 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Edge Storage Management Recipe with Zero-Shot Data Compression for Road Anomaly Detection
Jul 10, 2023
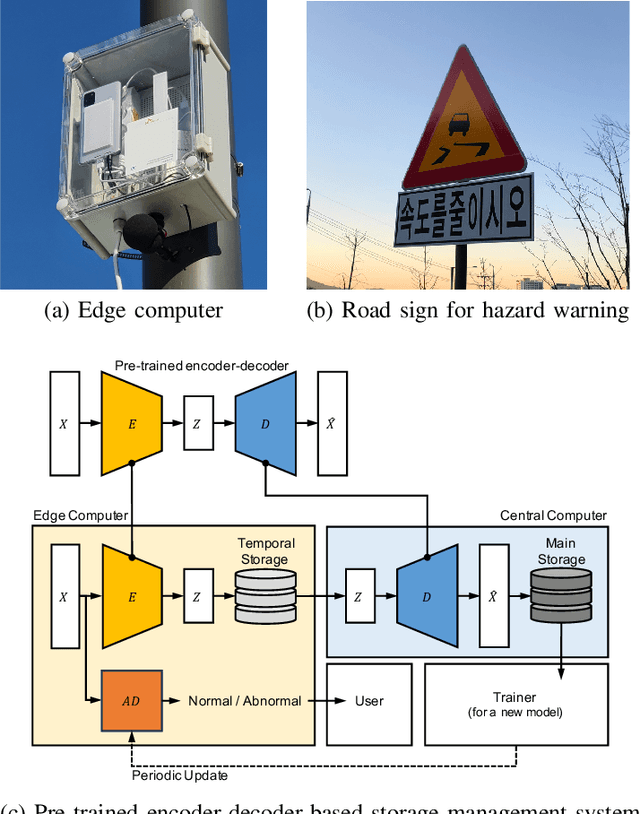
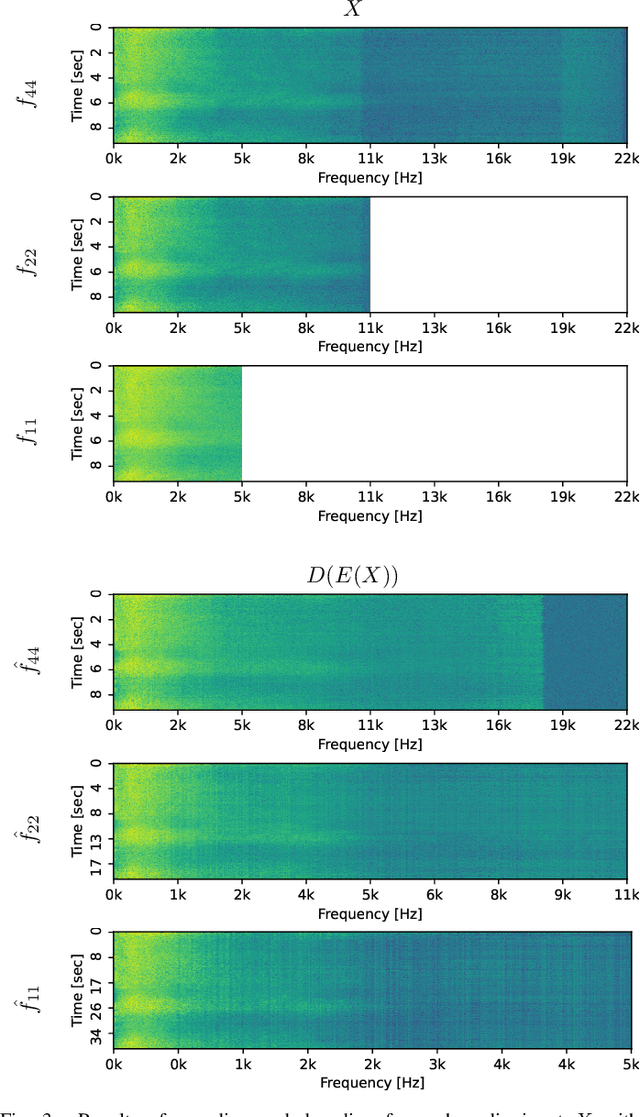
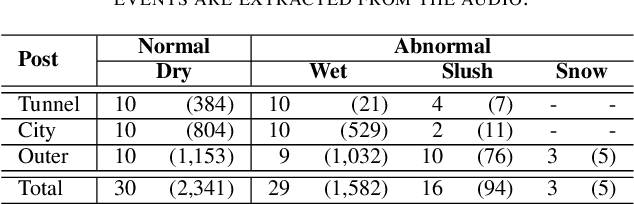
Recent studies show edge computing-based road anomaly detection systems which may also conduct data collection simultaneously. However, the edge computers will have small data storage but we need to store the collected audio samples for a long time in order to update existing models or develop a novel method. Therefore, we should consider an approach for efficient storage management methods while preserving high-fidelity audio. A hardware-perspective approach, such as using a low-resolution microphone, is an intuitive way to reduce file size but is not recommended because it fundamentally cuts off high-frequency components. On the other hand, a computational file compression approach that encodes collected high-resolution audio into a compact code should be recommended because it also provides a corresponding decoding method. Motivated by this, we propose a way of simple yet effective pre-trained autoencoder-based data compression method. The pre-trained autoencoder is trained for the purpose of audio super-resolution so it can be utilized to encode or decode any arbitrary sampling rate. Moreover, it will reduce the communication cost for data transmission from the edge to the central server. Via the comparative experiments, we confirm that the zero-shot audio compression and decompression highly preserve anomaly detection performance while enhancing storage and transmission efficiency.
Cobalt: Optimizing Mining Rewards in Proof-of-Work Network Games
Jul 10, 2023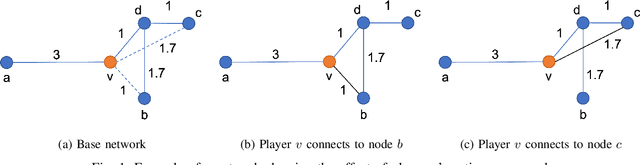
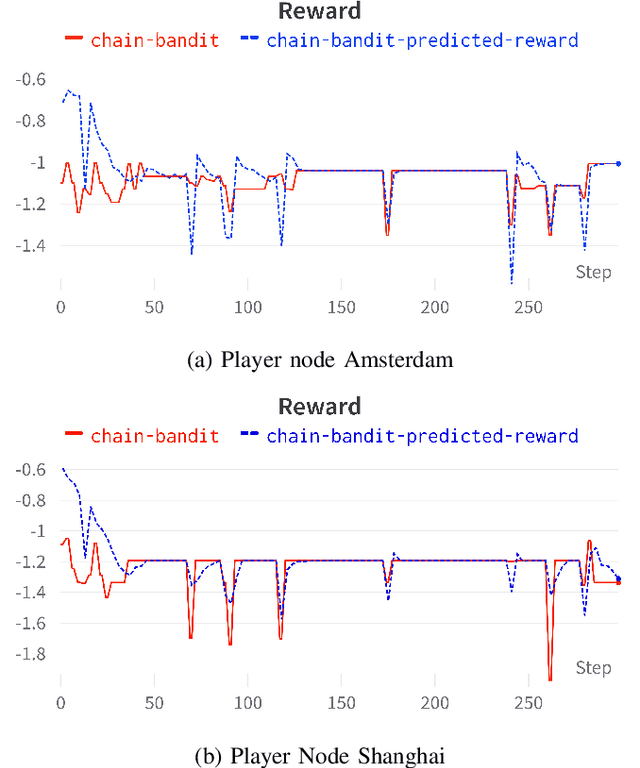
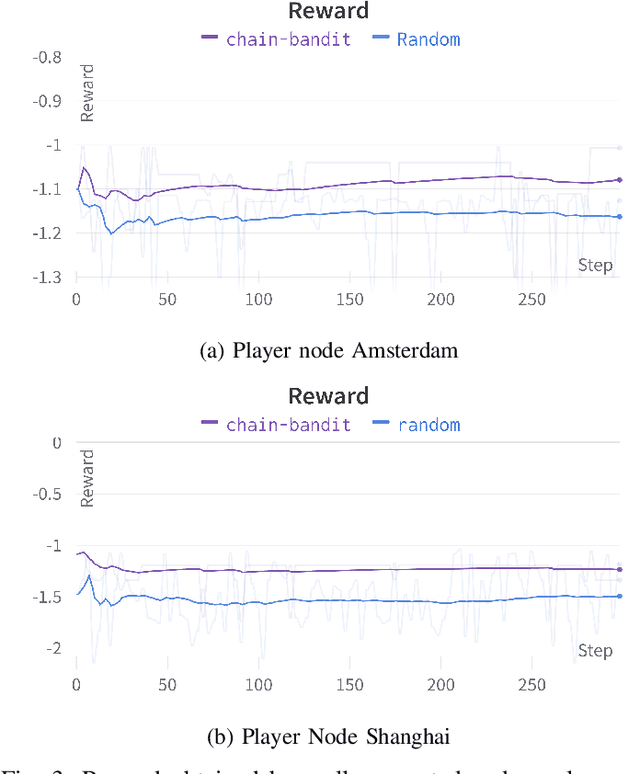

Mining in proof-of-work blockchains has become an expensive affair requiring specialized hardware capable of executing several megahashes per second at huge electricity costs. Miners earn a reward each time they mine a block within the longest chain, which helps offset their mining costs. It is therefore of interest to miners to maximize the number of mined blocks in the blockchain and increase revenue. A key factor affecting mining rewards earned is the connectivity between miners in the peer-to-peer network. To maximize rewards a miner must choose its network connections carefully, ensuring existence of paths to other miners that are on average of a lower latency compared to paths between other miners. We formulate the problem of deciding whom to connect to for miners as a combinatorial bandit problem. Each node picks its neighbors strategically to minimize the latency to reach 90\% of the hash power of the network relative to the 90-th percentile latency from other nodes. A key contribution of our work is the use of a network coordinates based model for learning the network structure within the bandit algorithm. Experimentally we show our proposed algorithm outperforming or matching baselines on diverse network settings.
Enabling Faster Locomotion of Planetary Rovers with a Mechanically-Hybrid Suspension
Jul 10, 2023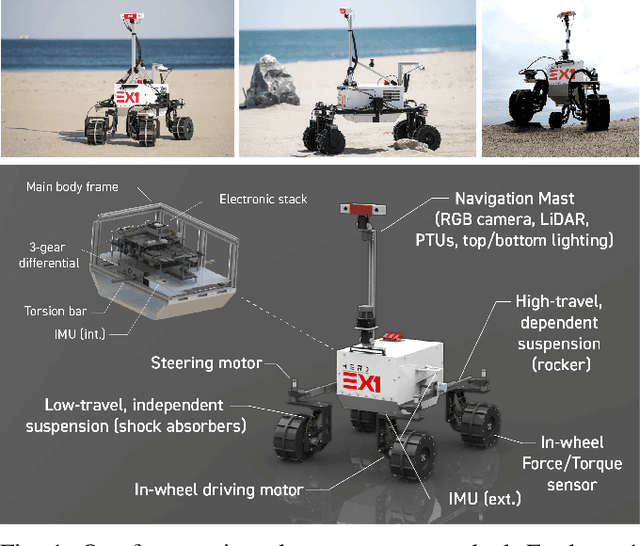
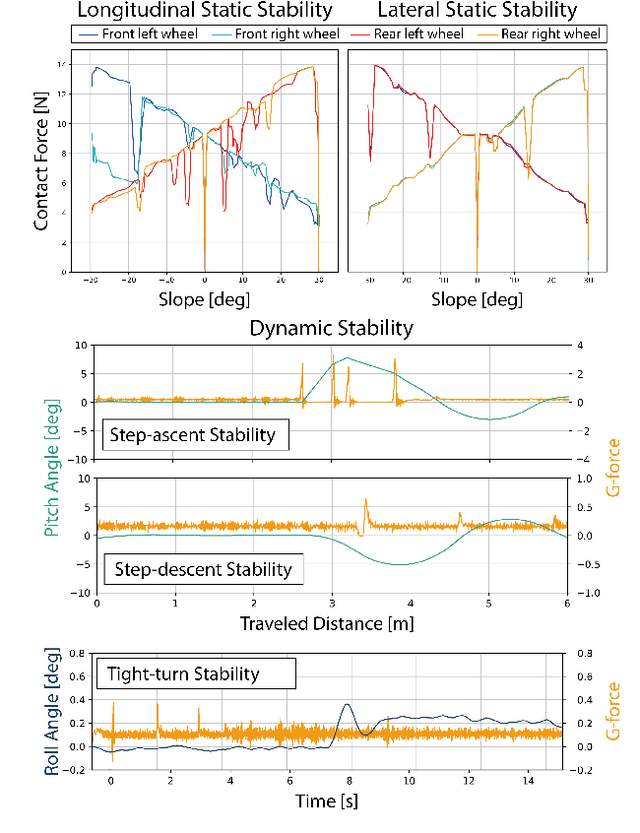
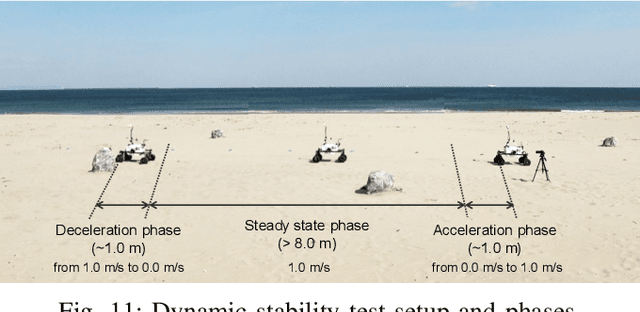

The exploration of the lunar poles and the collection of samples from the martian surface are characterized by shorter time windows demanding increased autonomy and speeds. Autonomous mobile robots must intrinsically cope with a wider range of disturbances. Faster off-road navigation has been explored for terrestrial applications but the combined effects of increased speeds and reduced gravity fields are yet to be fully studied. In this paper, we design and demonstrate a novel fully passive suspension design for wheeled planetary robots, which couples a high-range passive rocker with elastic in-wheel coil-over shock absorbers. The design was initially conceived and verified in a reduced-gravity (1.625 m/s$^2$) simulated environment, where three different passive suspension configurations were evaluated against a set of challenges--climbing steep slopes and surmounting unexpected obstacles like rocks and outcrops--and later prototyped and validated in a series of field tests. The proposed mechanically-hybrid suspension proves to mitigate more effectively the negative effects (high-frequency/high-amplitude vibrations and impact loads) of faster locomotion (>1 m/s) over unstructured terrains under varied gravity fields. This lowers the demand on navigation and control systems, impacting the efficiency of exploration missions in the years to come.
Distributed Decisions on Optimal Load Balancing in Loss Networks
Jul 10, 2023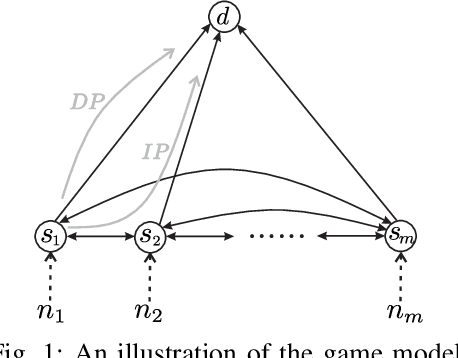
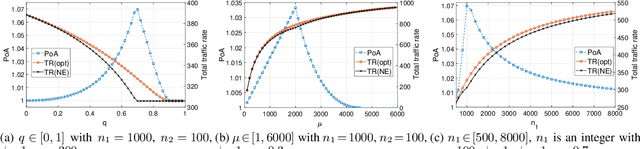
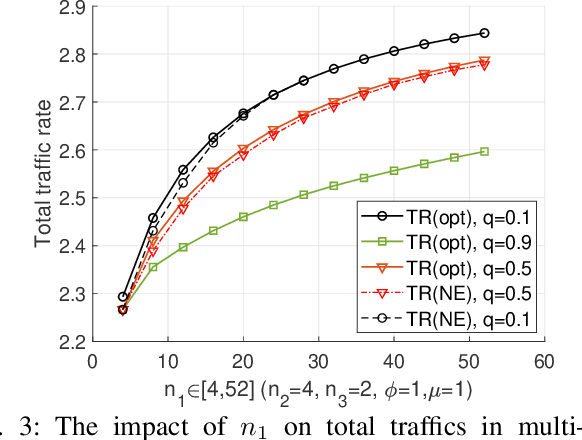
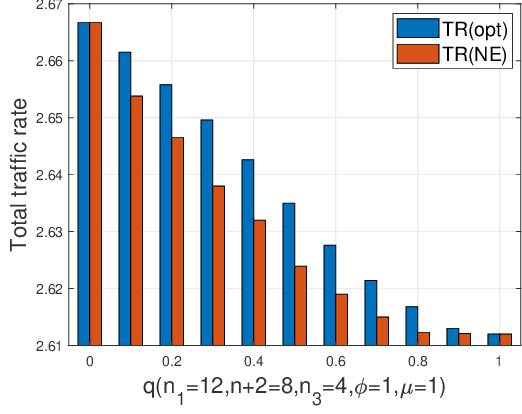
When multiple users share a common link in direct transmission, packet loss and network collision may occur due to the simultaneous arrival of traffics at the source node. To tackle this problem, users may resort to an indirect path: the packet flows are first relayed through a sidelink to another source node, then transmitted to the destination. This behavior brings the problems of packet routing or load balancing: (1) how to maximize the total traffic in a collaborative way; (2) how self-interested users choose routing strategies to minimize their individual packet loss independently. In this work, we propose a generalized mathematical framework to tackle the packet and load balancing issue in loss networks. In centralized scenarios with a planner, we provide a polynomial-time algorithm to compute the system optimum point where the total traffic rate is maximized. Conversely, in decentralized settings with autonomous users making distributed decisions, the system converges to an equilibrium where no user can reduce their loss probability through unilateral deviation. We thereby provide a full characterization of Nash equilibrium and examine the efficiency loss stemming from selfish behaviors, both theoretically and empirically. In general, the performance degradation caused by selfish behaviors is not catastrophic; however, this gap is not monotonic and can have extreme values in certain specific scenarios.
Code Generation for Machine Learning using Model-Driven Engineering and SysML
Jul 10, 2023
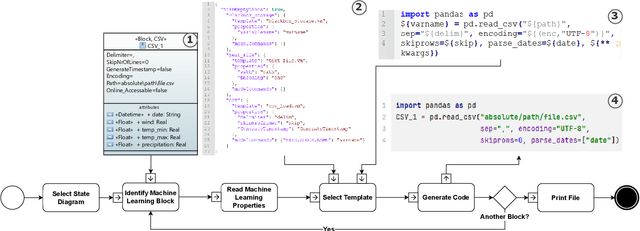
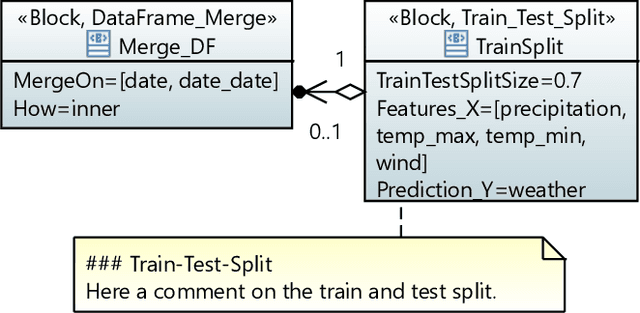
Data-driven engineering refers to systematic data collection and processing using machine learning to improve engineering systems. Currently, the implementation of data-driven engineering relies on fundamental data science and software engineering skills. At the same time, model-based engineering is gaining relevance for the engineering of complex systems. In previous work, a model-based engineering approach integrating the formalization of machine learning tasks using the general-purpose modeling language SysML is presented. However, formalized machine learning tasks still require the implementation in a specialized programming languages like Python. Therefore, this work aims to facilitate the implementation of data-driven engineering in practice by extending the previous work of formalizing machine learning tasks by integrating model transformation to generate executable code. The method focuses on the modifiability and maintainability of the model transformation so that extensions and changes to the code generation can be integrated without requiring modifications to the code generator. The presented method is evaluated for feasibility in a case study to predict weather forecasts. Based thereon, quality attributes of model transformations are assessed and discussed. Results demonstrate the flexibility and the simplicity of the method reducing efforts for implementation. Further, the work builds a theoretical basis for standardizing data-driven engineering implementation in practice.
PSDR-Room: Single Photo to Scene using Differentiable Rendering
Jul 06, 2023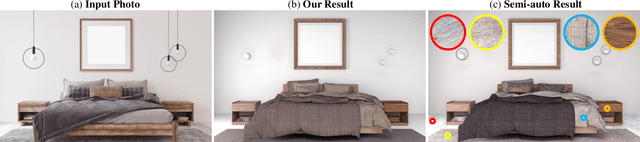
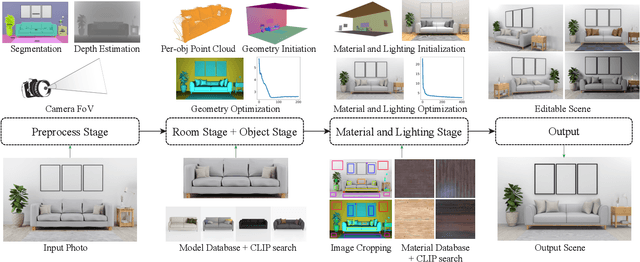
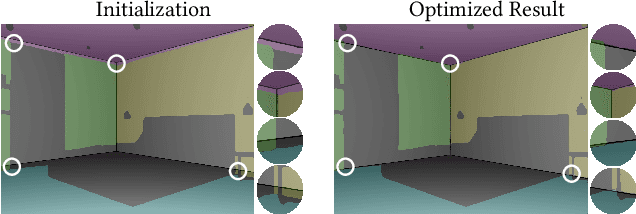
A 3D digital scene contains many components: lights, materials and geometries, interacting to reach the desired appearance. Staging such a scene is time-consuming and requires both artistic and technical skills. In this work, we propose PSDR-Room, a system allowing to optimize lighting as well as the pose and materials of individual objects to match a target image of a room scene, with minimal user input. To this end, we leverage a recent path-space differentiable rendering approach that provides unbiased gradients of the rendering with respect to geometry, lighting, and procedural materials, allowing us to optimize all of these components using gradient descent to visually match the input photo appearance. We use recent single-image scene understanding methods to initialize the optimization and search for appropriate 3D models and materials. We evaluate our method on real photographs of indoor scenes and demonstrate the editability of the resulting scene components.
Optimizing Bus Route Selection for University of Pittsburgh Students: A Comparative Analysis of Ridership, On-Time Performance, and Travel Distance
May 03, 2023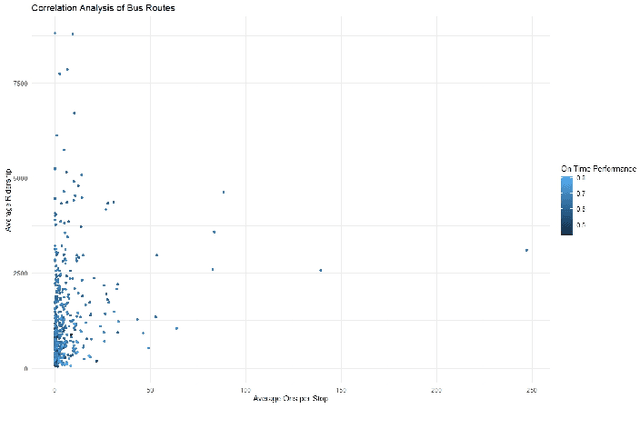
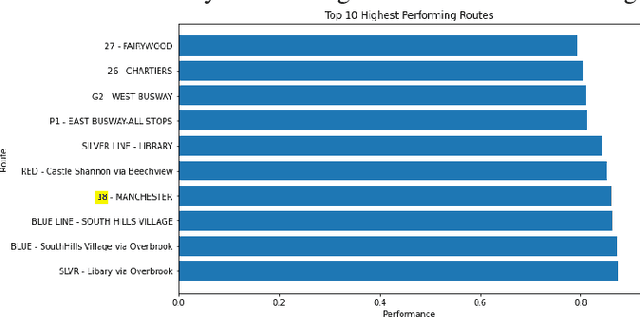
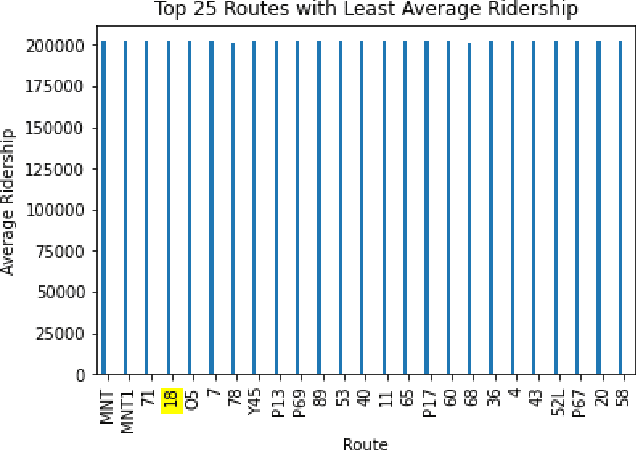
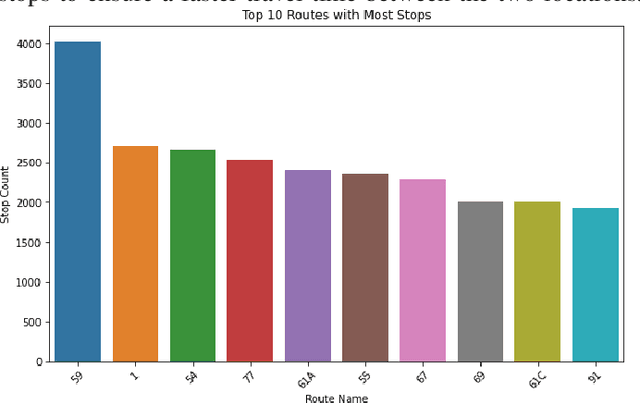
In this study, we present a comparative analysis of bus routes servicing the University of Pittsburgh to identify the most efficient options for students. We examine factors such as ridership, on-time performance, and travel distance to develop a comprehensive understanding of each route's performance. Our findings suggest that route 18 is the most effective for students, and we propose potential improvements to further optimize the transportation system.
Flexible and Fully Quantized Ultra-Lightweight TinyissimoYOLO for Ultra-Low-Power Edge Systems
Jul 14, 2023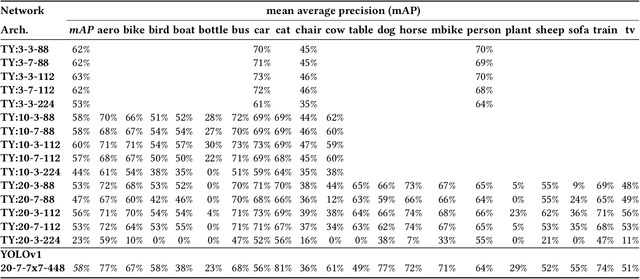
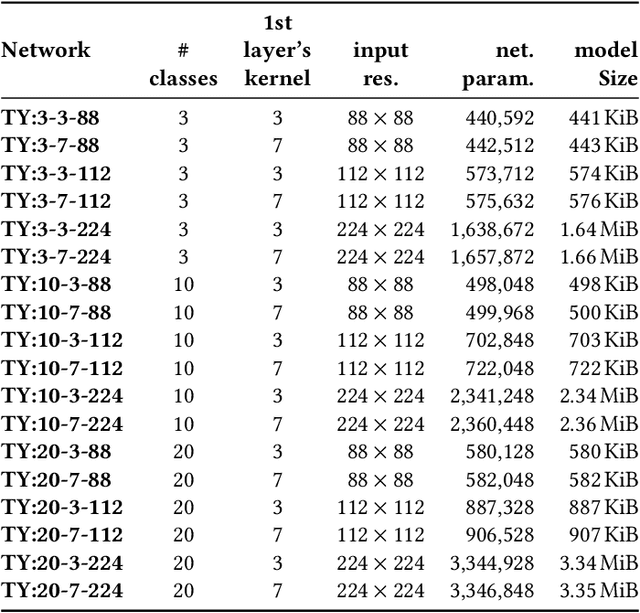
This paper deploys and explores variants of TinyissimoYOLO, a highly flexible and fully quantized ultra-lightweight object detection network designed for edge systems with a power envelope of a few milliwatts. With experimental measurements, we present a comprehensive characterization of the network's detection performance, exploring the impact of various parameters, including input resolution, number of object classes, and hidden layer adjustments. We deploy variants of TinyissimoYOLO on state-of-the-art ultra-low-power extreme edge platforms, presenting an in-depth a comparison on latency, energy efficiency, and their ability to efficiently parallelize the workload. In particular, the paper presents a comparison between a novel parallel RISC-V processor (GAP9 from Greenwaves) with and without use of its on-chip hardware accelerator, an ARM Cortex-M7 core (STM32H7 from ST Microelectronics), two ARM Cortex-M4 cores (STM32L4 from STM and Apollo4b from Ambiq), and a multi-core platform with a CNN hardware accelerator (Analog Devices MAX78000). Experimental results show that the GAP9's hardware accelerator achieves the lowest inference latency and energy at 2.12ms and 150uJ respectively, which is around 2x faster and 20% more efficient than the next best platform, the MAX78000. The hardware accelerator of GAP9 can even run an increased resolution version of TinyissimoYOLO with 112x112 pixels and 10 detection classes within 3.2ms, consuming 245uJ. To showcase the competitiveness of a versatile general-purpose system we also deployed and profiled a multi-core implementation on GAP9 at different operating points, achieving 11.3ms with the lowest-latency and 490uJ with the most energy-efficient configuration. With this paper, we demonstrate the suitability and flexibility of TinyissimoYOLO on state-of-the-art detection datasets for real-time ultra-low-power edge inference.
Re-ReND: Real-time Rendering of NeRFs across Devices
Mar 15, 2023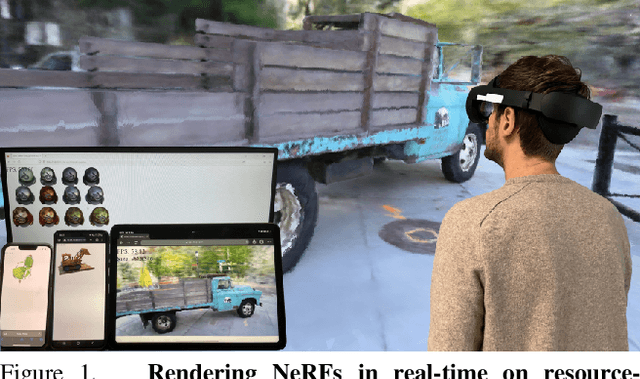
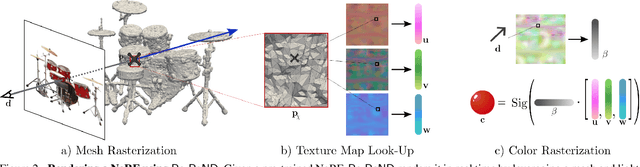
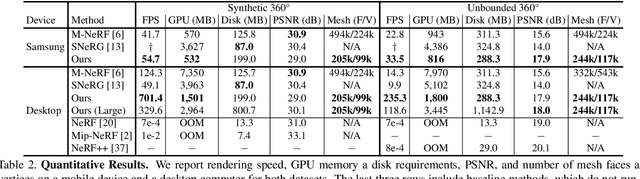
This paper proposes a novel approach for rendering a pre-trained Neural Radiance Field (NeRF) in real-time on resource-constrained devices. We introduce Re-ReND, a method enabling Real-time Rendering of NeRFs across Devices. Re-ReND is designed to achieve real-time performance by converting the NeRF into a representation that can be efficiently processed by standard graphics pipelines. The proposed method distills the NeRF by extracting the learned density into a mesh, while the learned color information is factorized into a set of matrices that represent the scene's light field. Factorization implies the field is queried via inexpensive MLP-free matrix multiplications, while using a light field allows rendering a pixel by querying the field a single time-as opposed to hundreds of queries when employing a radiance field. Since the proposed representation can be implemented using a fragment shader, it can be directly integrated with standard rasterization frameworks. Our flexible implementation can render a NeRF in real-time with low memory requirements and on a wide range of resource-constrained devices, including mobiles and AR/VR headsets. Notably, we find that Re-ReND can achieve over a 2.6-fold increase in rendering speed versus the state-of-the-art without perceptible losses in quality.
SoftED: Metrics for Soft Evaluation of Time Series Event Detection
Apr 02, 2023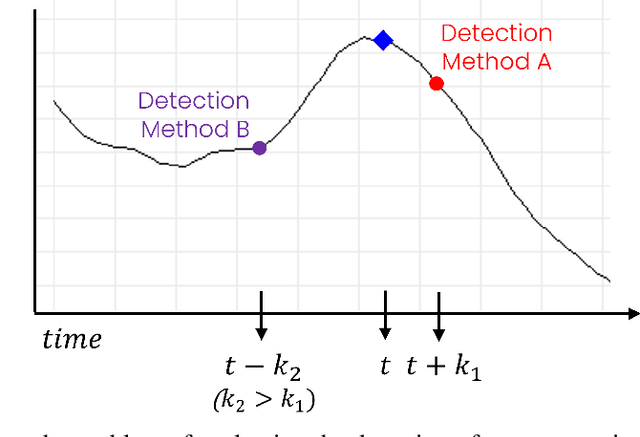
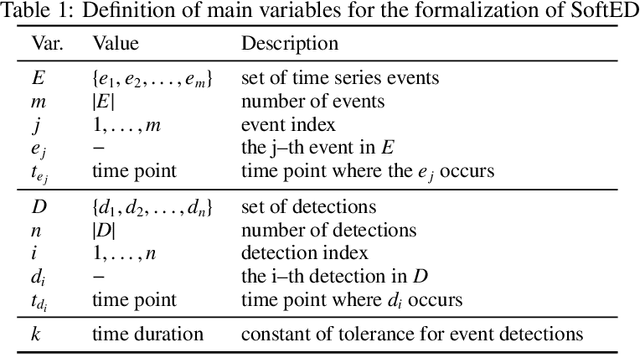
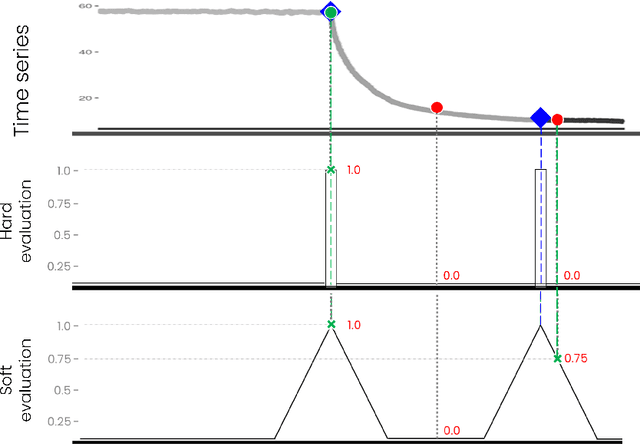
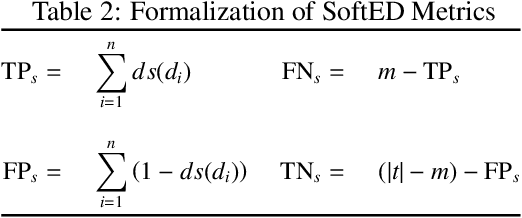
Time series event detection methods are evaluated mainly by standard classification metrics that focus solely on detection accuracy. However, inaccuracy in detecting an event can often result from its preceding or delayed effects reflected in neighboring detections. These detections are valuable to trigger necessary actions or help mitigate unwelcome consequences. In this context, current metrics are insufficient and inadequate for the context of event detection. There is a demand for metrics that incorporate both the concept of time and temporal tolerance for neighboring detections. This paper introduces SoftED metrics, a new set of metrics designed for soft evaluating event detection methods. They enable the evaluation of both detection accuracy and the degree to which their detections represent events. They improved event detection evaluation by associating events and their representative detections, incorporating temporal tolerance in over 36\% of experiments compared to the usual classification metrics. SoftED metrics were validated by domain specialists that indicated their contribution to detection evaluation and method selection.