 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFactored Latent Action World Models
Feb 18, 2026Learning latent actions from action-free video has emerged as a powerful paradigm for scaling up controllable world model learning. Latent actions provide a natural interface for users to iteratively generate and manipulate videos. However, most existing approaches rely on monolithic inverse and forward dynamics models that learn a single latent action to control the entire scene, and therefore struggle in complex environments where multiple entities act simultaneously. This paper introduces Factored Latent Action Model (FLAM), a factored dynamics framework that decomposes the scene into independent factors, each inferring its own latent action and predicting its own next-step factor value. This factorized structure enables more accurate modeling of complex multi-entity dynamics and improves video generation quality in action-free video settings compared to monolithic models. Based on experiments on both simulation and real-world multi-entity datasets, we find that FLAM outperforms prior work in prediction accuracy and representation quality, and facilitates downstream policy learning, demonstrating the benefits of factorized latent action models.
SkiLD: Unsupervised Skill Discovery Guided by Factor Interactions
Oct 24, 2024



Unsupervised skill discovery carries the promise that an intelligent agent can learn reusable skills through autonomous, reward-free environment interaction. Existing unsupervised skill discovery methods learn skills by encouraging distinguishable behaviors that cover diverse states. However, in complex environments with many state factors (e.g., household environments with many objects), learning skills that cover all possible states is impossible, and naively encouraging state diversity often leads to simple skills that are not ideal for solving downstream tasks. This work introduces Skill Discovery from Local Dependencies (Skild), which leverages state factorization as a natural inductive bias to guide the skill learning process. The key intuition guiding Skild is that skills that induce <b>diverse interactions</b> between state factors are often more valuable for solving downstream tasks. To this end, Skild develops a novel skill learning objective that explicitly encourages the mastering of skills that effectively induce different interactions within an environment. We evaluate Skild in several domains with challenging, long-horizon sparse reward tasks including a realistic simulated household robot domain, where Skild successfully learns skills with clear semantic meaning and shows superior performance compared to existing unsupervised reinforcement learning methods that only maximize state coverage.
Disentangled Unsupervised Skill Discovery for Efficient Hierarchical Reinforcement Learning
Oct 15, 2024



A hallmark of intelligent agents is the ability to learn reusable skills purely from unsupervised interaction with the environment. However, existing unsupervised skill discovery methods often learn entangled skills where one skill variable simultaneously influences many entities in the environment, making downstream skill chaining extremely challenging. We propose Disentangled Unsupervised Skill Discovery (DUSDi), a method for learning disentangled skills that can be efficiently reused to solve downstream tasks. DUSDi decomposes skills into disentangled components, where each skill component only affects one factor of the state space. Importantly, these skill components can be concurrently composed to generate low-level actions, and efficiently chained to tackle downstream tasks through hierarchical Reinforcement Learning. DUSDi defines a novel mutual-information-based objective to enforce disentanglement between the influences of different skill components, and utilizes value factorization to optimize this objective efficiently. Evaluated in a set of challenging environments, DUSDi successfully learns disentangled skills, and significantly outperforms previous skill discovery methods when it comes to applying the learned skills to solve downstream tasks. Code and skills visualization at jiahenghu.github.io/DUSDi-site/.
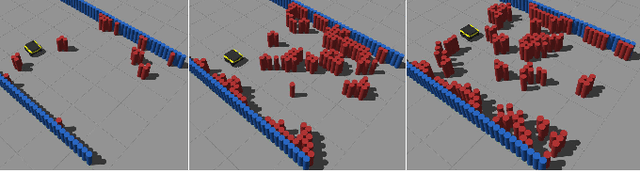
Dyna-LfLH: Learning Agile Navigation in Dynamic Environments from Learned Hallucination
Mar 25, 2024



This paper presents a self-supervised learning method to safely learn a motion planner for ground robots to navigate environments with dense and dynamic obstacles. When facing highly-cluttered, fast-moving, hard-to-predict obstacles, classical motion planners may not be able to keep up with limited onboard computation. For learning-based planners, high-quality demonstrations are difficult to acquire for imitation learning while reinforcement learning becomes inefficient due to the high probability of collision during exploration. To safely and efficiently provide training data, the Learning from Hallucination (LfH) approaches synthesize difficult navigation environments based on past successful navigation experiences in relatively easy or completely open ones, but unfortunately cannot address dynamic obstacles. In our new Dynamic Learning from Learned Hallucination (Dyna-LfLH), we design and learn a novel latent distribution and sample dynamic obstacles from it, so the generated training data can be used to learn a motion planner to navigate in dynamic environments. Dyna-LfLH is evaluated on a ground robot in both simulated and physical environments and achieves up to 25% better success rate compared to baselines.
Building Minimal and Reusable Causal State Abstractions for Reinforcement Learning
Jan 23, 2024



Two desiderata of reinforcement learning (RL) algorithms are the ability to learn from relatively little experience and the ability to learn policies that generalize to a range of problem specifications. In factored state spaces, one approach towards achieving both goals is to learn state abstractions, which only keep the necessary variables for learning the tasks at hand. This paper introduces Causal Bisimulation Modeling (CBM), a method that learns the causal relationships in the dynamics and reward functions for each task to derive a minimal, task-specific abstraction. CBM leverages and improves implicit modeling to train a high-fidelity causal dynamics model that can be reused for all tasks in the same environment. Empirical validation on manipulation environments and Deepmind Control Suite reveals that CBM's learned implicit dynamics models identify the underlying causal relationships and state abstractions more accurately than explicit ones. Furthermore, the derived state abstractions allow a task learner to achieve near-oracle levels of sample efficiency and outperform baselines on all tasks.
ELDEN: Exploration via Local Dependencies
Oct 12, 2023



Tasks with large state space and sparse rewards present a longstanding challenge to reinforcement learning. In these tasks, an agent needs to explore the state space efficiently until it finds a reward. To deal with this problem, the community has proposed to augment the reward function with intrinsic reward, a bonus signal that encourages the agent to visit interesting states. In this work, we propose a new way of defining interesting states for environments with factored state spaces and complex chained dependencies, where an agent's actions may change the value of one entity that, in order, may affect the value of another entity. Our insight is that, in these environments, interesting states for exploration are states where the agent is uncertain whether (as opposed to how) entities such as the agent or objects have some influence on each other. We present ELDEN, Exploration via Local DepENdencies, a novel intrinsic reward that encourages the discovery of new interactions between entities. ELDEN utilizes a novel scheme -- the partial derivative of the learned dynamics to model the local dependencies between entities accurately and computationally efficiently. The uncertainty of the predicted dependencies is then used as an intrinsic reward to encourage exploration toward new interactions. We evaluate the performance of ELDEN on four different domains with complex dependencies, ranging from 2D grid worlds to 3D robotic tasks. In all domains, ELDEN correctly identifies local dependencies and learns successful policies, significantly outperforming previous state-of-the-art exploration methods.
Learning to Correct Mistakes: Backjumping in Long-Horizon Task and Motion Planning
Nov 15, 2022



As robots become increasingly capable of manipulation and long-term autonomy, long-horizon task and motion planning problems are becoming increasingly important. A key challenge in such problems is that early actions in the plan may make future actions infeasible. When reaching a dead-end in the search, most existing planners use backtracking, which exhaustively reevaluates motion-level actions, often resulting in inefficient planning, especially when the search depth is large. In this paper, we propose to learn backjumping heuristics which identify the culprit action directly using supervised learning models to guide the task-level search. Based on evaluations on two different tasks, we find that our method significantly improves planning efficiency compared to backtracking and also generalizes to problems with novel numbers of objects.
Autonomous Ground Navigation in Highly Constrained Spaces: Lessons learned from The BARN Challenge at ICRA 2022
Aug 22, 2022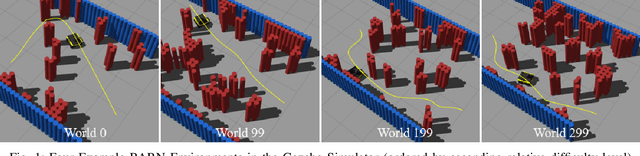
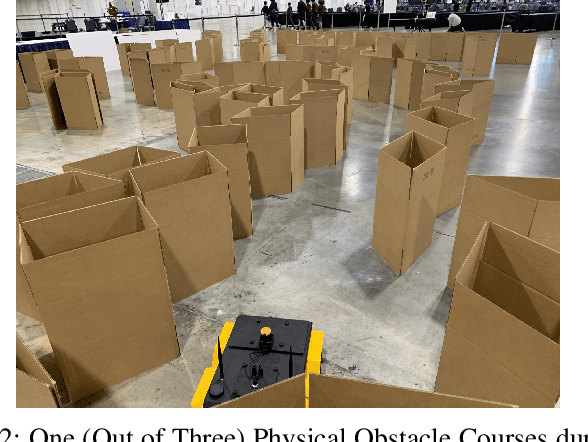
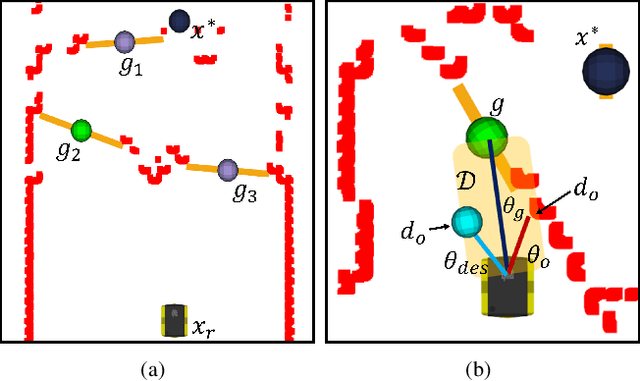
The BARN (Benchmark Autonomous Robot Navigation) Challenge took place at the 2022 IEEE International Conference on Robotics and Automation (ICRA 2022) in Philadelphia, PA. The aim of the challenge was to evaluate state-of-the-art autonomous ground navigation systems for moving robots through highly constrained environments in a safe and efficient manner. Specifically, the task was to navigate a standardized, differential-drive ground robot from a predefined start location to a goal location as quickly as possible without colliding with any obstacles, both in simulation and in the real world. Five teams from all over the world participated in the qualifying simulation competition, three of which were invited to compete with each other at a set of physical obstacle courses at the conference center in Philadelphia. The competition results suggest that autonomous ground navigation in highly constrained spaces, despite seeming ostensibly simple even for experienced roboticists, is actually far from being a solved problem. In this article, we discuss the challenge, the approaches used by the top three winning teams, and lessons learned to direct future research.
Causal Dynamics Learning for Task-Independent State Abstraction
Jun 27, 2022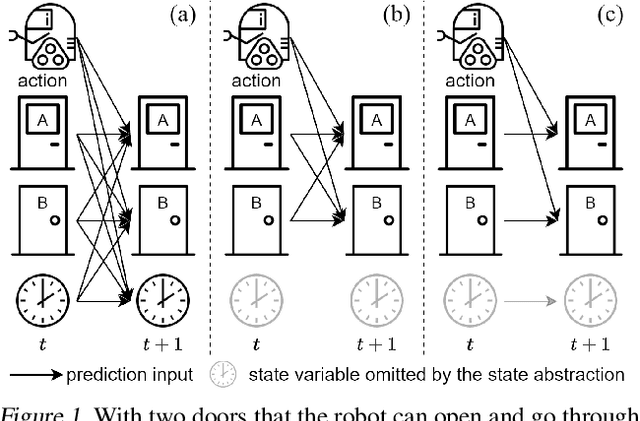
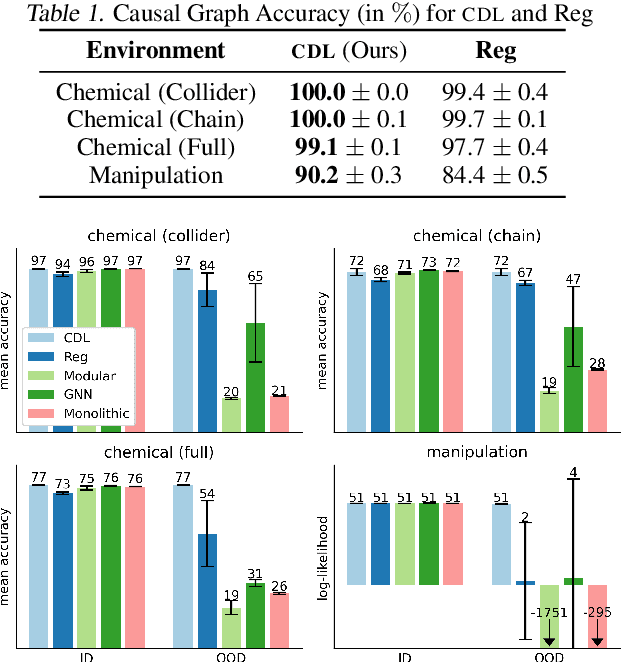
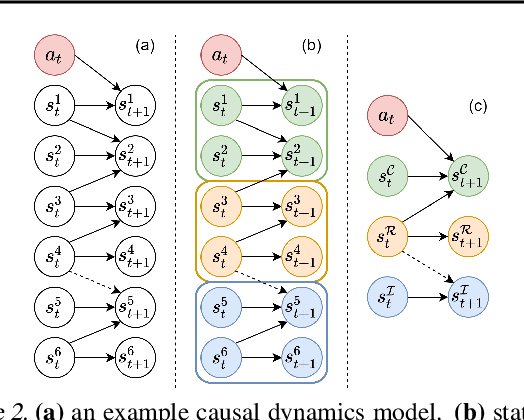
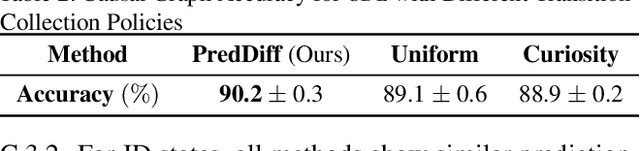
Learning dynamics models accurately is an important goal for Model-Based Reinforcement Learning (MBRL), but most MBRL methods learn a dense dynamics model which is vulnerable to spurious correlations and therefore generalizes poorly to unseen states. In this paper, we introduce Causal Dynamics Learning for Task-Independent State Abstraction (CDL), which first learns a theoretically proved causal dynamics model that removes unnecessary dependencies between state variables and the action, thus generalizing well to unseen states. A state abstraction can then be derived from the learned dynamics, which not only improves sample efficiency but also applies to a wider range of tasks than existing state abstraction methods. Evaluated on two simulated environments and downstream tasks, both the dynamics model and policies learned by the proposed method generalize well to unseen states and the derived state abstraction improves sample efficiency compared to learning without it.
APPLE: Adaptive Planner Parameter Learning from Evaluative Feedback
Aug 22, 2021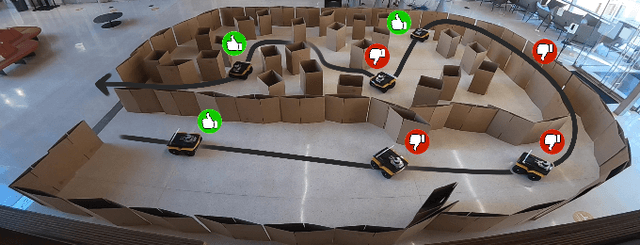
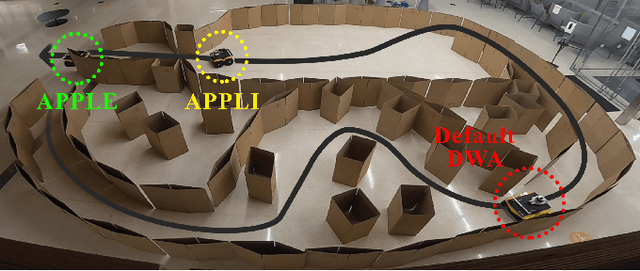
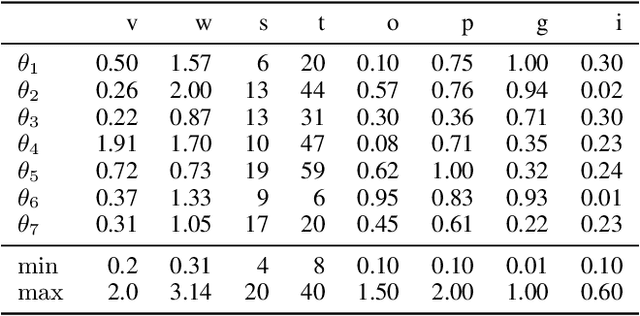
Classical autonomous navigation systems can control robots in a collision-free manner, oftentimes with verifiable safety and explainability. When facing new environments, however, fine-tuning of the system parameters by an expert is typically required before the system can navigate as expected. To alleviate this requirement, the recently-proposed Adaptive Planner Parameter Learning paradigm allows robots to \emph{learn} how to dynamically adjust planner parameters using a teleoperated demonstration or corrective interventions from non-expert users. However, these interaction modalities require users to take full control of the moving robot, which requires the users to be familiar with robot teleoperation. As an alternative, we introduce \textsc{apple}, Adaptive Planner Parameter Learning from \emph{Evaluative Feedback} (real-time, scalar-valued assessments of behavior), which represents a less-demanding modality of interaction. Simulated and physical experiments show \textsc{apple} can achieve better performance compared to the planner with static default parameters and even yield improvement over learned parameters from richer interaction modalities.