 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoRe: Motion-aware Feed-forward 4D Reconstruction Transformer
Mar 05, 2026Reconstructing dynamic 4D scenes remains challenging due to the presence of moving objects that corrupt camera pose estimation. Existing optimization methods alleviate this issue with additional supervision, but they are mostly computationally expensive and impractical in real-time applications. To address these limitations, we propose MoRe, a feedforward 4D reconstruction network that efficiently recovers dynamic 3D scenes from monocular videos. Built upon a strong static reconstruction backbone, MoRe employs an attention-forcing strategy to disentangle dynamic motion from static structure. To further enhance robustness, we fine-tune the model on large-scale, diverse datasets encompassing both dynamic and static scenes. Moreover, our grouped causal attention captures temporal dependencies and adapts to varying token lengths across frames, ensuring temporally coherent geometry reconstruction. Extensive experiments on multiple benchmarks demonstrate that MoRe achieves high-quality dynamic reconstructions with exceptional efficiency.
Chain of World: World Model Thinking in Latent Motion
Mar 03, 2026Vision-Language-Action (VLA) models are a promising path toward embodied intelligence, yet they often overlook the predictive and temporal-causal structure underlying visual dynamics. World-model VLAs address this by predicting future frames, but waste capacity reconstructing redundant backgrounds. Latent-action VLAs encode frame-to-frame transitions compactly, but lack temporally continuous dynamic modeling and world knowledge. To overcome these limitations, we introduce CoWVLA (Chain-of-World VLA), a new "Chain of World" paradigm that unifies world-model temporal reasoning with a disentangled latent motion representation. First, a pretrained video VAE serves as a latent motion extractor, explicitly factorizing video segments into structure and motion latents. Then, during pre-training, the VLA learns from an instruction and an initial frame to infer a continuous latent motion chain and predict the segment's terminal frame. Finally, during co-fine-tuning, this latent dynamic is aligned with discrete action prediction by jointly modeling sparse keyframes and action sequences in a unified autoregressive decoder. This design preserves the world-model benefits of temporal reasoning and world knowledge while retaining the compactness and interpretability of latent actions, enabling efficient visuomotor learning. Extensive experiments on robotic simulation benchmarks show that CoWVLA outperforms existing world-model and latent-action approaches and achieves moderate computational efficiency, highlighting its potential as a more effective VLA pretraining paradigm. The project website can be found at https://fx-hit.github.io/cowvla-io.
MetricAnything: Scaling Metric Depth Pretraining with Noisy Heterogeneous Sources
Jan 29, 2026Scaling has powered recent advances in vision foundation models, yet extending this paradigm to metric depth estimation remains challenging due to heterogeneous sensor noise, camera-dependent biases, and metric ambiguity in noisy cross-source 3D data. We introduce Metric Anything, a simple and scalable pretraining framework that learns metric depth from noisy, diverse 3D sources without manually engineered prompts, camera-specific modeling, or task-specific architectures. Central to our approach is the Sparse Metric Prompt, created by randomly masking depth maps, which serves as a universal interface that decouples spatial reasoning from sensor and camera biases. Using about 20M image-depth pairs spanning reconstructed, captured, and rendered 3D data across 10000 camera models, we demonstrate-for the first time-a clear scaling trend in the metric depth track. The pretrained model excels at prompt-driven tasks such as depth completion, super-resolution and Radar-camera fusion, while its distilled prompt-free student achieves state-of-the-art results on monocular depth estimation, camera intrinsics recovery, single/multi-view metric 3D reconstruction, and VLA planning. We also show that using pretrained ViT of Metric Anything as a visual encoder significantly boosts Multimodal Large Language Model capabilities in spatial intelligence. These results show that metric depth estimation can benefit from the same scaling laws that drive modern foundation models, establishing a new path toward scalable and efficient real-world metric perception. We open-source MetricAnything at http://metric-anything.github.io/metric-anything-io/ to support community research.
View-Guided Point Cloud Completion
Apr 13, 2021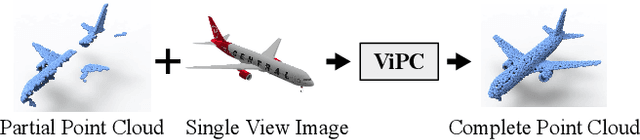
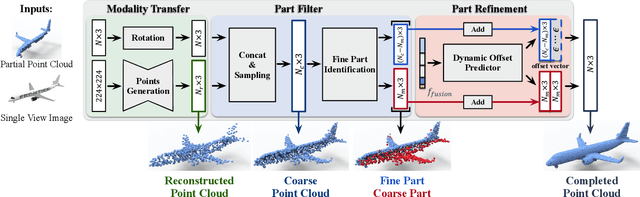
This paper presents a view-guided solution for the task of point cloud completion. Unlike most existing methods directly inferring the missing points using shape priors, we address this task by introducing ViPC (view-guided point cloud completion) that takes the missing crucial global structure information from an extra single-view image. By leveraging a framework that sequentially performs effective cross-modality and cross-level fusions, our method achieves significantly superior results over typical existing solutions on a new large-scale dataset we collect for the view-guided point cloud completion task.