 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconstructing Randomly Masked Spectra Helps DNNs Identify Discriminant Wavenumbers
Jun 19, 2026Nondestructive detection methods, based on vibrational spectroscopy, are vitally important in a wide range of applications including industrial chemistry, pharmacy and national defense. Recently, deep learning has been introduced into vibrational spectroscopy showing great potential. Different from images, text, etc. that offer large labeled data sets, vibrational spectroscopic data is very limited, which requires novel concepts beyond transfer and meta learning. To tackle this, we propose a task-enhanced augmentation network (TeaNet). The key component of TeaNet is a reconstruction module that inputs randomly masked spectra and outputs reconstructed samples that are similar to the original ones, but include additional variations learned from the domain. These augmented samples are used to train the classification model. The reconstruction and prediction parts are trained simultaneously, end-to-end with back-propagation. Results on both synthetic and real-world datasets verified the superiority of the proposed method. In the most difficult synthetic scenarios TeaNet outperformed CNN by 17%. We visualized and analysed the neuron responses of TeaNet and CNN, and found that TeaNet's ability to identify discriminant wavenumbers was excellent compared to CNN. Our approach is general and can be easily adapted to other domains, offering a solution to more accurate and interpretable few-shot learning.
A General One-Shot Multimodal Active Perception Framework for Robotic Manipulation: Learning to Predict Optimal Viewpoint
Jan 20, 2026Active perception in vision-based robotic manipulation aims to move the camera toward more informative observation viewpoints, thereby providing high-quality perceptual inputs for downstream tasks. Most existing active perception methods rely on iterative optimization, leading to high time and motion costs, and are tightly coupled with task-specific objectives, which limits their transferability. In this paper, we propose a general one-shot multimodal active perception framework for robotic manipulation. The framework enables direct inference of optimal viewpoints and comprises a data collection pipeline and an optimal viewpoint prediction network. Specifically, the framework decouples viewpoint quality evaluation from the overall architecture, supporting heterogeneous task requirements. Optimal viewpoints are defined through systematic sampling and evaluation of candidate viewpoints, after which large-scale training datasets are constructed via domain randomization. Moreover, a multimodal optimal viewpoint prediction network is developed, leveraging cross-attention to align and fuse multimodal features and directly predict camera pose adjustments. The proposed framework is instantiated in robotic grasping under viewpoint-constrained environments. Experimental results demonstrate that active perception guided by the framework significantly improves grasp success rates. Notably, real-world evaluations achieve nearly double the grasp success rate and enable seamless sim-to-real transfer without additional fine-tuning, demonstrating the effectiveness of the proposed framework.
Learning Omnidirectional Locomotion for a Salamander-Like Quadruped Robot
Nov 11, 2025Salamander-like quadruped robots are designed inspired by the skeletal structure of their biological counterparts. However, existing controllers cannot fully exploit these morphological features and largely rely on predefined gait patterns or joint trajectories, which prevents the generation of diverse and flexible locomotion and limits their applicability in real-world scenarios. In this paper, we propose a learning framework that enables the robot to acquire a diverse repertoire of omnidirectional gaits without reference motions. Each body part is controlled by a phase variable capable of forward and backward evolution, with a phase coverage reward to promote the exploration of the leg phase space. Additionally, morphological symmetry of the robot is incorporated via data augmentation, improving sample efficiency and enforcing both motion-level and task-level symmetry in learned behaviors. Extensive experiments show that the robot successfully acquires 22 omnidirectional gaits exhibiting both dynamic and symmetric movements, demonstrating the effectiveness of the proposed learning framework.
FastGS: Training 3D Gaussian Splatting in 100 Seconds
Nov 06, 2025The dominant 3D Gaussian splatting (3DGS) acceleration methods fail to properly regulate the number of Gaussians during training, causing redundant computational time overhead. In this paper, we propose FastGS, a novel, simple, and general acceleration framework that fully considers the importance of each Gaussian based on multi-view consistency, efficiently solving the trade-off between training time and rendering quality. We innovatively design a densification and pruning strategy based on multi-view consistency, dispensing with the budgeting mechanism. Extensive experiments on Mip-NeRF 360, Tanks & Temples, and Deep Blending datasets demonstrate that our method significantly outperforms the state-of-the-art methods in training speed, achieving a 3.32$\times$ training acceleration and comparable rendering quality compared with DashGaussian on the Mip-NeRF 360 dataset and a 15.45$\times$ acceleration compared with vanilla 3DGS on the Deep Blending dataset. We demonstrate that FastGS exhibits strong generality, delivering 2-7$\times$ training acceleration across various tasks, including dynamic scene reconstruction, surface reconstruction, sparse-view reconstruction, large-scale reconstruction, and simultaneous localization and mapping. The project page is available at https://fastgs.github.io/
RINGO: Real-time Navigation with a Guiding Trajectory for Aerial Manipulators in Unknown Environments
Apr 14, 2025Motion planning for aerial manipulators in constrained environments has typically been limited to known environments or simplified to that of multi-rotors, which leads to poor adaptability and overly conservative trajectories. This paper presents RINGO: Real-time Navigation with a Guiding Trajectory, a novel planning framework that enables aerial manipulators to navigate unknown environments in real time. The proposed method simultaneously considers the positions of both the multi-rotor and the end-effector. A pre-obtained multi-rotor trajectory serves as a guiding reference, allowing the end-effector to generate a smooth, collision-free, and workspace-compatible trajectory. Leveraging the convex hull property of B-spline curves, we theoretically guarantee that the trajectory remains within the reachable workspace. To the best of our knowledge, this is the first work that enables real-time navigation of aerial manipulators in unknown environments. The simulation and experimental results show the effectiveness of the proposed method. The proposed method generates less conservative trajectories than approaches that consider only the multi-rotor.
Adaptive RISE Control for Dual-Arm Unmanned Aerial Manipulator Systems with Deep Neural Networks
Apr 08, 2025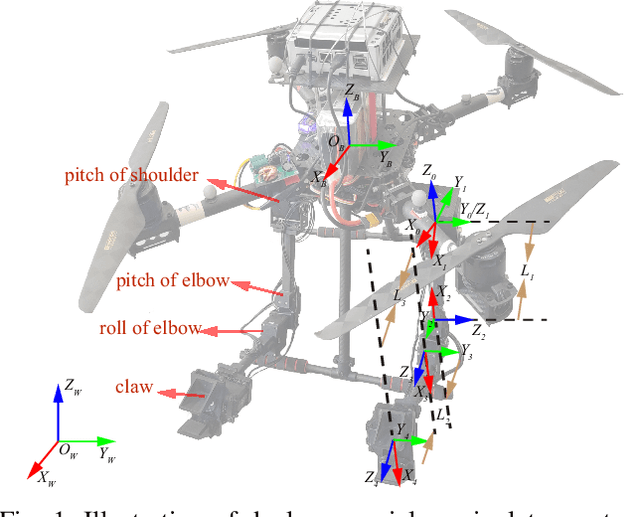
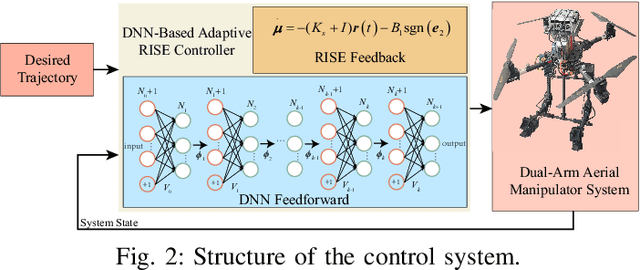
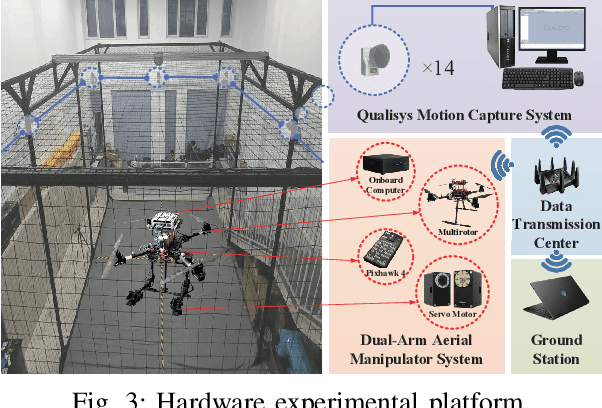
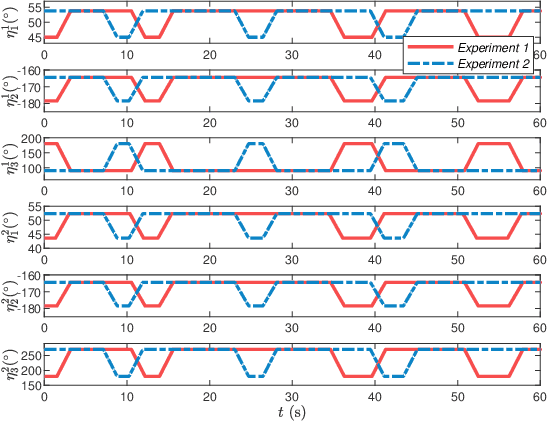
The unmanned aerial manipulator system, consisting of a multirotor UAV (unmanned aerial vehicle) and a manipulator, has attracted considerable interest from researchers. Nevertheless, the operation of a dual-arm manipulator poses a dynamic challenge, as the CoM (center of mass) of the system changes with manipulator movement, potentially impacting the multirotor UAV. Additionally, unmodeled effects, parameter uncertainties, and external disturbances can significantly degrade control performance, leading to unforeseen dangers. To tackle these issues, this paper proposes a nonlinear adaptive RISE (robust integral of the sign of the error) controller based on DNN (deep neural network). The first step involves establishing the kinematic and dynamic model of the dual-arm aerial manipulator. Subsequently, the adaptive RISE controller is proposed with a DNN feedforward term to effectively address both internal and external challenges. By employing Lyapunov techniques, the asymptotic convergence of the tracking error signals are guaranteed rigorously. Notably, this paper marks a pioneering effort by presenting the first DNN-based adaptive RISE controller design accompanied by a comprehensive stability analysis. To validate the practicality and robustness of the proposed control approach, several groups of actual hardware experiments are conducted. The results confirm the efficacy of the developed methodology in handling real-world scenarios, thereby offering valuable insights into the performance of the dual-arm aerial manipulator system.
Robust Safety Critical Control Under Multiple State and Input Constraints: Volume Control Barrier Function Method
Mar 20, 2025In this paper, the safety-critical control problem for uncertain systems under multiple control barrier function (CBF) constraints and input constraints is investigated. A novel framework is proposed to generate a safety filter that minimizes changes to reference inputs when safety risks arise, ensuring a balance between safety and performance. A nonlinear disturbance observer (DOB) based on the robust integral of the sign of the error (RISE) is used to estimate system uncertainties, ensuring that the estimation error converges to zero exponentially. This error bound is integrated into the safety-critical controller to reduce conservativeness while ensuring safety. To further address the challenges arising from multiple CBF and input constraints, a novel Volume CBF (VCBF) is proposed by analyzing the feasible space of the quadratic programming (QP) problem. % ensuring solution feasibility by keeping the volume as a positive value. To ensure that the feasible space does not vanish under disturbances, a DOB-VCBF-based method is introduced, ensuring system safety while maintaining the feasibility of the resulting QP. Subsequently, several groups of simulation and experimental results are provided to validate the effectiveness of the proposed controller.
Polytope Volume Monitoring Problem: Formulation and Solution via Parametric Linear Program Based Control Barrier Function
Mar 16, 2025Motivated by the latest research on feasible space monitoring of multiple control barrier functions (CBFs) as well as polytopic collision avoidance, this paper studies the Polytope Volume Monitoring (PVM) problem, whose goal is to design a control law for inputs of nonlinear systems to prevent the volume of some state-dependent polytope from decreasing to zero. Recent studies have explored the idea of applying Chebyshev ball method in optimization theory to solve the case study of PVM; however, the underlying difficulties caused by nonsmoothness have not been addressed. This paper continues the study on this topic, where our main contribution is to establish the relationship between nonsmooth CBF and parametric optimization theory through directional derivatives for the first time, so as to solve PVM problems more conveniently. In detail, inspired by Chebyshev ball approach, a parametric linear program (PLP) based nonsmooth barrier function candidate is established for PVM, and then, sufficient conditions for it to be a nonsmooth CBF are proposed, based on which a quadratic program (QP) based safety filter with guaranteed feasibility is proposed to address PVM problems. Finally, a numerical simulation example is given to show the efficiency of the proposed safety filter.
Optimization-free Smooth Control Barrier Function for Polygonal Collision Avoidance
Feb 22, 2025Polygonal collision avoidance (PCA) is short for the problem of collision avoidance between two polygons (i.e., polytopes in planar) that own their dynamic equations. This problem suffers the inherent difficulty in dealing with non-smooth boundaries and recently optimization-defined metrics, such as signed distance field (SDF) and its variants, have been proposed as control barrier functions (CBFs) to tackle PCA problems. In contrast, we propose an optimization-free smooth CBF method in this paper, which is computationally efficient and proved to be nonconservative. It is achieved by three main steps: a lower bound of SDF is expressed as a nested Boolean logic composition first, then its smooth approximation is established by applying the latest log-sum-exp method, after which a specified CBF-based safety filter is proposed to address this class of problems. To illustrate its wide applications, the optimization-free smooth CBF method is extended to solve distributed collision avoidance of two underactuated nonholonomic vehicles and drive an underactuated container crane to avoid a moving obstacle respectively, for which numerical simulations are also performed.
Reflection of Episodes: Learning to Play Game from Expert and Self Experiences
Feb 19, 2025



StarCraft II is a complex and dynamic real-time strategy (RTS) game environment, which is very suitable for artificial intelligence and reinforcement learning research. To address the problem of Large Language Model(LLM) learning in complex environments through self-reflection, we propose a Reflection of Episodes(ROE) framework based on expert experience and self-experience. This framework first obtains key information in the game through a keyframe selection method, then makes decisions based on expert experience and self-experience. After a game is completed, it reflects on the previous experience to obtain new self-experience. Finally, in the experiment, our method beat the robot under the Very Hard difficulty in TextStarCraft II. We analyze the data of the LLM in the process of the game in detail, verified its effectiveness.