 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenOpticalFlow: A Generative Approach to Unsupervised Optical Flow Learning
Mar 23, 2026Optical flow estimation is a fundamental problem in computer vision, yet the reliance on expensive ground-truth annotations limits the scalability of supervised approaches. Although unsupervised and semi-supervised methods alleviate this issue, they often suffer from unreliable supervision signals based on brightness constancy and smoothness assumptions, leading to inaccurate motion estimation in complex real-world scenarios. To overcome these limitations, we introduce \textbf{\modelname}, a novel framework that synthesizes large-scale, perfectly aligned frame--flow data pairs for supervised optical flow training without human annotations. Specifically, our method leverages a pre-trained depth estimation network to generate pseudo optical flows, which serve as conditioning inputs for a next-frame generation model trained to produce high-fidelity, pixel-aligned subsequent frames. This process enables the creation of abundant, high-quality synthetic data with precise motion correspondence. Furthermore, we propose an \textit{inconsistent pixel filtering} strategy that identifies and removes unreliable pixels in generated frames, effectively enhancing fine-tuning performance on real-world datasets. Extensive experiments on KITTI2012, KITTI2015, and Sintel demonstrate that \textbf{\modelname} achieves competitive or superior results compared to existing unsupervised and semi-supervised approaches, highlighting its potential as a scalable and annotation-free solution for optical flow learning. We will release our code upon acceptance.
Reconstruction Matters: Learning Geometry-Aligned BEV Representation through 3D Gaussian Splatting
Mar 19, 2026Bird's-Eye-View (BEV) perception serves as a cornerstone for autonomous driving, offering a unified spatial representation that fuses surrounding-view images to enable reasoning for various downstream tasks, such as semantic segmentation, 3D object detection, and motion prediction. However, most existing BEV perception frameworks adopt an end-to-end training paradigm, where image features are directly transformed into the BEV space and optimized solely through downstream task supervision. This formulation treats the entire perception process as a black box, often lacking explicit 3D geometric understanding and interpretability, leading to suboptimal performance. In this paper, we claim that an explicit 3D representation matters for accurate BEV perception, and we propose Splat2BEV, a Gaussian Splatting-assisted framework for BEV tasks. Splat2BEV aims to learn BEV feature representations that are both semantically rich and geometrically precise. We first pre-train a Gaussian generator that explicitly reconstructs 3D scenes from multi-view inputs, enabling the generation of geometry-aligned feature representations. These representations are then projected into the BEV space to serve as inputs for downstream tasks. Extensive experiments on nuScenes and argoverse dataset demonstrate that Splat2BEV achieves state-of-the-art performance and validate the effectiveness of incorporating explicit 3D reconstruction into BEV perception.
PhysAlign: Physics-Coherent Image-to-Video Generation through Feature and 3D Representation Alignment
Mar 14, 2026Video Diffusion Models (VDMs) offer a promising approach for simulating dynamic scenes and environments, with broad applications in robotics and media generation. However, existing models often generate temporally incoherent content that violates basic physical intuition, significantly limiting their practical applicability. We propose PhysAlign, an efficient framework for physics-coherent image-to-video (I2V) generation that explicitly addresses this limitation. To overcome the critical scarcity of physics-annotated videos, we first construct a fully controllable synthetic data generation pipeline based on rigid-body simulation, yielding a highly-curated dataset with accurate, fine-grained physics and 3D annotations. Leveraging this data, PhysAlign constructs a unified physical latent space by coupling explicit 3D geometry constraints with a Gram-based spatio-temporal relational alignment that extracts kinematic priors from video foundation models. Extensive experiments demonstrate that PhysAlign significantly outperforms existing VDMs on tasks requiring complex physical reasoning and temporal stability, without compromising zero-shot visual quality. PhysAlign shows the potential to bridge the gap between raw visual synthesis and rigid-body kinematics, establishing a practical paradigm for genuinely physics-grounded video generation. The project page is available at https://physalign.github.io/PhysAlign.
UniDrive-WM: Unified Understanding, Planning and Generation World Model For Autonomous Driving
Jan 07, 2026World models have become central to autonomous driving, where accurate scene understanding and future prediction are crucial for safe control. Recent work has explored using vision-language models (VLMs) for planning, yet existing approaches typically treat perception, prediction, and planning as separate modules. We propose UniDrive-WM, a unified VLM-based world model that jointly performs driving-scene understanding, trajectory planning, and trajectory-conditioned future image generation within a single architecture. UniDrive-WM's trajectory planner predicts a future trajectory, which conditions a VLM-based image generator to produce plausible future frames. These predictions provide additional supervisory signals that enhance scene understanding and iteratively refine trajectory generation. We further compare discrete and continuous output representations for future image prediction, analyzing their influence on downstream driving performance. Experiments on the challenging Bench2Drive benchmark show that UniDrive-WM produces high-fidelity future images and improves planning performance by 5.9% in L2 trajectory error and 9.2% in collision rate over the previous best method. These results demonstrate the advantages of tightly integrating VLM-driven reasoning, planning, and generative world modeling for autonomous driving. The project page is available at https://unidrive-wm.github.io/UniDrive-WM .
DeclutterNeRF: Generative-Free 3D Scene Recovery for Occlusion Removal
Apr 07, 2025Recent novel view synthesis (NVS) techniques, including Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS) have greatly advanced 3D scene reconstruction with high-quality rendering and realistic detail recovery. Effectively removing occlusions while preserving scene details can further enhance the robustness and applicability of these techniques. However, existing approaches for object and occlusion removal predominantly rely on generative priors, which, despite filling the resulting holes, introduce new artifacts and blurriness. Moreover, existing benchmark datasets for evaluating occlusion removal methods lack realistic complexity and viewpoint variations. To address these issues, we introduce DeclutterSet, a novel dataset featuring diverse scenes with pronounced occlusions distributed across foreground, midground, and background, exhibiting substantial relative motion across viewpoints. We further introduce DeclutterNeRF, an occlusion removal method free from generative priors. DeclutterNeRF introduces joint multi-view optimization of learnable camera parameters, occlusion annealing regularization, and employs an explainable stochastic structural similarity loss, ensuring high-quality, artifact-free reconstructions from incomplete images. Experiments demonstrate that DeclutterNeRF significantly outperforms state-of-the-art methods on our proposed DeclutterSet, establishing a strong baseline for future research.
PanoDreamer: Consistent Text to 360-Degree Scene Generation
Apr 07, 2025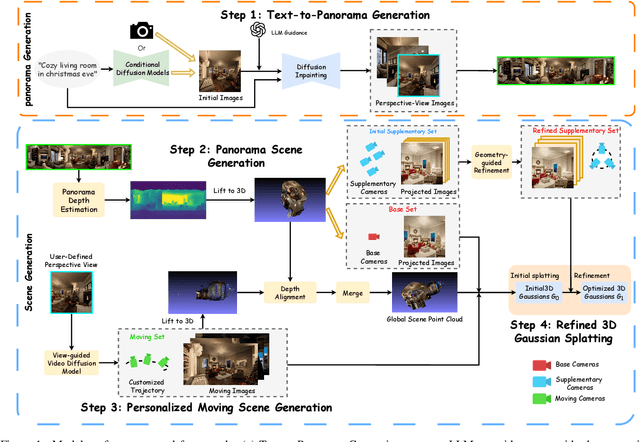

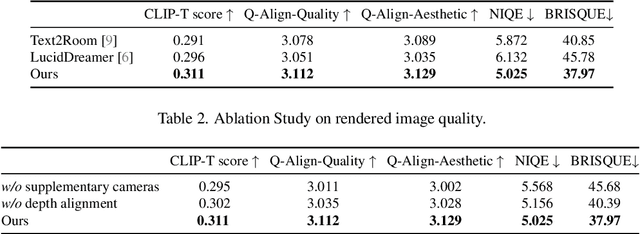
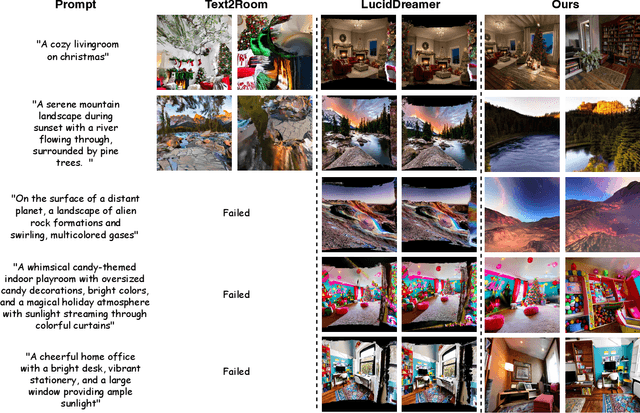
Automatically generating a complete 3D scene from a text description, a reference image, or both has significant applications in fields like virtual reality and gaming. However, current methods often generate low-quality textures and inconsistent 3D structures. This is especially true when extrapolating significantly beyond the field of view of the reference image. To address these challenges, we propose PanoDreamer, a novel framework for consistent, 3D scene generation with flexible text and image control. Our approach employs a large language model and a warp-refine pipeline, first generating an initial set of images and then compositing them into a 360-degree panorama. This panorama is then lifted into 3D to form an initial point cloud. We then use several approaches to generate additional images, from different viewpoints, that are consistent with the initial point cloud and expand/refine the initial point cloud. Given the resulting set of images, we utilize 3D Gaussian Splatting to create the final 3D scene, which can then be rendered from different viewpoints. Experiments demonstrate the effectiveness of PanoDreamer in generating high-quality, geometrically consistent 3D scenes.
GenStereo: Towards Open-World Generation of Stereo Images and Unsupervised Matching
Mar 17, 2025Stereo images are fundamental to numerous applications, including extended reality (XR) devices, autonomous driving, and robotics. Unfortunately, acquiring high-quality stereo images remains challenging due to the precise calibration requirements of dual-camera setups and the complexity of obtaining accurate, dense disparity maps. Existing stereo image generation methods typically focus on either visual quality for viewing or geometric accuracy for matching, but not both. We introduce GenStereo, a diffusion-based approach, to bridge this gap. The method includes two primary innovations (1) conditioning the diffusion process on a disparity-aware coordinate embedding and a warped input image, allowing for more precise stereo alignment than previous methods, and (2) an adaptive fusion mechanism that intelligently combines the diffusion-generated image with a warped image, improving both realism and disparity consistency. Through extensive training on 11 diverse stereo datasets, GenStereo demonstrates strong generalization ability. GenStereo achieves state-of-the-art performance in both stereo image generation and unsupervised stereo matching tasks. Our framework eliminates the need for complex hardware setups while enabling high-quality stereo image generation, making it valuable for both real-world applications and unsupervised learning scenarios. Project page is available at https://qjizhi.github.io/genstereo
GroundingBooth: Grounding Text-to-Image Customization
Sep 13, 2024Recent studies in text-to-image customization show great success in generating personalized object variants given several images of a subject. While existing methods focus more on preserving the identity of the subject, they often fall short of controlling the spatial relationship between objects. In this work, we introduce GroundingBooth, a framework that achieves zero-shot instance-level spatial grounding on both foreground subjects and background objects in the text-to-image customization task. Our proposed text-image grounding module and masked cross-attention layer allow us to generate personalized images with both accurate layout alignment and identity preservation while maintaining text-image coherence. With such layout control, our model inherently enables the customization of multiple subjects at once. Our model is evaluated on both layout-guided image synthesis and reference-based customization tasks, showing strong results compared to existing methods. Our work is the first work to achieve a joint grounding of both subject-driven foreground generation and text-driven background generation.
PSM: Learning Probabilistic Embeddings for Multi-scale Zero-Shot Soundscape Mapping
Aug 13, 2024A soundscape is defined by the acoustic environment a person perceives at a location. In this work, we propose a framework for mapping soundscapes across the Earth. Since soundscapes involve sound distributions that span varying spatial scales, we represent locations with multi-scale satellite imagery and learn a joint representation among this imagery, audio, and text. To capture the inherent uncertainty in the soundscape of a location, we design the representation space to be probabilistic. We also fuse ubiquitous metadata (including geolocation, time, and data source) to enable learning of spatially and temporally dynamic representations of soundscapes. We demonstrate the utility of our framework by creating large-scale soundscape maps integrating both audio and text with temporal control. To facilitate future research on this task, we also introduce a large-scale dataset, GeoSound, containing over $300k$ geotagged audio samples paired with both low- and high-resolution satellite imagery. We demonstrate that our method outperforms the existing state-of-the-art on both GeoSound and the existing SoundingEarth dataset. Our dataset and code is available at https://github.com/mvrl/PSM.
MCPDepth: Omnidirectional Depth Estimation via Stereo Matching from Multi-Cylindrical Panoramas
Aug 03, 2024



We introduce Multi-Cylindrical Panoramic Depth Estimation (MCPDepth), a two-stage framework for omnidirectional depth estimation via stereo matching between multiple cylindrical panoramas. MCPDepth uses cylindrical panoramas for initial stereo matching and then fuses the resulting depth maps across views. A circular attention module is employed to overcome the distortion along the vertical axis. MCPDepth exclusively utilizes standard network components, simplifying deployment to embedded devices and outperforming previous methods that require custom kernels. We theoretically and experimentally compare spherical and cylindrical projections for stereo matching, highlighting the advantages of the cylindrical projection. MCPDepth achieves state-of-the-art performance with an 18.8% reduction in mean absolute error (MAE) for depth on the outdoor synthetic dataset Deep360 and a 19.9% reduction on the indoor real-scene dataset 3D60.