, combined with a specific planning algorithm (such as tree search). More recently, a new family of methods have been proposed that learn how to plan, by providing the structure for planning via an inductive bias in the function approximator (such as a tree structured neural network), trained end-to-end by a model-free RL algorithm. In this paper, we go even further, and demonstrate empirically that an entirely model-free approach, without special structure beyond standard neural network components such as convolutional networks and LSTMs, can learn to exhibit many of the characteristics typically associated with a model-based planner. We measure our agent's effectiveness at planning in terms of its ability to generalize across a combinatorial and irreversible state space, its data efficiency, and its ability to utilize additional thinking time. We find that our agent has many of the characteristics that one might expect to find in a planning algorithm. Furthermore, it exceeds the state-of-the-art in challenging combinatorial domains such as Sokoban and outperforms other model-free approaches that utilize strong inductive biases toward planning.
Woulda, Coulda, Shoulda: Counterfactually-Guided Policy Search
Nov 15, 2018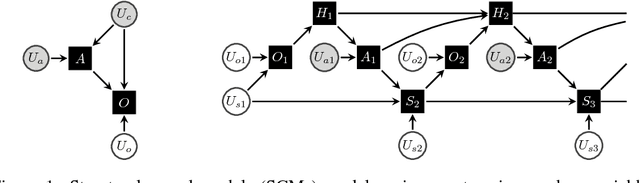
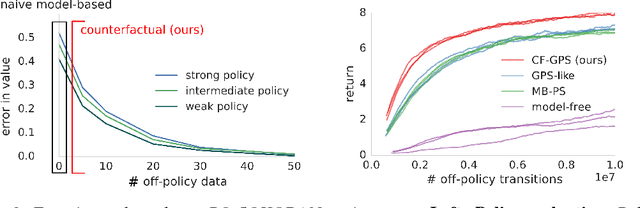
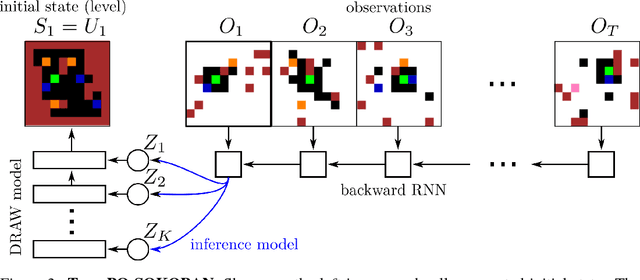
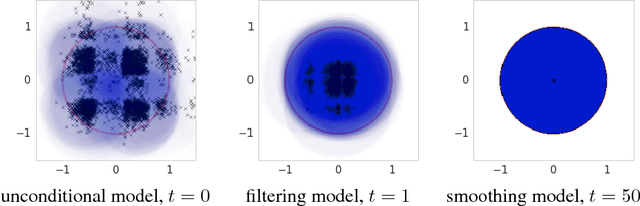
Learning policies on data synthesized by models can in principle quench the thirst of reinforcement learning algorithms for large amounts of real experience, which is often costly to acquire. However, simulating plausible experience de novo is a hard problem for many complex environments, often resulting in biases for model-based policy evaluation and search. Instead of de novo synthesis of data, here we assume logged, real experience and model alternative outcomes of this experience under counterfactual actions, actions that were not actually taken. Based on this, we propose the Counterfactually-Guided Policy Search (CF-GPS) algorithm for learning policies in POMDPs from off-policy experience. It leverages structural causal models for counterfactual evaluation of arbitrary policies on individual off-policy episodes. CF-GPS can improve on vanilla model-based RL algorithms by making use of available logged data to de-bias model predictions. In contrast to off-policy algorithms based on Importance Sampling which re-weight data, CF-GPS leverages a model to explicitly consider alternative outcomes, allowing the algorithm to make better use of experience data. We find empirically that these advantages translate into improved policy evaluation and search results on a non-trivial grid-world task. Finally, we show that CF-GPS generalizes the previously proposed Guided Policy Search and that reparameterization-based algorithms such Stochastic Value Gradient can be interpreted as counterfactual methods.
Learning to Search with MCTSnets
Jul 17, 2018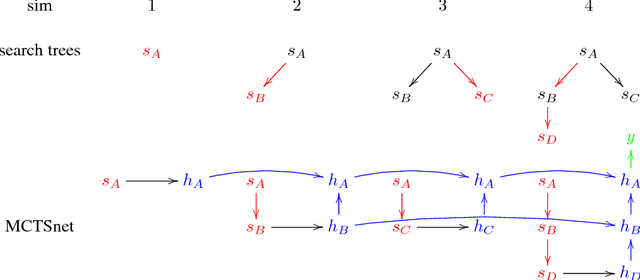
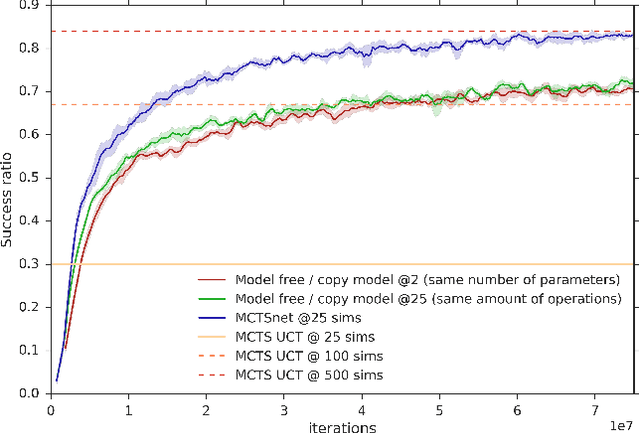
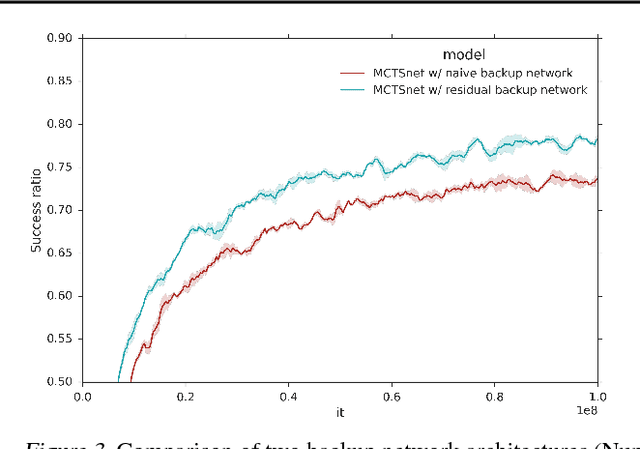
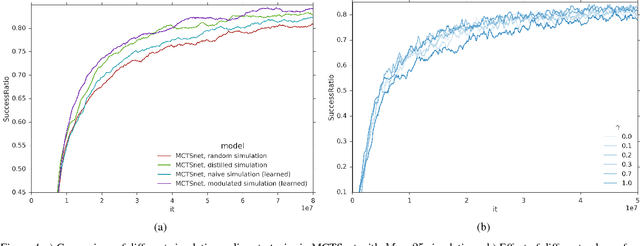
Planning problems are among the most important and well-studied problems in artificial intelligence. They are most typically solved by tree search algorithms that simulate ahead into the future, evaluate future states, and back-up those evaluations to the root of a search tree. Among these algorithms, Monte-Carlo tree search (MCTS) is one of the most general, powerful and widely used. A typical implementation of MCTS uses cleverly designed rules, optimized to the particular characteristics of the domain. These rules control where the simulation traverses, what to evaluate in the states that are reached, and how to back-up those evaluations. In this paper we instead learn where, what and how to search. Our architecture, which we call an MCTSnet, incorporates simulation-based search inside a neural network, by expanding, evaluating and backing-up a vector embedding. The parameters of the network are trained end-to-end using gradient-based optimisation. When applied to small searches in the well known planning problem Sokoban, the learned search algorithm significantly outperformed MCTS baselines.
Imagination-Augmented Agents for Deep Reinforcement Learning
Feb 14, 2018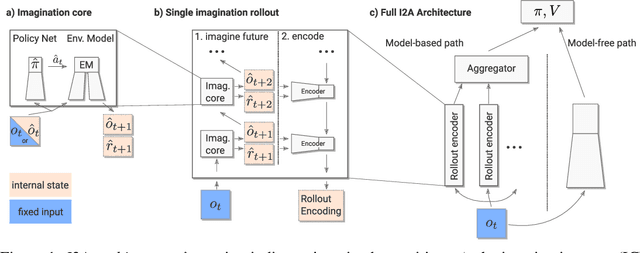
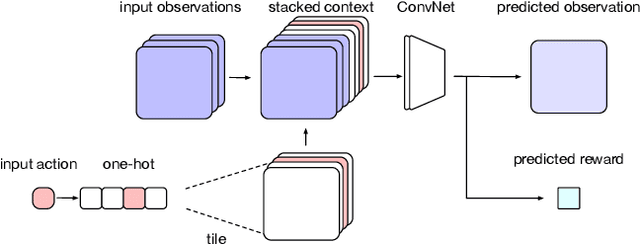


We introduce Imagination-Augmented Agents (I2As), a novel architecture for deep reinforcement learning combining model-free and model-based aspects. In contrast to most existing model-based reinforcement learning and planning methods, which prescribe how a model should be used to arrive at a policy, I2As learn to interpret predictions from a learned environment model to construct implicit plans in arbitrary ways, by using the predictions as additional context in deep policy networks. I2As show improved data efficiency, performance, and robustness to model misspecification compared to several baselines.
Mastering Chess and Shogi by Self-Play with a General Reinforcement Learning Algorithm
Dec 05, 2017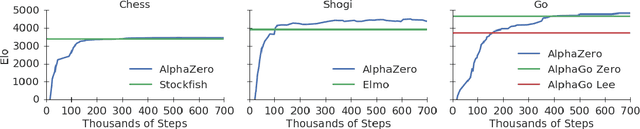
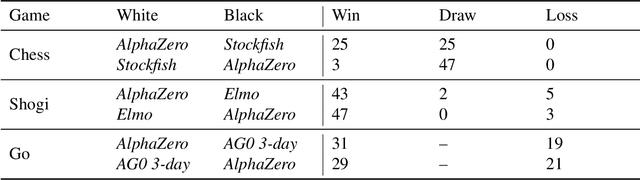
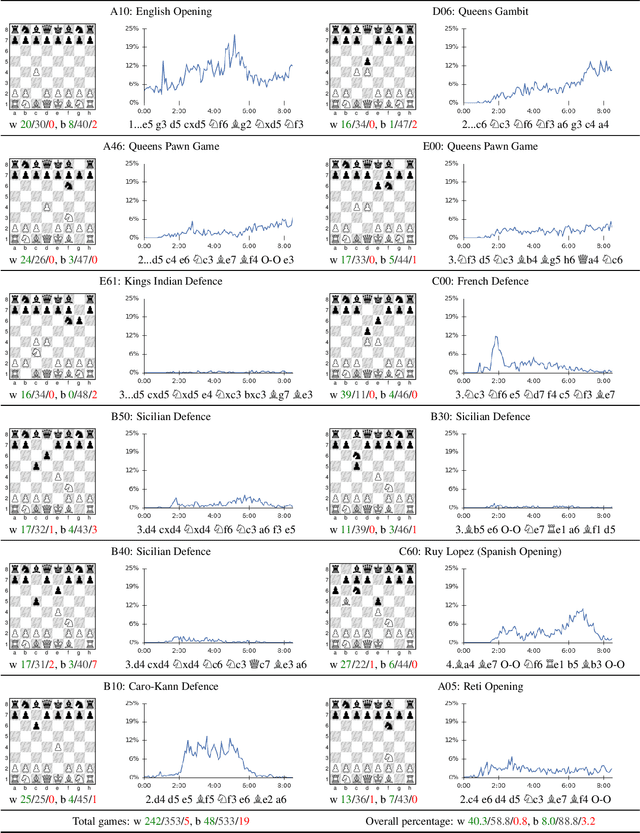
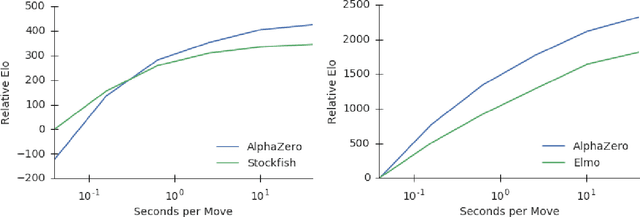
The game of chess is the most widely-studied domain in the history of artificial intelligence. The strongest programs are based on a combination of sophisticated search techniques, domain-specific adaptations, and handcrafted evaluation functions that have been refined by human experts over several decades. In contrast, the AlphaGo Zero program recently achieved superhuman performance in the game of Go, by tabula rasa reinforcement learning from games of self-play. In this paper, we generalise this approach into a single AlphaZero algorithm that can achieve, tabula rasa, superhuman performance in many challenging domains. Starting from random play, and given no domain knowledge except the game rules, AlphaZero achieved within 24 hours a superhuman level of play in the games of chess and shogi (Japanese chess) as well as Go, and convincingly defeated a world-champion program in each case.