 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePuYun: Medium-Range Global Weather Forecasting Using Large Kernel Attention Convolutional Networks
Sep 01, 2024



Accurate weather forecasting is essential for understanding and mitigating weather-related impacts. In this paper, we present PuYun, an autoregressive cascade model that leverages large kernel attention convolutional networks. The model's design inherently supports extended weather prediction horizons while broadening the effective receptive field. The integration of large kernel attention mechanisms within the convolutional layers enhances the model's capacity to capture fine-grained spatial details, thereby improving its predictive accuracy for meteorological phenomena. We introduce PuYun, comprising PuYun-Short for 0-5 day forecasts and PuYun-Medium for 5-10 day predictions. This approach enhances the accuracy of 10-day weather forecasting. Through evaluation, we demonstrate that PuYun-Short alone surpasses the performance of both GraphCast and FuXi-Short in generating accurate 10-day forecasts. Specifically, on the 10th day, PuYun-Short reduces the RMSE for Z500 to 720 $m^2/s^2$, compared to 732 $m^2/s^2$ for GraphCast and 740 $m^2/s^2$ for FuXi-Short. Additionally, the RMSE for T2M is reduced to 2.60 K, compared to 2.63 K for GraphCast and 2.65 K for FuXi-Short. Furthermore, when employing a cascaded approach by integrating PuYun-Short and PuYun-Medium, our method achieves superior results compared to the combined performance of FuXi-Short and FuXi-Medium. On the 10th day, the RMSE for Z500 is further reduced to 638 $m^2/s^2$, compared to 641 $m^2/s^2$ for FuXi. These findings underscore the effectiveness of our model ensemble in advancing medium-range weather prediction. Our training code and model will be open-sourced.
Resource Allocation in the RIS Assisted SCMA Cellular Network Coexisting with D2D Communications
Apr 19, 2023



The cellular network coexisting with device-to-device (D2D) communications has been studied extensively. Reconfigurable intelligent surface (RIS) and non-orthogonal multiple access (NOMA) are promising technologies for the evolution of 5G, 6G and beyond. Besides, sparse code multiple access (SCMA) is considered suitable for next-generation wireless network in code-domain NOMA. In this paper, we consider the RIS-aided uplink SCMA cellular network simultaneously with D2D users. We formulate the optimization problem which aims to maximize the cellular sum-rate by jointly designing D2D users resource block (RB) association, the transmitted power for both cellular users and D2D users, and the phase shifts at the RIS. The power limitation and users communication requirements are considered. The problem is non-convex, and it is challenging to solve it directly. To handle this optimization problem, we propose an efficient iterative algorithm based on block coordinate descent (BCD) method. The original problem is decoupled into three subproblems to solve separately. Simulation results demonstrate that the proposed scheme can significantly improve the sum-rate performance over various schemes.
Capacity Analysis and Sum Rate Maximization for the SCMA Cellular Network Coexisting with D2D Communications
Sep 21, 2022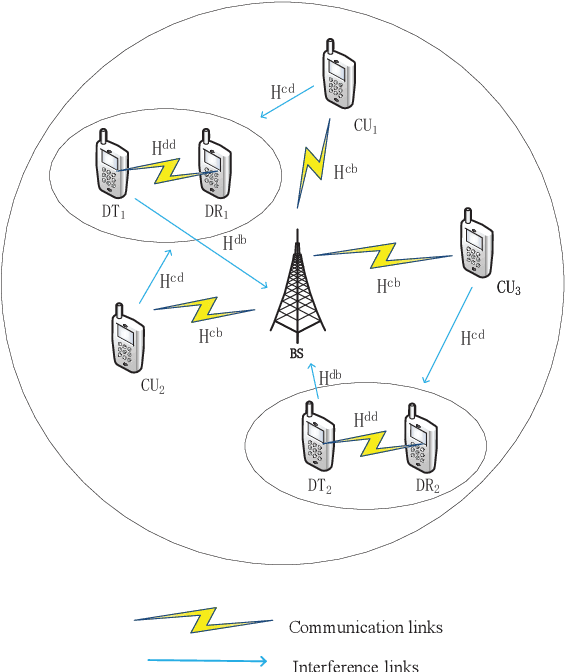
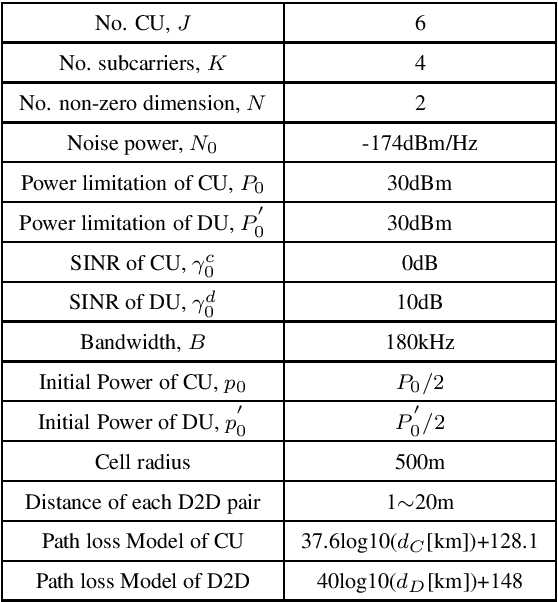
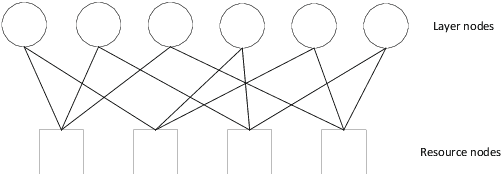
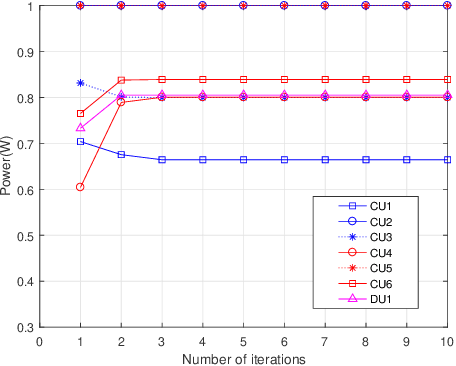
Sparse code multiple access (SCMA) is the most concerning scheme among non-orthogonal multiple access (NOMA) technologies for 5G wireless communication new interface. Another efficient technique in 5G aimed to improve spectral efficiency for local communications is device-to-device (D2D) communications. Therefore, we utilize the SCMA cellular network coexisting with D2D communications for the connection demand of the Internet of things (IOT), and improve the system sum rate performance of the hybrid network. We first derive the information-theoretic expression of the capacity for all users and find the capacity bound of cellular users based on the mutual interference between cellular users and D2D users. Then we consider the power optimization problem for the cellular users and D2D users jointly to maximize the system sum rate. To tackle the non-convex optimization problem, we propose a geometric programming (GP) based iterative power allocation algorithm. Simulation results demonstrate that the proposed algorithm converges fast and well improves the sum rate performance.
STINet: Spatio-Temporal-Interactive Network for Pedestrian Detection and Trajectory Prediction
May 08, 2020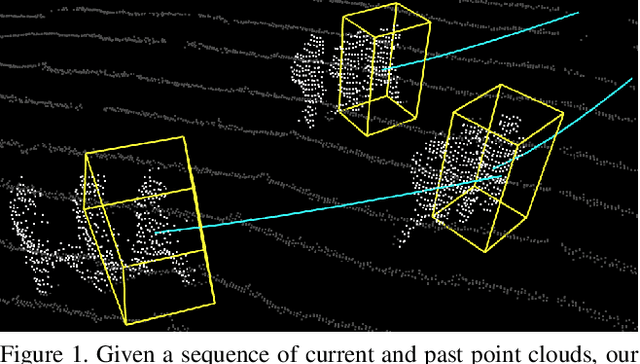

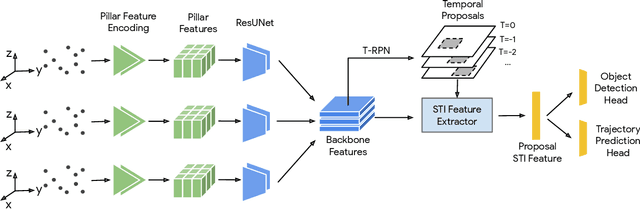
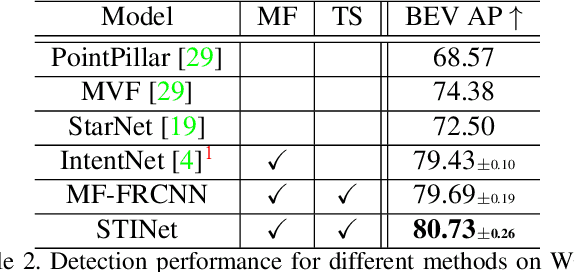
Detecting pedestrians and predicting future trajectories for them are critical tasks for numerous applications, such as autonomous driving. Previous methods either treat the detection and prediction as separate tasks or simply add a trajectory regression head on top of a detector. In this work, we present a novel end-to-end two-stage network: Spatio-Temporal-Interactive Network (STINet). In addition to 3D geometry modeling of pedestrians, we model the temporal information for each of the pedestrians. To do so, our method predicts both current and past locations in the first stage, so that each pedestrian can be linked across frames and the comprehensive spatio-temporal information can be captured in the second stage. Also, we model the interaction among objects with an interaction graph, to gather the information among the neighboring objects. Comprehensive experiments on the Lyft Dataset and the recently released large-scale Waymo Open Dataset for both object detection and future trajectory prediction validate the effectiveness of the proposed method. For the Waymo Open Dataset, we achieve a bird-eyes-view (BEV) detection AP of 80.73 and trajectory prediction average displacement error (ADE) of 33.67cm for pedestrians, which establish the state-of-the-art for both tasks.
NAOMI: Non-Autoregressive Multiresolution Sequence Imputation
Jan 30, 2019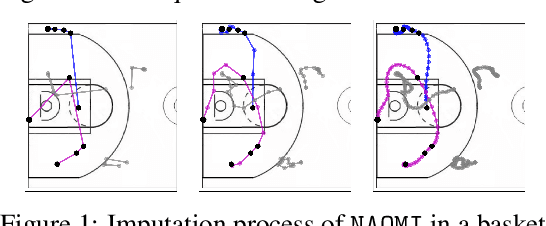

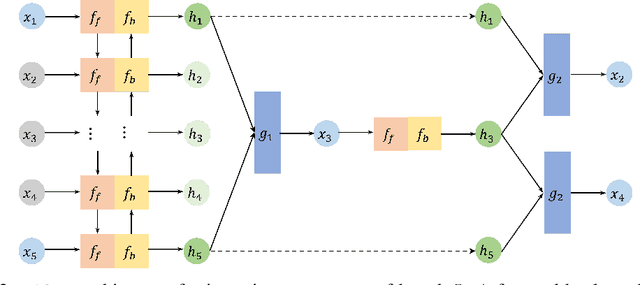

Missing value imputation is a fundamental problem in modeling spatiotemporal sequences, from motion tracking to the dynamics of physical systems. In this paper, we take a non-autoregressive approach and propose a novel deep generative model: Non-AutOregressive Multiresolution Imputation (NAOMI) for imputing long-range spatiotemporal sequences given arbitrary missing patterns. In particular, NAOMI exploits the multiresolution structure of spatiotemporal data to interpolate recursively from coarse to fine-grained resolutions. We further enhance our model with adversarial training using an imitation learning objective. When trained on billiards and basketball trajectories, NAOMI demonstrates significant improvement in imputation accuracy (reducing average prediction error by 60% compared to autoregressive counterparts) and generalization capability for long range trajectories in systems of both deterministic and stochastic dynamics.