 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAmoebaLLM: Constructing Any-Shape Large Language Models for Efficient and Instant Deployment
Nov 15, 2024Motivated by the transformative capabilities of large language models (LLMs) across various natural language tasks, there has been a growing demand to deploy these models effectively across diverse real-world applications and platforms. However, the challenge of efficiently deploying LLMs has become increasingly pronounced due to the varying application-specific performance requirements and the rapid evolution of computational platforms, which feature diverse resource constraints and deployment flows. These varying requirements necessitate LLMs that can adapt their structures (depth and width) for optimal efficiency across different platforms and application specifications. To address this critical gap, we propose AmoebaLLM, a novel framework designed to enable the instant derivation of LLM subnets of arbitrary shapes, which achieve the accuracy-efficiency frontier and can be extracted immediately after a one-time fine-tuning. In this way, AmoebaLLM significantly facilitates rapid deployment tailored to various platforms and applications. Specifically, AmoebaLLM integrates three innovative components: (1) a knowledge-preserving subnet selection strategy that features a dynamic-programming approach for depth shrinking and an importance-driven method for width shrinking; (2) a shape-aware mixture of LoRAs to mitigate gradient conflicts among subnets during fine-tuning; and (3) an in-place distillation scheme with loss-magnitude balancing as the fine-tuning objective. Extensive experiments validate that AmoebaLLM not only sets new standards in LLM adaptability but also successfully delivers subnets that achieve state-of-the-art trade-offs between accuracy and efficiency.
MG-Verilog: Multi-grained Dataset Towards Enhanced LLM-assisted Verilog Generation
Jul 02, 2024



Large Language Models (LLMs) have recently shown promise in streamlining hardware design processes by encapsulating vast amounts of domain-specific data. In addition, they allow users to interact with the design processes through natural language instructions, thus making hardware design more accessible to developers. However, effectively leveraging LLMs in hardware design necessitates providing domain-specific data during inference (e.g., through in-context learning), fine-tuning, or pre-training. Unfortunately, existing publicly available hardware datasets are often limited in size, complexity, or detail, which hinders the effectiveness of LLMs in hardware design tasks. To address this issue, we first propose a set of criteria for creating high-quality hardware datasets that can effectively enhance LLM-assisted hardware design. Based on these criteria, we propose a Multi-Grained-Verilog (MG-Verilog) dataset, which encompasses descriptions at various levels of detail and corresponding code samples. To benefit the broader hardware design community, we have developed an open-source infrastructure that facilitates easy access, integration, and extension of the dataset to meet specific project needs. Furthermore, to fully exploit the potential of the MG-Verilog dataset, which varies in complexity and detail, we introduce a balanced fine-tuning scheme. This scheme serves as a unique use case to leverage the diverse levels of detail provided by the dataset. Extensive experiments demonstrate that the proposed dataset and fine-tuning scheme consistently improve the performance of LLMs in hardware design tasks.
A Noise-robust Multi-head Attention Mechanism for Formation Resistivity Prediction: Frequency Aware LSTM
Jun 06, 2024



The prediction of formation resistivity plays a crucial role in the evaluation of oil and gas reservoirs, identification and assessment of geothermal energy resources, groundwater detection and monitoring, and carbon capture and storage. However, traditional well logging techniques fail to measure accurate resistivity in cased boreholes, and the transient electromagnetic method for cased borehole resistivity logging encounters challenges of high-frequency disaster (the problem of inadequate learning by neural networks in high-frequency features) and noise interference, badly affecting accuracy. To address these challenges, frequency-aware framework and temporal anti-noise block are proposed to build frequency aware LSTM (FAL). The frequency-aware framework implements a dual-stream structure through wavelet transformation, allowing the neural network to simultaneously handle high-frequency and low-frequency flows of time-series data, thus avoiding high-frequency disaster. The temporal anti-noise block integrates multiple attention mechanisms and soft-threshold attention mechanisms, enabling the model to better distinguish noise from redundant features. Ablation experiments demonstrate that the frequency-aware framework and temporal anti-noise block contribute significantly to performance improvement. FAL achieves a 24.3% improvement in R2 over LSTM, reaching the highest value of 0.91 among all models. In robustness experiments, the impact of noise on FAL is approximately 1/8 of the baseline, confirming the noise resistance of FAL. The proposed FAL effectively reduces noise interference in predicting formation resistivity from cased transient electromagnetic well logging curves, better learns high-frequency features, and thereby enhances the prediction accuracy and noise resistance of the neural network model.
GPT4AIGChip: Towards Next-Generation AI Accelerator Design Automation via Large Language Models
Sep 19, 2023



The remarkable capabilities and intricate nature of Artificial Intelligence (AI) have dramatically escalated the imperative for specialized AI accelerators. Nonetheless, designing these accelerators for various AI workloads remains both labor- and time-intensive. While existing design exploration and automation tools can partially alleviate the need for extensive human involvement, they still demand substantial hardware expertise, posing a barrier to non-experts and stifling AI accelerator development. Motivated by the astonishing potential of large language models (LLMs) for generating high-quality content in response to human language instructions, we embark on this work to examine the possibility of harnessing LLMs to automate AI accelerator design. Through this endeavor, we develop GPT4AIGChip, a framework intended to democratize AI accelerator design by leveraging human natural languages instead of domain-specific languages. Specifically, we first perform an in-depth investigation into LLMs' limitations and capabilities for AI accelerator design, thus aiding our understanding of our current position and garnering insights into LLM-powered automated AI accelerator design. Furthermore, drawing inspiration from the above insights, we develop a framework called GPT4AIGChip, which features an automated demo-augmented prompt-generation pipeline utilizing in-context learning to guide LLMs towards creating high-quality AI accelerator design. To our knowledge, this work is the first to demonstrate an effective pipeline for LLM-powered automated AI accelerator generation. Accordingly, we anticipate that our insights and framework can serve as a catalyst for innovations in next-generation LLM-powered design automation tools.
ViTCoD: Vision Transformer Acceleration via Dedicated Algorithm and Accelerator Co-Design
Oct 18, 2022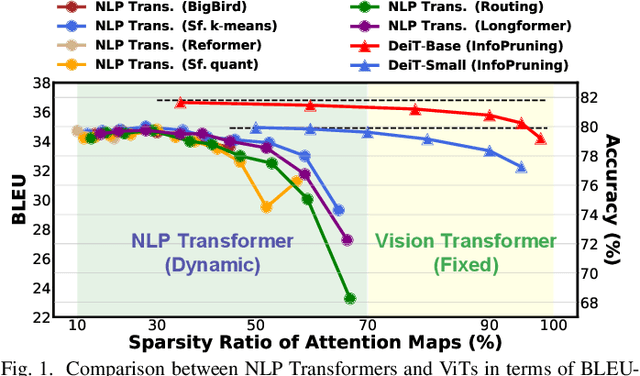
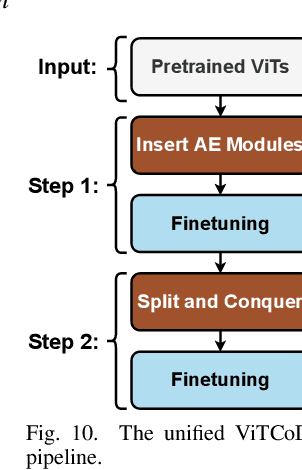
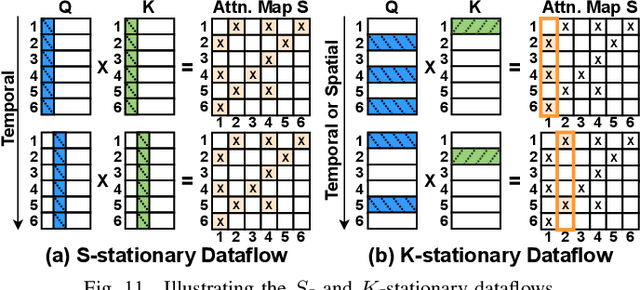
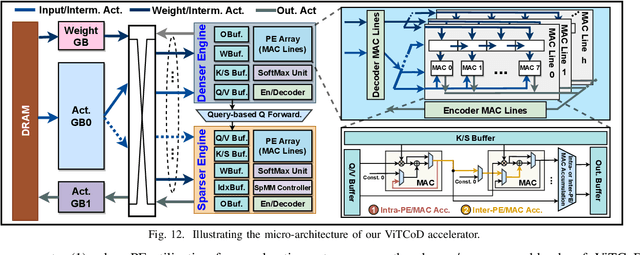
Vision Transformers (ViTs) have achieved state-of-the-art performance on various vision tasks. However, ViTs' self-attention module is still arguably a major bottleneck, limiting their achievable hardware efficiency. Meanwhile, existing accelerators dedicated to NLP Transformers are not optimal for ViTs. This is because there is a large difference between ViTs and NLP Transformers: ViTs have a relatively fixed number of input tokens, whose attention maps can be pruned by up to 90% even with fixed sparse patterns; while NLP Transformers need to handle input sequences of varying numbers of tokens and rely on on-the-fly predictions of dynamic sparse attention patterns for each input to achieve a decent sparsity (e.g., >=50%). To this end, we propose a dedicated algorithm and accelerator co-design framework dubbed ViTCoD for accelerating ViTs. Specifically, on the algorithm level, ViTCoD prunes and polarizes the attention maps to have either denser or sparser fixed patterns for regularizing two levels of workloads without hurting the accuracy, largely reducing the attention computations while leaving room for alleviating the remaining dominant data movements; on top of that, we further integrate a lightweight and learnable auto-encoder module to enable trading the dominant high-cost data movements for lower-cost computations. On the hardware level, we develop a dedicated accelerator to simultaneously coordinate the enforced denser/sparser workloads and encoder/decoder engines for boosted hardware utilization. Extensive experiments and ablation studies validate that ViTCoD largely reduces the dominant data movement costs, achieving speedups of up to 235.3x, 142.9x, 86.0x, 10.1x, and 6.8x over general computing platforms CPUs, EdgeGPUs, GPUs, and prior-art Transformer accelerators SpAtten and Sanger under an attention sparsity of 90%, respectively.
I-GCN: A Graph Convolutional Network Accelerator with Runtime Locality Enhancement through Islandization
Mar 07, 2022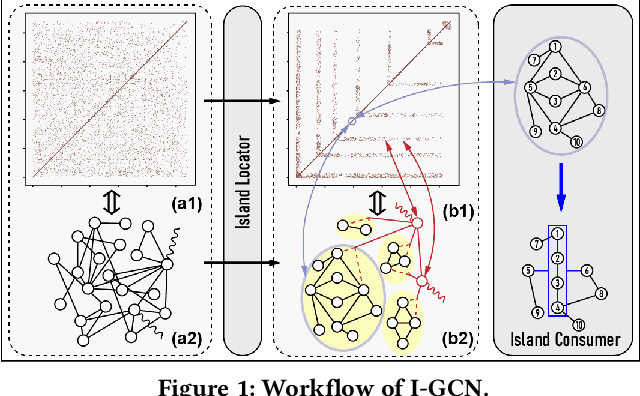
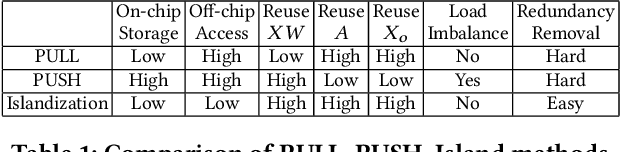
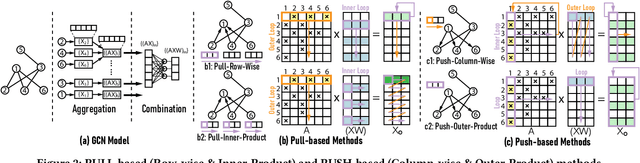

Graph Convolutional Networks (GCNs) have drawn tremendous attention in the past three years. Compared with other deep learning modalities, high-performance hardware acceleration of GCNs is as critical but even more challenging. The hurdles arise from the poor data locality and redundant computation due to the large size, high sparsity, and irregular non-zero distribution of real-world graphs. In this paper we propose a novel hardware accelerator for GCN inference, called I-GCN, that significantly improves data locality and reduces unnecessary computation. The mechanism is a new online graph restructuring algorithm we refer to as islandization. The proposed algorithm finds clusters of nodes with strong internal but weak external connections. The islandization process yields two major benefits. First, by processing islands rather than individual nodes, there is better on-chip data reuse and fewer off-chip memory accesses. Second, there is less redundant computation as aggregation for common/shared neighbors in an island can be reused. The parallel search, identification, and leverage of graph islands are all handled purely in hardware at runtime working in an incremental pipeline. This is done without any preprocessing of the graph data or adjustment of the GCN model structure. Experimental results show that I-GCN can significantly reduce off-chip accesses and prune 38% of aggregation operations, leading to performance speedups over CPUs, GPUs, the prior art GCN accelerators of 5549x, 403x, and 5.7x on average, respectively.
GCoD: Graph Convolutional Network Acceleration via Dedicated Algorithm and Accelerator Co-Design
Dec 22, 2021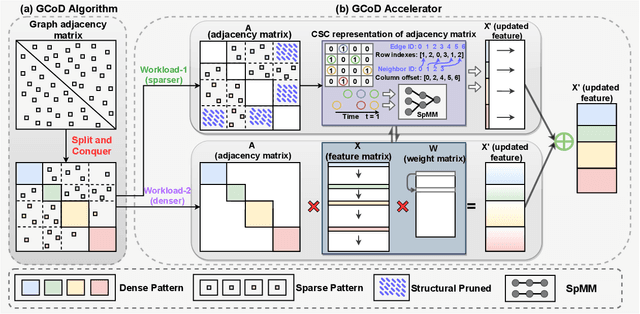
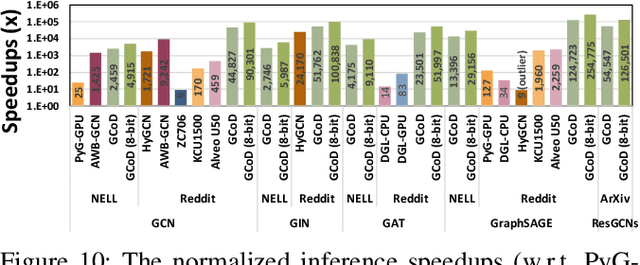

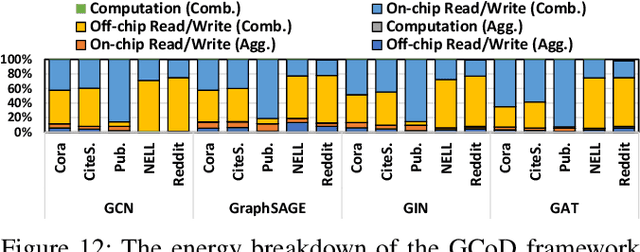
Graph Convolutional Networks (GCNs) have emerged as the state-of-the-art graph learning model. However, it can be notoriously challenging to inference GCNs over large graph datasets, limiting their application to large real-world graphs and hindering the exploration of deeper and more sophisticated GCN graphs. This is because real-world graphs can be extremely large and sparse. Furthermore, the node degree of GCNs tends to follow the power-law distribution and therefore have highly irregular adjacency matrices, resulting in prohibitive inefficiencies in both data processing and movement and thus substantially limiting the achievable GCN acceleration efficiency. To this end, this paper proposes a GCN algorithm and accelerator Co-Design framework dubbed GCoD which can largely alleviate the aforementioned GCN irregularity and boost GCNs' inference efficiency. Specifically, on the algorithm level, GCoD integrates a split and conquer GCN training strategy that polarizes the graphs to be either denser or sparser in local neighborhoods without compromising the model accuracy, resulting in graph adjacency matrices that (mostly) have merely two levels of workload and enjoys largely enhanced regularity and thus ease of acceleration. On the hardware level, we further develop a dedicated two-pronged accelerator with a separated engine to process each of the aforementioned denser and sparser workloads, further boosting the overall utilization and acceleration efficiency. Extensive experiments and ablation studies validate that our GCoD consistently reduces the number of off-chip accesses, leading to speedups of 15286x, 294x, 7.8x, and 2.5x as compared to CPUs, GPUs, and prior-art GCN accelerators including HyGCN and AWB-GCN, respectively, while maintaining or even improving the task accuracy.
RT-RCG: Neural Network and Accelerator Search Towards Effective and Real-time ECG Reconstruction from Intracardiac Electrograms
Nov 04, 2021

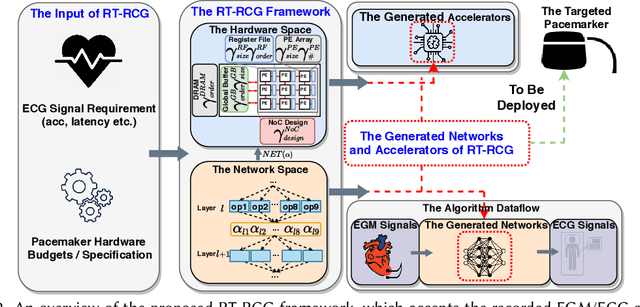
There exists a gap in terms of the signals provided by pacemakers (i.e., intracardiac electrogram (EGM)) and the signals doctors use (i.e., 12-lead electrocardiogram (ECG)) to diagnose abnormal rhythms. Therefore, the former, even if remotely transmitted, are not sufficient for doctors to provide a precise diagnosis, let alone make a timely intervention. To close this gap and make a heuristic step towards real-time critical intervention in instant response to irregular and infrequent ventricular rhythms, we propose a new framework dubbed RT-RCG to automatically search for (1) efficient Deep Neural Network (DNN) structures and then (2)corresponding accelerators, to enable Real-Time and high-quality Reconstruction of ECG signals from EGM signals. Specifically, RT-RCG proposes a new DNN search space tailored for ECG reconstruction from EGM signals, and incorporates a differentiable acceleration search (DAS) engine to efficiently navigate over the large and discrete accelerator design space to generate optimized accelerators. Extensive experiments and ablation studies under various settings consistently validate the effectiveness of our RT-RCG. To the best of our knowledge, RT-RCG is the first to leverage neural architecture search (NAS) to simultaneously tackle both reconstruction efficacy and efficiency.
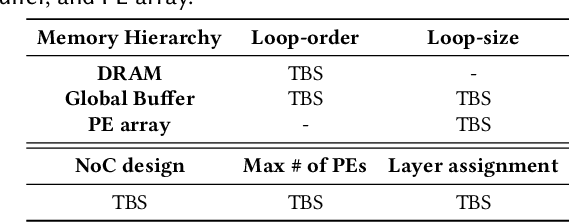
G-CoS: GNN-Accelerator Co-Search Towards Both Better Accuracy and Efficiency
Sep 18, 2021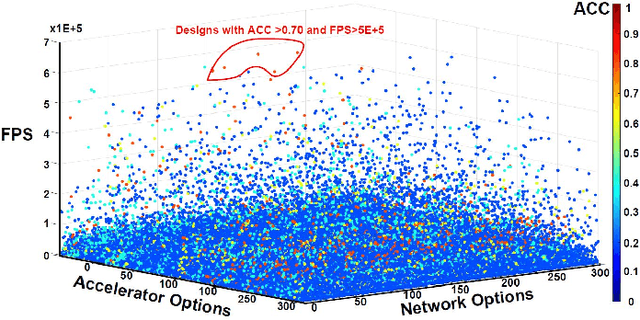
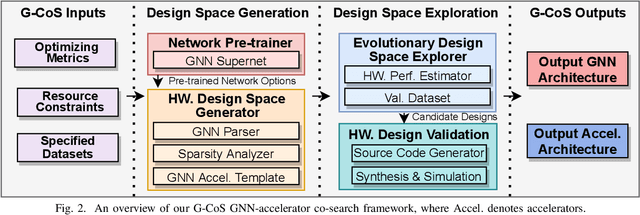
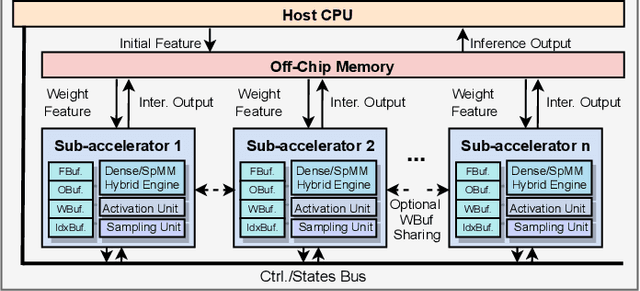
Graph Neural Networks (GNNs) have emerged as the state-of-the-art (SOTA) method for graph-based learning tasks. However, it still remains prohibitively challenging to inference GNNs over large graph datasets, limiting their application to large-scale real-world tasks. While end-to-end jointly optimizing GNNs and their accelerators is promising in boosting GNNs' inference efficiency and expediting the design process, it is still underexplored due to the vast and distinct design spaces of GNNs and their accelerators. In this work, we propose G-CoS, a GNN and accelerator co-search framework that can automatically search for matched GNN structures and accelerators to maximize both task accuracy and acceleration efficiency. Specifically, GCoS integrates two major enabling components: (1) a generic GNN accelerator search space which is applicable to various GNN structures and (2) a one-shot GNN and accelerator co-search algorithm that enables simultaneous and efficient search for optimal GNN structures and their matched accelerators. To the best of our knowledge, G-CoS is the first co-search framework for GNNs and their accelerators. Extensive experiments and ablation studies show that the GNNs and accelerators generated by G-CoS consistently outperform SOTA GNNs and GNN accelerators in terms of both task accuracy and hardware efficiency, while only requiring a few hours for the end-to-end generation of the best matched GNNs and their accelerators.
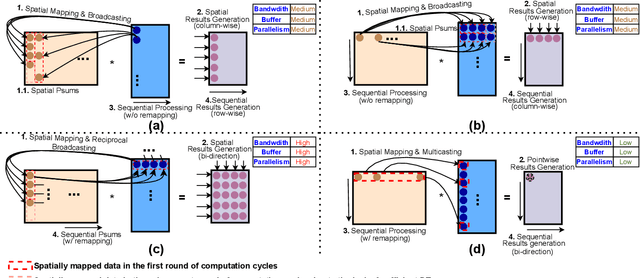
O-HAS: Optical Hardware Accelerator Search for Boosting Both Acceleration Performance and Development Speed
Aug 17, 2021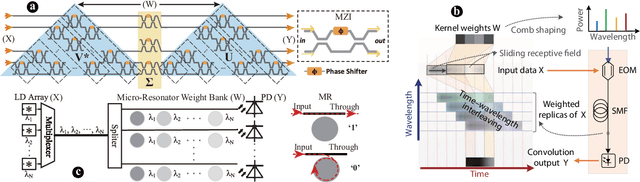
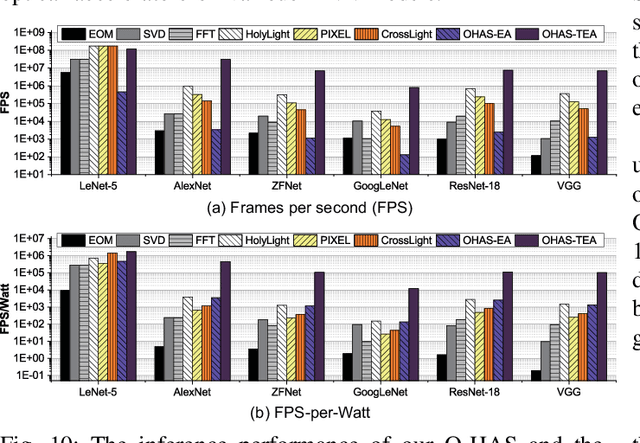
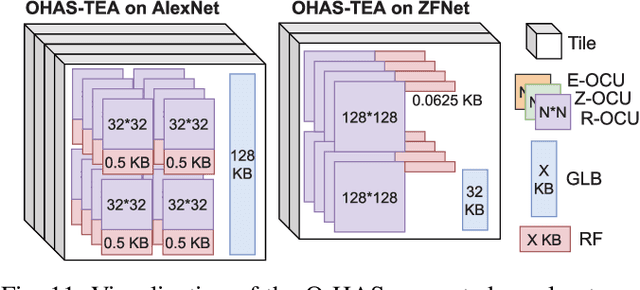
The recent breakthroughs and prohibitive complexities of Deep Neural Networks (DNNs) have excited extensive interest in domain-specific DNN accelerators, among which optical DNN accelerators are particularly promising thanks to their unprecedented potential of achieving superior performance-per-watt. However, the development of optical DNN accelerators is much slower than that of electrical DNN accelerators. One key challenge is that while many techniques have been developed to facilitate the development of electrical DNN accelerators, techniques that support or expedite optical DNN accelerator design remain much less explored, limiting both the achievable performance and the innovation development of optical DNN accelerators. To this end, we develop the first-of-its-kind framework dubbed O-HAS, which for the first time demonstrates automated Optical Hardware Accelerator Search for boosting both the acceleration efficiency and development speed of optical DNN accelerators. Specifically, our O-HAS consists of two integrated enablers: (1) an O-Cost Predictor, which can accurately yet efficiently predict an optical accelerator's energy and latency based on the DNN model parameters and the optical accelerator design; and (2) an O-Search Engine, which can automatically explore the large design space of optical DNN accelerators and identify the optimal accelerators (i.e., the micro-architectures and algorithm-to-accelerator mapping methods) in order to maximize the target acceleration efficiency. Extensive experiments and ablation studies consistently validate the effectiveness of both our O-Cost Predictor and O-Search Engine as well as the excellent efficiency of O-HAS generated optical accelerators.