 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthICL: Scalable In-context Imitation Learning with Synthetic Data
Jun 06, 2026In-context imitation learning (ICIL) enables robots to learn new tasks from a small number of demonstrations by conditioning a pre-trained policy on task-specific examples, without retraining at test time. Despite this promise, training generalizable and scalable in-context imitation policies remains an open challenge. We present SynthICL, a scalable framework that trains ICIL policies entirely from RGB-only synthetic data. Specifically, we build a data generation pipeline to produce high-fidelity ICIL data and train a flow-matching transformer policy on the resulting dataset. SynthICL avoids the need for depth sensing, precise camera calibration, and real-world training data in prior approaches, offering a simpler and more scalable alternative. We further incorporate subgoal prediction by training the model to predict the next subgoal images, enabling more precise and visually grounded control. Evaluated on 16 unseen real-world manipulation tasks, SynthICL achieves an average success rate of 79% with only one demonstration provided at test time and outperforms prior methods. Project page: https://synth-icl.github.io
Instant-Fold: In-Context Imitation Learning for Deformable Object Manipulation
Jun 02, 2026Deformable object manipulation (DOM) is challenging due to high-dimensional, partially observable states that evolve through long-horizon, topology-changing interactions with multiple valid manipulation modes. We introduce Instant-Fold, an in-context imitation learning framework for DOM. Given a single human demonstration, our policy infers and executes diverse manipulation modes directly from the demonstration, including variations in spatial execution and ordering, without requiring gradient updates. Our approach first learns deformation-aware visual representations via temporal contrastive pretraining, after which a flow-matching transformer policy conditioned on the demonstration predicts actions to execute the intended manipulation mode. Trained entirely in simulation, Instant-Fold generalizes across diverse folding modes and transfers zero-shot to real-world settings without additional data collection or finetuning. Videos are available at https://instant-fold.github.io.
Enhancing Multilingual Counterfactual Generation through Alignment-as-Preference Optimization
May 12, 2026Self-generated counterfactual explanations (SCEs) are minimally modified inputs (minimality) generated by large language models (LLMs) that flip their own predictions (validity), offering a causally grounded approach to unraveling black-box LLM behavior. Yet extending them beyond English remains challenging: existing methods struggle to produce valid SCEs in non-dominant languages, and a persistent trade-off between validity and minimality undermines explanation quality. We introduce Macro, a preference alignment framework that applies Direct Preference Optimization (DPO) to multilingual SCE generation, using a composite scoring function to construct preference pairs that effectively translate the trade-off into measurable preference signals. Experiments across four LLMs and seven typologically diverse languages show that Macro improves validity by 12.55\% on average over the chain-of-thought baseline without degrading minimality, while avoiding the severe minimality violations of the translation-based baseline. Compared to supervised fine-tuning, Macro achieves superior performance on both metrics, confirming that explicit preference optimization is essential for balancing this trade-off. Further analyses reveal that Macro increases cross-lingual perturbation alignment and mitigates common generation errors. Our results highlight preference optimization as a promising direction for enhancing multilingual model explanations.
Attack by Unlearning: Unlearning-Induced Adversarial Attacks on Graph Neural Networks
Mar 19, 2026Graph neural networks (GNNs) are widely used for learning from graph-structured data in domains such as social networks, recommender systems, and financial platforms. To comply with privacy regulations like the GDPR, CCPA, and PIPEDA, approximate graph unlearning, which aims to remove the influence of specific data points from trained models without full retraining, has become an increasingly important component of trustworthy graph learning. However, approximate unlearning often incurs subtle performance degradation, which may incur negative and unintended side effects. In this work, we show that such degradations can be amplified into adversarial attacks. We introduce the notion of \textbf{unlearning corruption attacks}, where an adversary injects carefully chosen nodes into the training graph and later requests their deletion. Because deletion requests are legally mandated and cannot be denied, this attack surface is both unavoidable and stealthy: the model performs normally during training, but accuracy collapses only after unlearning is applied. Technically, we formulate this attack as a bi-level optimization problem: to overcome the challenges of black-box unlearning and label scarcity, we approximate the unlearning process via gradient-based updates and employ a surrogate model to generate pseudo-labels for the optimization. Extensive experiments across benchmarks and unlearning algorithms demonstrate that small, carefully designed unlearning requests can induce significant accuracy degradation, raising urgent concerns about the robustness of GNN unlearning under real-world regulatory demands. The source code will be released upon paper acceptance.
Query-Efficient Agentic Graph Extraction Attacks on GraphRAG Systems
Jan 21, 2026Graph-based retrieval-augmented generation (GraphRAG) systems construct knowledge graphs over document collections to support multi-hop reasoning. While prior work shows that GraphRAG responses may leak retrieved subgraphs, the feasibility of query-efficient reconstruction of the hidden graph structure remains unexplored under realistic query budgets. We study a budget-constrained black-box setting where an adversary adaptively queries the system to steal its latent entity-relation graph. We propose AGEA (Agentic Graph Extraction Attack), a framework that leverages a novelty-guided exploration-exploitation strategy, external graph memory modules, and a two-stage graph extraction pipeline combining lightweight discovery with LLM-based filtering. We evaluate AGEA on medical, agriculture, and literary datasets across Microsoft-GraphRAG and LightRAG systems. Under identical query budgets, AGEA significantly outperforms prior attack baselines, recovering up to 90% of entities and relationships while maintaining high precision. These results demonstrate that modern GraphRAG systems are highly vulnerable to structured, agentic extraction attacks, even under strict query limits.
iFlip: Iterative Feedback-driven Counterfactual Example Refinement
Jan 04, 2026Counterfactual examples are minimal edits to an input that alter a model's prediction. They are widely employed in explainable AI to probe model behavior and in natural language processing (NLP) to augment training data. However, generating valid counterfactuals with large language models (LLMs) remains challenging, as existing single-pass methods often fail to induce reliable label changes, neglecting LLMs' self-correction capabilities. To explore this untapped potential, we propose iFlip, an iterative refinement approach that leverages three types of feedback, including model confidence, feature attribution, and natural language. Our results show that iFlip achieves an average 57.8% higher validity than the five state-of-the-art baselines, as measured by the label flipping rate. The user study further corroborates that iFlip outperforms baselines in completeness, overall satisfaction, and feasibility. In addition, ablation studies demonstrate that three components are paramount for iFlip to generate valid counterfactuals: leveraging an appropriate number of iterations, pointing to highly attributed words, and early stopping. Finally, counterfactuals generated by iFlip enable effective counterfactual data augmentation, substantially improving model performance and robustness.
Every Step Evolves: Scaling Reinforcement Learning for Trillion-Scale Thinking Model
Oct 21, 2025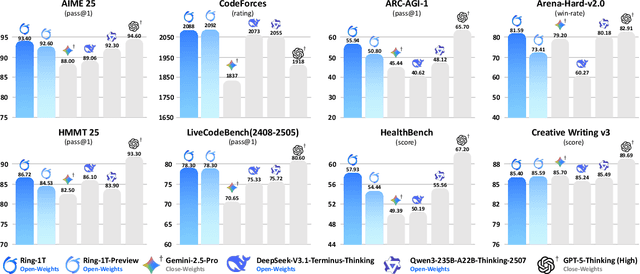
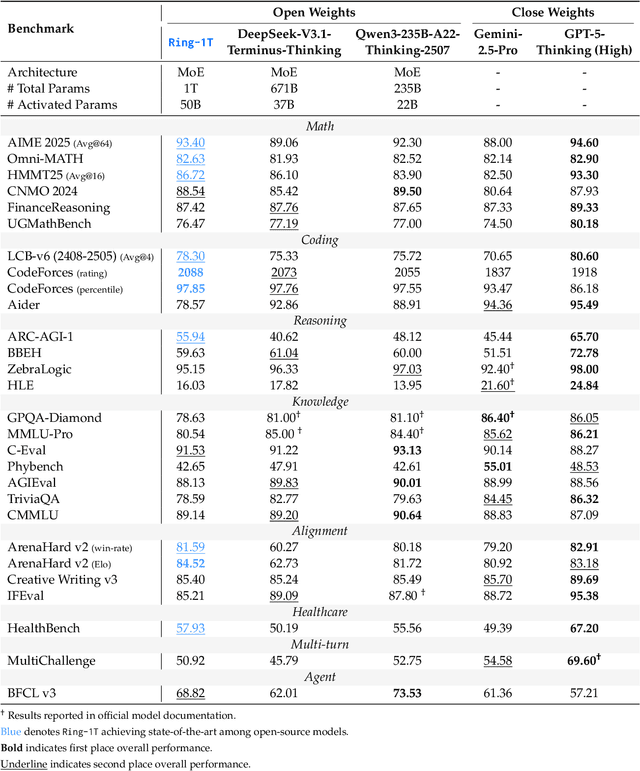
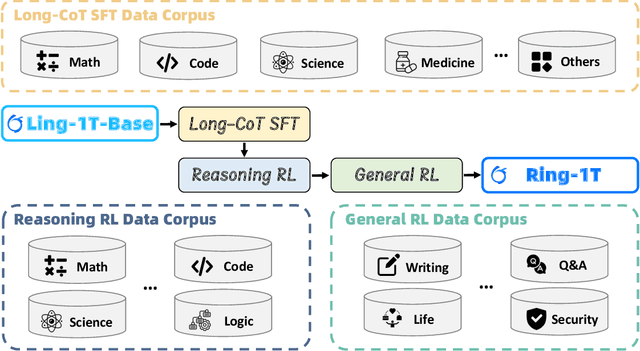
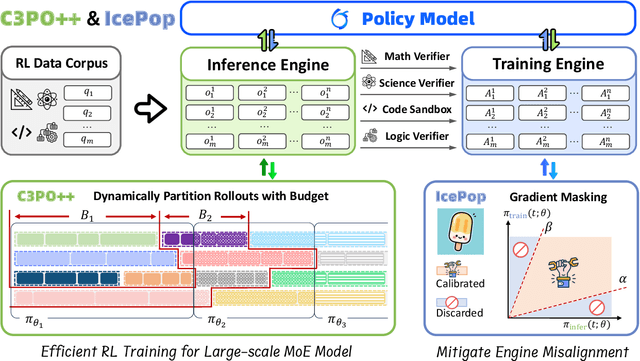
We present Ring-1T, the first open-source, state-of-the-art thinking model with a trillion-scale parameter. It features 1 trillion total parameters and activates approximately 50 billion per token. Training such models at a trillion-parameter scale introduces unprecedented challenges, including train-inference misalignment, inefficiencies in rollout processing, and bottlenecks in the RL system. To address these, we pioneer three interconnected innovations: (1) IcePop stabilizes RL training via token-level discrepancy masking and clipping, resolving instability from training-inference mismatches; (2) C3PO++ improves resource utilization for long rollouts under a token budget by dynamically partitioning them, thereby obtaining high time efficiency; and (3) ASystem, a high-performance RL framework designed to overcome the systemic bottlenecks that impede trillion-parameter model training. Ring-1T delivers breakthrough results across critical benchmarks: 93.4 on AIME-2025, 86.72 on HMMT-2025, 2088 on CodeForces, and 55.94 on ARC-AGI-v1. Notably, it attains a silver medal-level result on the IMO-2025, underscoring its exceptional reasoning capabilities. By releasing the complete 1T parameter MoE model to the community, we provide the research community with direct access to cutting-edge reasoning capabilities. This contribution marks a significant milestone in democratizing large-scale reasoning intelligence and establishes a new baseline for open-source model performance.
Bridging Source and Target Domains via Link Prediction for Unsupervised Domain Adaptation on Graphs
May 29, 2025Graph neural networks (GNNs) have shown great ability for node classification on graphs. However, the success of GNNs relies on abundant labeled data, while obtaining high-quality labels is costly and challenging, especially for newly emerging domains. Hence, unsupervised domain adaptation (UDA), which trains a classifier on the labeled source graph and adapts it to the unlabeled target graph, is attracting increasing attention. Various approaches have been proposed to alleviate the distribution shift between the source and target graphs to facilitate the classifier adaptation. However, most of them simply adopt existing UDA techniques developed for independent and identically distributed data to gain domain-invariant node embeddings for graphs, which do not fully consider the graph structure and message-passing mechanism of GNNs during the adaptation and will fail when label distribution shift exists among domains. In this paper, we proposed a novel framework that adopts link prediction to connect nodes between source and target graphs, which can facilitate message-passing between the source and target graphs and augment the target nodes to have ``in-distribution'' neighborhoods with the source domain. This strategy modified the target graph on the input level to reduce its deviation from the source domain in the embedding space and is insensitive to disproportional label distributions across domains. To prevent the loss of discriminative information in the target graph, we further design a novel identity-preserving learning objective, which guides the learning of the edge insertion module together with reconstruction and adaptation losses. Experimental results on real-world datasets demonstrate the effectiveness of our framework.
One-Shot Dual-Arm Imitation Learning
Mar 10, 2025



We introduce One-Shot Dual-Arm Imitation Learning (ODIL), which enables dual-arm robots to learn precise and coordinated everyday tasks from just a single demonstration of the task. ODIL uses a new three-stage visual servoing (3-VS) method for precise alignment between the end-effector and target object, after which replay of the demonstration trajectory is sufficient to perform the task. This is achieved without requiring prior task or object knowledge, or additional data collection and training following the single demonstration. Furthermore, we propose a new dual-arm coordination paradigm for learning dual-arm tasks from a single demonstration. ODIL was tested on a real-world dual-arm robot, demonstrating state-of-the-art performance across six precise and coordinated tasks in both 4-DoF and 6-DoF settings, and showing robustness in the presence of distractor objects and partial occlusions. Videos are available at: https://www.robot-learning.uk/one-shot-dual-arm.
Every FLOP Counts: Scaling a 300B Mixture-of-Experts LING LLM without Premium GPUs
Mar 07, 2025



In this technical report, we tackle the challenges of training large-scale Mixture of Experts (MoE) models, focusing on overcoming cost inefficiency and resource limitations prevalent in such systems. To address these issues, we present two differently sized MoE large language models (LLMs), namely Ling-Lite and Ling-Plus (referred to as "Bailing" in Chinese, spelled B\v{a}il\'ing in Pinyin). Ling-Lite contains 16.8 billion parameters with 2.75 billion activated parameters, while Ling-Plus boasts 290 billion parameters with 28.8 billion activated parameters. Both models exhibit comparable performance to leading industry benchmarks. This report offers actionable insights to improve the efficiency and accessibility of AI development in resource-constrained settings, promoting more scalable and sustainable technologies. Specifically, to reduce training costs for large-scale MoE models, we propose innovative methods for (1) optimization of model architecture and training processes, (2) refinement of training anomaly handling, and (3) enhancement of model evaluation efficiency. Additionally, leveraging high-quality data generated from knowledge graphs, our models demonstrate superior capabilities in tool use compared to other models. Ultimately, our experimental findings demonstrate that a 300B MoE LLM can be effectively trained on lower-performance devices while achieving comparable performance to models of a similar scale, including dense and MoE models. Compared to high-performance devices, utilizing a lower-specification hardware system during the pre-training phase demonstrates significant cost savings, reducing computing costs by approximately 20%. The models can be accessed at https://huggingface.co/inclusionAI.